1.本实用新型涉及一种制造设备领域,具体是涉及一种工件处理桁架机器人。
背景技术:
2.现有的工件处理桁架机器人,存在以下缺陷:一是采用非隔离的工作模式,工作期间不够安全可靠;二是利用机械手将加工件置入机床时,定位不太精确,机器人取放料的工作效率不高;三是机械手采用现有的气缸夹具时,在夹取的过程中,由于加工件在气缸夹具中不能精确定位,是造成加工件置入机床时,定位不太精确的关键因素,需要对气缸夹具进行改进,以满足利用机械手生产加工的需要。
技术实现要素:
3.本实用新型的目的在于提出一种工件处理桁架机器人,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
4.为解决上述技术问题,本实用新型所采用的技术方案是:
5.一种工件处理桁架机器人,包括龙门式机械手、加工件翻转机构、加工件载台、两个丝杠、电机、移动架、加工件放置盘和防护隔离板,丝杠安装在加工件载台上,丝杠从移动架的螺孔中穿过并与螺孔螺纹连接,电机与丝杠的一端联接,加工件放置盘固定在移动架上,防护隔离板位于加工件放置盘的上方并安装在加工件载台两边的支柱上,防护隔离板将加工件载台分隔为加工件放入区和加工件取走区,在电机驱动下,当加工件放置盘移动到加工件放入区时,向加工件放置盘放入加工件,当加工件放置盘移动到加工件取走区时,龙门式机械手将加工件放置盘中的加工件取走并放入到加工件翻转机构中,加工件翻转机构将加工件翻转后,龙门式机械手将加工件翻转机构中的加工件取走并上料。
6.进一步地,所述的加工件翻转机构包括旋转气缸和气缸夹具,气缸夹具固定在旋转气缸的转轴上,旋转气缸固定在龙门式机械手的龙门架上,加工件载台位于龙门架的下方。
7.进一步地,所述的加工件放置盘的表面以分布有56个加工件放置槽,56个加工件放置槽以7行8列的方式分布。
8.进一步地,所述的加工件载台采用箱体的结构形式,加工件载台的底部设有调平式支撑脚。
9.进一步地,所述的龙门式机械手还包括龙门架、横移组件、纵移微调组件和旋转式机械爪,所述横移组件包括横向导轨、横移滑块、电机a、变速器a和横向齿条,横移滑块设在横向导轨上,横向导轨设在龙门架上,横向齿条固定在龙门架上,电机a和变速器a设在横移滑块上,电机a与变速器a联接,变速器a输出轴上的齿轮与横向齿条相啮合,所述的旋转式机械爪设在纵移微调组件上,纵移微调组件设在横移滑块上。
10.进一步地,所述纵移微调组件包括支架、纵向齿条、纵向导轨、纵移滑块、电机b、变速器b、左竖立固定块、右竖立固定块、左竖向导槽、右竖向导槽、电机c、变速器、齿轮、竖立
滑梁和竖向齿条,左竖立固定块和右竖立固定块固定在纵移滑块的侧壁上,纵移滑块安装在纵向导轨上,纵向导轨安装在支架上,纵向齿条固定在支架上并与纵向导轨平行,电机b与变速器b联接,变速器b输出轴上的齿轮与纵向齿条相啮合,左竖向导槽和右竖向导槽分别安装在左竖立固定块、右竖立固定块上,竖立滑梁的两侧边分别位于左竖向导槽和右竖向导槽中,所述的旋转式机械爪安装在竖立滑梁的下端,竖向齿条固定在竖立滑梁上,齿轮安装在变速器的输出轴上并与竖向齿条相啮合,变速器位于纵移滑块上并与电机c联接。
11.进一步地,所述旋转式机械爪包括气缸夹具、基座、变速箱d、电机d和横向转轴,横向转轴通过轴承安装在基座上,气缸夹具固定在横向转轴的一端,横向转轴的另一端与变速箱d的输出轴连接,变速箱d的输入轴与电机d联接。
12.进一步地,所述气缸夹具的周边分布有3个导向座,导向座中穿插有导杆,导杆的一端连接有挡块,导杆的另一端连接有顶板,所述气缸夹具上的三个夹持爪位于顶板的外围,导杆上穿插有复位弹簧,复位弹簧的一端顶压在顶板上,另一端顶压在导向座上。
