1.本技术涉及板料加工的领域,尤其是涉及一种板料辅助运输结构。
背景技术:
2.建筑行业通常会用到各种形状的板料,板料在辊压机上压制成型后出料,板料在出料的过程中,通常需要人工提前摆放出料架对板料进行支撑,并随着板料的输送,移动出料架,保证板料的平稳出料。
3.针对上述中的相关技术,发明人认为:通过人工移动出料架,操作不便,造成板料的出料不够平稳。
技术实现要素:
4.为了提高板料出料时的稳定性,本技术提供一种板料辅助运输结构。
5.本技术提供的一种板料辅助运输结构,采用如下的技术方案:
6.一种板料辅助运输结构,包括支撑座,支撑座的底壁转动连接有若干滚轮,支撑座的顶壁连接有支撑板,支撑板呈竖向设置。
7.通过采用上述技术方案,将支撑座放置在辊压机的出料位置,板料出料后输送至支撑座的上表面,当板料的端部抵触于支撑板时推动支撑板,支持板带动支撑座移动,滚轮在底面上滚动,从而达到了支撑座随板料自动移动的效果,使得板料平稳出料。
8.可选的,支撑座呈中空状,支撑座的顶部滑移连接有抵触块,支撑座的顶壁开有让位槽,让位槽连通于支撑座的内腔,抵触块沿竖向滑移设置在让位槽内,抵触块的顶壁为弧形面,抵触块的顶壁高度沿远离支撑板的方向逐渐降低,支撑座的底部滑移连接有锁定块,支撑座的底壁开有容纳槽,锁定块沿竖向滑移设置在容纳槽内,支撑座内设置有联动组件,抵触块与锁定块通过联动组件朝相反的方向同步滑移,支撑座内连接有弹性件,弹性件的顶端连接于抵触块。
9.通过采用上述技术方案,初始状态时,抵触块受到弹性件向上的弹性力,使得抵触块的上表面突出支撑座的上表面,锁定块的底壁抵触于地面,通过锁定块与地面之间的摩擦力,将支撑座定位在地面上,提高了支撑座的稳定性。板料出料后,板料的端部在支撑座的上表面移动,板料抵触于抵触块时将抵触块向下压,抵触块通过联动组件带动锁定块向上移动,当锁定块脱离地面后,解除了对支撑座的定位,支撑座通过滚轮的滚动在地面上移动,达到了支撑座自动解除定位的效果。
10.可选的,联动组件包括第一齿条、第二齿条、齿轮,齿轮转动连接于支撑座内,第一齿条和第二齿条均呈竖向设置,齿轮位于第一齿条和第二齿条之间,齿轮分别与第一齿条、第二齿条相啮合,第一齿条和第二齿条均沿竖向滑移连接于支撑座内,抵触块固定连接于第一齿条的顶端,锁定块固定连接于第二齿条的底端。
11.通过采用上述技术方案,抵触块向下移动时带动第一齿条向下移动,第一齿条带动齿轮转动,齿轮带动第二齿条向上移动,第二齿条带动锁定块向上移动,达到了抵触块和
锁定块朝向相反的方向同步滑移的效果。
12.可选的,支撑座内固定连接有第一支撑块和第二支撑块,第一支撑块上沿竖向开有第一滑槽,第一齿条滑移在第一滑槽内,第二支撑块上沿竖向开有第二滑槽,第二齿条滑移在第二滑槽内。
13.通过采用上述技术方案,第一齿条在第一滑槽内滑移,提高了第一齿条滑移时的稳定性,第二齿条在第二滑槽内滑移,提高了第二齿条滑移时的稳定性。
14.可选的,第二齿条的顶部固定有限位板,限位板位于第二支撑块的上方。
15.通过采用上述技术方案,搬动支撑座时,锁定块处于悬空状态,锁定块受自重的影响有向下运动的趋势,通过限位板抵触于第二支撑块,第二支撑块对限位板向上的支撑力,提高了第二齿条的稳定性。
16.可选的,支撑座内连接有定位板,定位板上连接有固定套,锁定块的底部固定有滑移杆,滑移杆穿设在固定套内,滑移杆与固定套滑动配合。
17.通过采用上述技术方案,滑移杆与固定套滑动配合,提高了抵触块升降时的稳定性。
