1.本发明涉及绕线设备技术领域,特别涉及一种绕线设备的绕线机构。
背景技术:
2.绕线机是把线状的物体缠绕到特定的工件上的设备,通常用于铜线缠绕。在电吹风设备中,需要通过铜线发热,以产生热风,而需要在电吹风设备中设置铜线圈。
3.现有的绕线设备的绕线方式,一般采用人工绕线的方式,具有人力成本高、耗时长、绕线不均匀等问题。
技术实现要素:
4.本发明的目的是提供一种绕线设备的绕线机构,以解决现有的绕线机构人力成本高的问题。
5.本发明提供了一种绕线设备的绕线机构,包括绕线机械臂、供线模组以及plc控制器,所述绕线机械臂包括x轴滑移模组、与所述x轴滑移模组连接的y轴滑移模组、设于所述y轴滑移模组下端的z轴滑移模组、设于所述z轴滑移模组下端的拉线气缸,以及设于所述拉线气缸下端的拉线气缸针。
6.上述绕线设备的绕线机构,通过x轴滑移模组带动拉线气缸针横向移动,通过y轴滑移模组带动拉线气缸针纵向移动,通过z轴滑移模组带动拉线气缸针上下移动,以使得拉线气缸针可以将发热丝缠绕在发热模组上,其中,拉线气缸针带动发热丝绕至发热模组的绕线柱上后,拉线气缸收缩拉线气缸针,以使得发热丝稳定的缠绕在绕线柱上,然后移动拉线气缸到绕线位置,再伸出拉线气缸针进行绕线,实现自动绕线,提高了绕线效率,减小了人力成本。
7.进一步地,所述供线模组包括走线板、设于所述走线板上的第一导线轮组,以及设于所述走线板末端的第二导线轮组。
8.进一步地,所述z轴滑移模组为升降气缸。
9.进一步地,所述拉线气缸通过两滑轨与所述升降气缸连接。
10.进一步地,所述拉线气缸针的末端设有勾线块,所勾线块成三棱柱状。
11.进一步地,所述拉线气缸位于所述拉线气缸针的位置设有清洁套管。
12.进一步地,所述供线模组还包括设于所述走线板下端的升降气缸。
13.进一步地,所述升降气缸的下端还设有伸缩气缸。
14.进一步地,所述升降气缸与所述走线板对应的位置设有导向柱。
附图说明
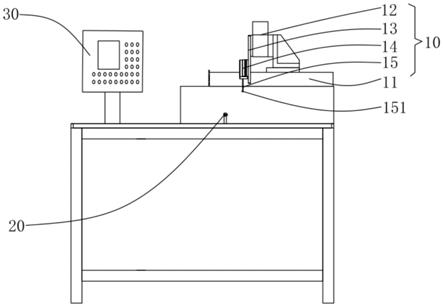
15.图1为本发明第一实施例中的绕线设备的绕线机构的主视结构示意图;
16.图2为图1中的供线模组的俯视图;
17.图3为本发明第二实施例中的绕线设备的绕线机构的主视结构示意图。
18.主要元件符号说明:
19.绕线机械臂10拉线气缸针15第二导线轮组23x轴滑移模组11勾线块151升降气缸24y轴滑移模组12供线模组20plc控制器30z轴滑移模组13走线板21伸缩气缸40拉线气缸14第一导线轮组22
ꢀꢀ
20.如下具体实施方式将结合上述附图进一步说明本发明。
具体实施方式
21.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的若干个实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容更加透彻全面。
22.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
23.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
24.请参阅图1和图2,本发明第一实施例提供的一种绕线设备的绕线机构,包括绕线机械臂10、供线模组20以及plc控制器30,所述绕线机械臂10包括x轴滑移模组11、与所述x轴滑移模组11连接的y轴滑移模组12、设于所述y轴滑移模组12下端的z轴滑移模组13、设于所述z轴滑移模组13下端的拉线气缸14,以及设于所述拉线气缸14下端的拉线气缸针15。
25.上述绕线设备的绕线机构,通过x轴滑移模组11带动拉线气缸针15横向移动,通过y轴滑移模组12带动拉线气缸针15纵向移动,通过z轴滑移模组13带动拉线气缸针15上下移动,以使得拉线气缸针15可以将发热丝缠绕在发热模组上,其中,拉线气缸针15带动发热丝绕至发热模组的绕线柱上后,拉线气缸14收缩拉线气缸针15,以使得发热丝稳定的缠绕在绕线柱上,然后移动拉线气缸14到绕线位置,再伸出拉线气缸针15进行绕线,实现自动绕线,提高了绕线效率,减小了人力成本。