13.进一步地,所述纵移微调组件和横移组件均设有两个,两个纵移微调组件分别安装在两个横移组件上,两个横移组件安装在一个龙门架上。
14.进一步地,所述龙门架包括横梁、左立柱和右立柱,所述横梁支撑固定在左立柱的上端和右立柱的上端,所述左立柱的下端和右立柱的下端分别固定在左基座和右基座上,左基座和右基座通过螺栓固定在地面上。
15.本实用新型的有益效果在于:
16.本专利能方便地将加工件翻转后再送入机床进行加工,由于防护隔离板将加工件载台分隔为加工件放入区和加工件取走区,提高了生产过程中的安全性。
17.本专利的纵移微调组件能快速将旋转式机械爪抓取的加工件与机床主轴上的夹具对准安装;纵移微调组件通过上下滑动的竖立滑梁带动旋转式机械爪升降,这种结构有利于在机床上的上料。
18.本专利的另一技术特点是对气缸夹具进行了改进,在气缸夹具增设了具有回缩性的顶板,当气缸夹具将加工件夹住时,顶板将加工件顶住,有利于对加工件进行定位,这样有助于精准安装。
附图说明
19.利用附图对本实用新型作进一步说明,但附图中的实施例不构成对本实用新型的任何限制,对于本领域的普通技术人员,在不付出创造性劳动的前提下,还可以根据以下附图获得其它的附图:
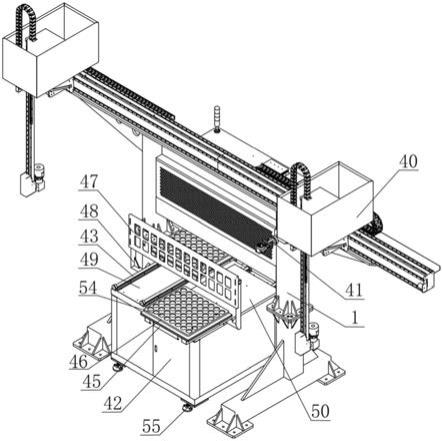
20.图1为本实用新型的结构示意图;
21.图2为图1所示的加工件翻转机构的结构示意图;
22.图3为图1所示的主视图;
23.图4为图3所示的俯视图;
24.图5为图3所示的纵移微调组件的结构示意图;
25.图6为图3所示的旋转式机械爪的结构示意图;
26.图7为图6所示的侧视图。
27.图中:1、龙门架;2、横梁;3、左立柱;4、右立柱;5、左基座;6、右基座;7、纵移微调组
件;8、横向导轨;9、横移滑块;10、电机a;11、变速器a;12、横向齿条;13、支架;14、纵向齿条;15、纵向导轨;16、纵移滑块;17、电机b;18、左竖立固定块;19、右竖立固定块;20、左竖向导槽;21、右竖向导槽;22、电机c;23、变速器;24、齿轮;25、竖立滑梁;26、竖向齿条;27、旋转式机械爪;28、变速器b;29、气缸夹具;30、基座;31、变速箱d;32、电机d;33、横向转轴;34、导向座;35、导杆;36、挡块;37、顶板;38、夹持爪;39、复位弹簧;40、龙门式机械手;41、加工件翻转机构;42、加工件载台;43、丝杠;44、电机;45、移动架;46、加工件放置盘;47、防护隔离板;48、支柱;49、加工件放入区;50、加工件取走区;51、加工件;52、气缸夹具;53、旋转气缸;54、加工件放置槽;55、调平式支撑脚。
具体实施方式
28.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面结合附图和具体实施例对本实用新型作进一步详细的描述,需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
29.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上表面”、“下表面”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“正转”、“反转”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