18.可选的,弹性件的底端连接于定位板,弹性件套设在固定套的外侧。
19.通过采用上述技术方案,固定套和滑动杆滑动配合,对弹性件起到支撑和导向的作用,提高了弹性件伸缩时的稳定性。
20.可选的,锁定块的底壁连接有摩擦垫。
21.通过采用上述技术方案,摩擦垫增大了锁定块与地面之间的摩擦力,提高了锁定块对支撑座进行定位时的稳定性。
22.综上所述,本技术包括以下至少一种有益技术效果:
23.1.通过支撑板、支撑座、滚轮的相互配合,达到了支撑座随板料自动移动的效果,提高了板料出料时的稳定性;
24.2.通过抵触块、联动组件、锁定块、弹性件的相互配合,达到了对支撑座进行定位和在板料出料时支撑座自动解除定位的效果,提高了支撑座的稳定性;
25.3.联动组件包括第一齿条、第二齿条、齿轮,达到了抵触块和锁定块朝向相反的方向同步滑移的效果。
附图说明
26.图1是本技术实施例的板料辅助运输结构的结构示意图。
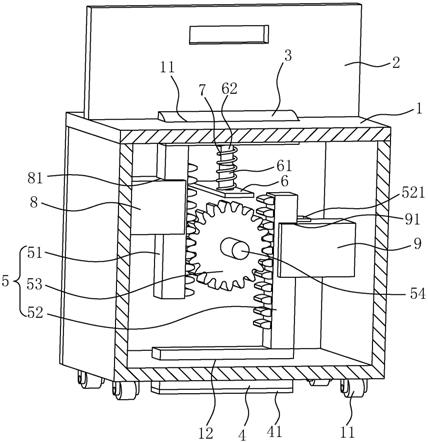
27.图2是本技术实施例的板料辅助运输结构的剖视图,用于体现联动组件。
28.附图标记说明:1、支撑座;11、滚轮;11、让位槽;12、容纳槽;2、支撑板;3、抵触块;4、锁定块;41、摩擦垫;5、联动组件;51、第一齿条;52、第二齿条;521、限位板;53、齿轮;54、转动轴;6、定位板;61、固定套;62、滑移杆;7、弹性件;8、第一支撑块;81、第一滑槽;9、第二支撑块;91、第二滑槽。
具体实施方式
29.以下结合附图1-2对本技术作进一步详细说明。
30.本技术实施例公开一种板料辅助运输结构。
31.参照图1,板料辅助运输结构包括支撑座1,支撑座1呈中空状。支撑座1的外侧底壁转动连接有四个滚轮11,四个滚轮11分布于支撑座1的四个边角,滚轮11用于在地面上滚动。支撑座1的外侧顶壁固定连接有支撑板2,支撑板2呈竖向设置。
32.参照图2,支撑座1的顶壁开有让位槽11,支撑座1的底壁开有容纳槽12,让位槽11、容纳槽12均连通于支撑座1的内腔。让位槽11内沿竖向滑移设置有抵触块3,抵触块3的上表面为弧形面,抵触块3的顶壁高度沿远离支撑板2的方向逐渐降低。容纳槽12内沿竖向滑移设置有锁定块4,抵触块3与锁定块4之间连接有联动组件5,联动组件5位于支撑座1内,抵触块3与锁定块4通过联动组件5朝向相反的方向同步滑移。
33.参照图2,支撑座1内固定连接有定位板6,定位板6呈水平设置,定位板6位于抵触块3的下方。定位板6的上表面固定连接有弹性件7,弹性件7为压簧,弹性件7呈竖向设置,弹性件7的顶端固定连接于抵触块3,弹性件7对抵触块3施加竖直向上的弹性力。
34.支撑座1在初始状态下,抵触块3受到弹性件7的弹力作用,抵触块3穿出支撑座1的顶壁,锁定块4穿出支撑座1的底壁且抵触于地面,通过锁定块4与地面的摩擦力对支撑座1进行定位,滚轮11同时抵触于地面。板料开始出料后,板料沿支撑座1的上表面移动,当板料抵触于抵触块3的上表面时驱动抵触块3向下移动,抵触块3通过联动组件5带动锁定块4上升。锁定块4脱离地面后,使得支撑块解除定位。
35.接着板料抵触于支撑板2后推动支撑板2移动,支撑板2带动支撑座1移动,支撑座1通过滚轮11的滚动随移动,从而达到了支撑板2随板料自动移动的效果。通过锁定块4控制支撑座1的定位和解除定位,使得支撑座1在使用前进行定位,使用时自动解除定位,提高了支撑座1的稳定性和便捷性。