26.具体的,在本实施例中,所述供线模组20包括走线板21、设于所述走线板21上的第一导线轮组22,以及设于所述走线板21末端的第二导线轮组23,使用时,通过第二导线轮组23将供线端的发热丝转向并引导至第一导向轮组22处,并通过第一导向轮组22将发热丝平稳的输送至拉线气缸针15处进行绕线;在具体实施过程中,第一导线轮组22和第二导向轮组23均可以为两个定滑轮。
27.具体的,在本实施例中,所述z轴滑移模组13为升降气缸,以实现z轴移动功能。
28.具体的,在本实施例中,所述拉线气缸针15的末端设有勾线块151,所勾线块151成三棱柱状,以防止发热丝在绕线过中与拉线气缸针15脱离。
29.请参阅图3,本发明第二实施例提供的绕线设备的绕线机构,所述第二实施例与所
述第一实施例的区别在于,所述第二实施例中,所述拉线气缸14通过两滑轨16与所述升降气缸(z轴滑移模组13)连接,以提高拉线气缸14升降的稳定性。
30.具体的,在本实施例中,所述拉线气缸14位于所述拉线气缸针15的位置设有清洁套管(图未示出),以便在拉线气缸针15伸缩的过程中清洁拉线气缸针15,进而保持发热丝的清洁性。
31.具体的,在本实施例中,所述供线模组20还包括设于所述走线板21下端的升降气缸24,以带动供线模组20升降,进而方便拉线气缸针15接触和接触接触发热丝。
32.具体的,在本实施例中,所述升降气缸24的下端还设有伸缩气缸40,以带动供线模组20靠近或者远离拉线气缸针15,进而方便拉线气缸针15接触和接触接触发热丝。
33.具体的,在本实施例中,所述升降气缸24与所述走线板21对应的位置设有导向柱(图未示出),以提高供线模组20升降的稳定性。
34.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
技术特征:
1.一种绕线设备的绕线机构,其特征在于,包括绕线机械臂、供线模组以及plc控制器,所述绕线机械臂包括x轴滑移模组、与所述x轴滑移模组连接的y轴滑移模组、设于所述y轴滑移模组下端的z轴滑移模组、设于所述z轴滑移模组下端的拉线气缸,以及设于所述拉线气缸下端的拉线气缸针。2.根据权利要求1所述的绕线设备的绕线机构,其特征在于,所述供线模组包括走线板、设于所述走线板上的第一导线轮组,以及设于所述走线板末端的第二导线轮组。3.根据权利要求1所述的绕线设备的绕线机构,其特征在于,所述z轴滑移模组为升降气缸。4.根据权利要求3所述的绕线设备的绕线机构,其特征在于,所述拉线气缸通过两滑轨与所述升降气缸连接。5.根据权利要求1所述的绕线设备的绕线机构,其特征在于,所述拉线气缸针的末端设有勾线块,所勾线块成三棱柱状。6.根据权利要求1所述的绕线设备的绕线机构,其特征在于,所述拉线气缸位于所述拉线气缸针的位置设有清洁套管。7.根据权利要求2所述的绕线设备的绕线机构,其特征在于,所述供线模组还包括设于所述走线板下端的升降气缸。8.根据权利要求7所述的绕线设备的绕线机构,其特征在于,所述升降气缸的下端还设有伸缩气缸。9.根据权利要求7所述的绕线设备的绕线机构,其特征在于,所述升降气缸与所述走线板对应的位置设有导向柱。
技术总结
本发明提供了一种绕线设备的绕线机构,包括绕线机械臂、供线模组以及PLC控制器,所述绕线机械臂包括X轴滑移模组、与所述X轴滑移模组连接的Y轴滑移模组、设于所述Y轴滑移模组下端的Z轴滑移模组、设于所述Z轴滑移模组下端的拉线气缸,以及设于所述拉线气缸下端的拉线气缸针。上述绕线设备的绕线机构,通过X轴滑移模组带动拉线气缸针横向移动,通过Y轴滑移模组带动拉线气缸针纵向移动,通过Z轴滑移模组带动拉线气缸针上下移动,以使得拉线气缸针可以将发热丝缠绕在发热模组上,实现自动绕线,提高了绕线效率,减小了人力成本。减小了人力成本。减小了人力成本。
技术研发人员:陈国畯
受保护的技术使用者:深圳市飞象智能家电科技有限公司
技术研发日:2021.11.25
技术公布日:2022/1/21