1.本实用新型涉及焊接机器人技术领域,具体的涉及大工作空间移动可控机构式汽车车身六轴焊接机器人。
背景技术:
2.焊接机器人是从事焊接(包括切割与喷涂)的工业机器人;根据国际标准化组织工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域;为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器;焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接、切割或热喷涂,汽车车身在焊接时多数采用六轴式机器人,使焊接枪能够对汽车车身进行多角度的焊接。
3.现有对汽车车身焊接用的六轴机器人,由于其不能在具有可自由移动功能的同时,还能将其固定在焊接地面上,导致装置在焊接时,可能会手动外力或者其他冲击力的影响,导致装置出线位置的偏移,而影响装置对汽车车身的焊接质量。
技术实现要素:
4.1.要解决的技术问题
5.本实用新型的目的在于提供大工作空间移动可控机构式汽车车身六轴焊接机器人,以解决上述背景技术中提出的问题。
6.2.技术方案
7.为解决上述问题,本实用新型采取如下技术方案:
8.大工作空间移动可控机构式汽车车身六轴焊接机器人,包括底座和机械臂,所述底座上设有对其进行向上顶起便于装置移动以及跨越障碍物的升降机构,且升降机构上设有便于装置移动的行进机构,并且底座上还设有使行进机构进行转向的驱动机构,所述底座的底端设有与升降机构配合使用且将底座固定在地面上的吸附机构。
9.进一步地,所述升降机构包括开设于底座底端内部的容腔、水平安装于容腔内部的支撑板、等间距安装于支撑板底端且竖直向下设置的电动伸缩杆,每个所述电动伸缩杆的底端均安装有一个独立的行进机构,所述支撑板的顶端中部与驱动机构连接。
10.进一步地,所述行进机构包括通过安装块安装于电动伸缩杆自由端端部的支架、通过转轴转动安装于支架上的滚轮、安装于支架上且与转轴一端连接的电机二,所述滚轮在电动伸缩杆完全收缩时可隐藏于容腔内。
11.进一步地,所述驱动机构包括安装于容腔内顶部且输出端与支撑板顶端中部连接的电机一。
12.更进一步地,所述支撑板、容腔均呈圆形结构,且支撑板的周边延伸至底座的内侧,且底座上开设有与容腔连通且供支撑板周边转动的环形槽。
13.进一步地,所述吸附机构包括等间距设于底座底端四周的吸盘、安装于每个吸盘上且贯穿式安装于底座上并且自由端位于容腔内的管道、安装于每个管道自由端上且对相应吸盘中气体进行单向排放的单向阀、安装于每个管道上且与位于容腔内的排气阀,其中一个所述电动伸缩杆上设有对所有排气阀同时进行控制的碰触开启机构。
14.更进一步地,所述碰触开启机构包括安装于与电动伸缩杆连接的支架顶端的触块、安装于电动伸缩杆侧壁上的连接块、安装于连接块底端且与触块竖直对齐的接触开关,所述电动伸缩杆完全收缩时,触块与接触开关接触,所有排气阀呈关闭的状态定。
15.3.有益效果
16.1、本实用新型通过电动伸缩杆的伸长可将底座以及其上的机械臂向上进行顶起,以使升起的底座能够在行进机构与电动伸缩杆的配合下能够跨越障碍物,同时还方便了人们对该装置移动的控制。
17.2、本实用新型通过电机二的转动使滚轮转动,且通过多个滚轮转动的配合,使该装置实现前进、后退,通过对该装置的移动使其能够具有较大的工作空间,提高该焊接六轴焊接机器人的灵活性能。
18.3、本实用新型通过电机一的转动带动支撑板转动,以此使安装于支撑板上的电动伸缩杆以及安装于电动伸缩杆自由端上的滚轮进行转动角度的控制,以此使该装置能够自由的进行移动,不仅方便了对汽车车身的焊接,还为装置能够顺利跨越障碍物提高有力的条件。
19.4、本实用新型中支撑板在转动时,通过其周围侧边与环形槽的滑动连接,可对转动时的支撑板进行限位式的支撑,以提高支撑板在转动时的稳定性能。
20.5、本实用新型中当所有电动伸缩杆在完全收缩时,底座底端四周安装的吸盘会贴合在地面上,而吸盘内的气体被挤压至管道内并从单向阀处进行释放,此时排气阀呈关闭状态,以此使吸盘能够稳定的吸附在地面上,使该六轴焊接机器人能够稳定的对汽车车身进行焊接。
21.6、本实用新型中当电动伸缩杆完全收缩时,安装于支架上的触块会与接触开关接触,并使排气阀关闭,以此使排完气体的吸盘能够吸附在地面上,并对底座进行固定,相反地,当电动伸缩杆伸长时,触块与接触开关分离,此时排气阀打开使吸盘与外界大气连通,并使底座能够顺利的升起,该种通过将碰触开启机构与升降机构的配合使用,使该装置在升降的过程中,可自动的实现吸盘的吸附与吸附接触两个效果。