30.如图1、2所示,一种工件处理桁架机器人,包括龙门式机械手40、加工件翻转机构41、加工件载台42、两个丝杠43、电机44、移动架45、加工件放置盘46和防护隔离板47,丝杠43安装在加工件载台42上,丝杠43从移动架45的螺孔中穿过并与螺孔螺纹连接,电机44与丝杠43的一端联接,加工件放置盘46固定在移动架45上,防护隔离板47位于加工件放置盘46的上方并安装在加工件载台42两边的支柱48上,防护隔离板47将加工件载台42分隔为加工件放入区49和加工件取走区50,在电机44驱动下,当加工件放置盘46移动到加工件放入区49时,向加工件放置盘46放入加工件,当加工件放置盘46移动到加工件取走区50时,龙门式机械手40将加工件放置盘46中的加工件取走并放入到加工件翻转机构41中,加工件翻转机构41将加工件51翻转后,龙门式机械手40将加工件翻转机构中的加工件51取走并上料。
31.所述加工件翻转机构41包括旋转气缸53和气缸夹具52,气缸夹具52固定在旋转气缸53的转轴上,旋转气缸53固定在龙门式机械手的龙门架1上,加工件载台42位于龙门架1的下方。
32.所述加工件放置盘46的表面以分布有56个加工件放置槽54,56个加工件放置槽54以7行8列的方式分布。
33.另外,加工件载台42采用箱体的结构形式,加工件载台42的底部设有调平式支撑脚55。
34.如图3、4所示,所述的龙门式机械手40还包括龙门架1、横移组件、纵移微调组件7和旋转式机械爪27,龙门架1包括横梁2、左立柱3和右立柱4,所述横梁2支撑固定在左立柱3的上端和右立柱4的上端,所述左立柱3的下端和右立柱4的下端分别固定在左基座5和右基座6上,左基座5和右基座6通过螺栓固定在地面上;所述横移组件包括横向导轨8、横移滑块
9、电机a10、变速器a11和横向齿条12,横移滑块9设在横向导轨8上,横向导轨8设在龙门架1的横梁2上,横向齿条12固定在龙门架的横梁2上,电机a10和变速器a11设在横移滑块9上,电机a10与变速器a11联接,变速器a11输出轴上的齿轮与横向齿条12相啮合,所述的旋转式机械爪27设在纵移微调组件7上,纵移微调组件7设在横移滑块9上。
35.如图5所示,纵移微调组件7包括支架13、纵向齿条14、纵向导轨15、纵移滑块16、电机b17、变速器b28、左竖立固定块18、右竖立固定块19、左竖向导槽20、右竖向导槽21、电机c22、变速器23、齿轮24、竖立滑梁25、竖向齿条26和旋转式机械爪27,左竖立固定块18和右竖立固定块19固定在纵移滑块16的侧壁上,纵移滑块16安装在纵向导轨15上,纵向导轨15安装在支架13上,纵向齿条14固定在支架13上并与纵向导轨15平行,电机b17与变速器b28联接,变速器b28输出轴上的齿轮与纵向齿条26相啮合,左竖向导槽20和右竖向导槽21分别安装在左竖立固定块18、右竖立固定块19上,竖立滑梁25的两侧边分别位于左竖向导槽20和右竖向导槽21中,旋转式机械爪27安装在竖立滑梁25的下端,竖向齿条14固定在竖立滑梁25上,齿轮24安装在变速器23的输出轴上并与竖向齿条26相啮合,变速器23位于纵移滑块16上并与电机c22联接。
36.如图6、7所示,所述旋转式机械爪27包括气缸夹具29、基座30、变速箱d31、电机d32和横向转轴33,横向转轴33通过轴承安装在基座30上,气缸夹具29固定在横向转轴33的一端,横向转轴33的另一端与变速箱d31的输出轴连接,变速箱d31的输入轴与电机d32联接。所述气缸夹具29的周边分布有3个导向座34,导向座34中穿插有导杆35,导杆35的一端连接有挡块36,导杆35的另一端连接有顶板37,所述气缸夹具29上的三个夹持爪38位于顶板37的外围,导杆35上穿插有复位弹簧39,复位弹簧39的一端顶压在顶板37上,另一端顶压在导向座34上。
37.此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。