36.参照图2,为了提高抵触块3升降时的稳定性,定位板6的上表面固定连接有固定套61,固定套61的轴线呈竖向设置,固定套61内穿设有滑移杆62,滑移杆62与固定套61滑动配合。滑移杆62的顶端固定连接于抵触块3的底壁,弹性件7套设在固定套61的外侧。滑移杆62和固定套61的滑动配合,提高了抵触块3升降时的稳定性,同时提高了弹性件7伸缩时的稳定性。
37.参照图2,联动组件5包括第一齿条51、第二齿条52、齿轮53,支撑座1的内部固定连接有转动轴54,转动轴54呈水平设置,齿轮53套设在转动轴54上,齿轮53与转动轴54转动连接。第一齿条51和第二齿条52均呈竖向设置,第一齿条51和第二齿条52均啮合于齿轮53,齿轮53位于第一齿条51和第二齿条52之间。
38.参照图2,支撑座1内固定连接有第一支撑块8和第二支撑块9,第一支撑块8上沿竖向开有第一滑槽81,第二支撑块9上沿竖向开有第二滑槽91。第一齿条51沿竖向滑移在第一滑槽81内,第二齿条52沿竖向滑移在第二滑槽91内。第一支撑块8与第一齿条51滑移配合,提高了第一齿条51滑移时的稳定性,第二支撑块9与第二齿条52滑移配合,提高了第二齿条52滑移时的稳定性。
39.参照图2,第一齿条51的顶端固定连接于抵触块3的底壁,第二齿条52的底端固定连接于锁定块4的顶壁。
40.当抵触块3向下移动时,带动第一齿条51向下移动,第一齿条51带动齿轮53转动,齿轮53带动第二齿条52向上移动,第二齿条52带动锁定块4向上移动,达到了抵触块3和锁定块4朝向相反的方向同步滑移的效果。
41.参照图2,搬运支撑座1时,锁定块4处于悬空状态,锁定块4和第二齿条52受自重的影响有向下运动的趋势,为了提高第二齿条52和锁定块4的稳定性,第二齿条52的顶端固定连接有限位板521,限位板521位于第二支撑块9的上方。
42.参照图2,当锁定块4与第二齿条52向下位移距离过长时,限位板521抵触于第二支撑块9,利用第二支撑块9对限位板521的支撑作用力,使得第二齿条52和锁定块4处于稳定状态,从而提高了第二齿条52和锁定块4的稳定性。另外,当支撑座1放置在地面上,且滚轮11和锁定块4同时抵触于地面时,限位板521与第二支撑块9之间具有间距,此时第二支撑块9对限位板521没有支撑,从而使得锁定块4能够抵紧于地面。
43.参照图2,锁定块4的底壁固定连接有摩擦垫41,摩擦垫41为橡胶垫,支撑座1放置在地面时,摩擦垫41增大了锁定块4与地面的摩擦力,从而提高了锁定块4对支撑座1进行定位时的稳定性。
44.本技术实施例一种板料辅助运输结构的实施原理为:支撑座1在初始状态下,抵触块3受到弹性件7的弹力作用,抵触块3穿出支撑座1的顶壁,锁定块4穿出支撑座1的底壁且通过摩擦垫41抵紧于地面,通过摩擦垫41与地面的摩擦力对支撑座1进行定位,滚轮11同时抵触于地面。
45.板料开始出料后,板料沿支撑座1的上表面移动,当板料抵触于抵触块3的上表面时驱动抵触块3向下移动,抵触块3带动第一齿条51向下移动,第一齿条51带动齿轮53转动,齿轮53带动第二齿条52向上移动,第二齿条52带动锁定块4向上移动。锁定块4脱离地面后,使得支撑座1解除定位。
46.接着板料抵触于支撑板2后推动支撑板2移动,支撑板2带动支撑座1移动,支撑座1通过滚轮11的滚动随移动,从而达到了支撑板2随板料自动移动的效果。通过锁定块4控制支撑座1的定位和解除定位,使得支撑座1在使用前进行定位,使用时自动解除定位,提高了支撑座1的稳定性和操作便捷性。
47.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。