附图说明
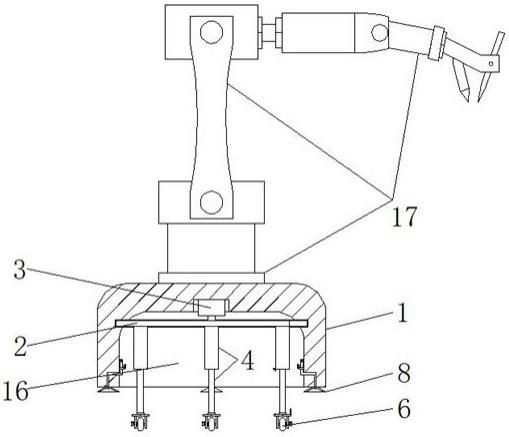
22.图1为本实用新型在移动时的正视内部结构示意图;
23.图2为本实用新型在固定时的正视内部结构示意图;
24.图3为底座的内部结构示意图。
25.附图标记:1、底座;2、支撑板;3、电机一;4、电动伸缩杆;5、支架;6、滚轮;7、电机二;8、吸盘;9、管道;10、单向阀;11、排气阀;12、触块;13、连接块;14、接触开关;15、环形槽;16、容腔;17、机械臂。
具体实施方式
26.下面结合附图和实施例对本实用新型作进一步详细的说明。
实施例
27.如图1、2、3所示的大工作空间移动可控机构式汽车车身六轴焊接机器人,包括底座1和机械臂17,底座1上设有对其进行向上顶起便于装置移动以及跨越障碍物的升降机构,且升降机构上设有便于装置移动的行进机构,并且底座1上还设有使行进机构进行转向的驱动机构,底座1的底端设有与升降机构配合使用且将底座1固定在地面上的吸附机构;
28.如图3所示,升降机构包括开设于底座1底端内部的容腔16、水平安装于容腔16内部的支撑板2、等间距安装于支撑板2底端且竖直向下设置的电动伸缩杆4,每个电动伸缩杆4的底端均安装有一个独立的行进机构,支撑板2的顶端中部与驱动机构连接,通过电动伸缩杆4的伸长可将底座1以及其上的机械臂17向上进行顶起,以使升起的底座1能够在行进机构与电动伸缩杆4的配合下能够跨越障碍物,同时还方便了人们对该装置移动的控制;
29.如图3所示,行进机构包括通过安装块安装于电动伸缩杆4自由端端部的支架5、通过转轴转动安装于支架5上的滚轮6、安装于支架5上且与转轴一端连接的电机二7,滚轮6在电动伸缩杆4完全收缩时可隐藏于容腔16内,通过电机二7的转动使滚轮6转动,且通过多个滚轮6转动的配合,使该装置实现前进、后退,通过对该装置的移动使其能够具有较大的工作空间,提高该焊接六轴焊接机器人使用的灵活性能;
30.如图3所示,驱动机构包括安装于容腔16内顶部且输出端与支撑板2顶端中部连接的电机一3,通过电机一3的转动带动支撑板2转动,以此使安装于支撑板2上的电动伸缩杆4以及安装于电动伸缩杆4自由端上的滚轮6进行转动角度的控制,以此使该装置能够自由的进行移动,不仅方便了对汽车车身的焊接,还为装置能够顺利跨越障碍物提高有力的条件;
31.如图3所示,支撑板2、容腔16均呈圆形结构,且支撑板2的周边延伸至底座1的内侧,且底座1上开设有与容腔16连通且供支撑板2周边转动的环形槽15,支撑板2在转动时,通过其周围侧边与环形槽15的滑动连接,可对转动时的支撑板2进行限位式的支撑,以提高支撑板2在转动时的稳定性能;
32.如图3所示,吸附机构包括等间距设于底座1底端四周的吸盘8、安装于每个吸盘8上且贯穿式安装于底座1上并且自由端位于容腔16内的管道9、安装于每个管道9自由端上且对相应吸盘8中气体进行单向排放的单向阀10、安装于每个管道9上且与位于容腔16内的排气阀11,其中一个电动伸缩杆4上设有对所有排气阀11同时进行控制的碰触开启机构,当所有电动伸缩杆4在完全收缩时,底座1底端四周安装的吸盘8会贴合在地面上,而吸盘8内的气体被挤压至管道9内并从单向阀10处进行释放,此时排气阀11呈关闭状态,以此使吸盘8能够稳定的吸附在地面上,使该六轴焊接机器人能够稳定的对汽车车身进行焊接;
33.如图3所示,碰触开启机构包括安装于与电动伸缩杆4连接的支架5顶端的触块12、安装于电动伸缩杆4侧壁上的连接块13、安装于连接块13底端且与触块12竖直对齐的接触开关14,电动伸缩杆4完全收缩时,触块12与接触开关14接触,所有排气阀11呈关闭的状态,当电动伸缩杆4完全收缩时,安装于支架5上的触块12会与接触开关14接触,并使排气阀11关闭,以此使吸盘8能够吸附在地面上,并对底座1进行固定。
34.上述大工作空间移动可控机构式汽车车身六轴焊接机器人的具体应用过程为:使
用时,当该装置需要移动时,需要先使电动伸缩杆4伸长,在电动伸缩杆4的伸长下底座1会被抬起并使滚轮6能够接触地面,其次通过电机二7的转动驱使滚轮6转动,以此使该六轴焊接机器人能够进行前进或后退,与此同时通过对电机一3转动的控制,使支撑板2、电动伸缩杆4以及滚轮6进行转动,以此使装置能够自由的进行移动,且该焊接机器人在移动时,通过对电动伸缩杆4伸出长度以及电动伸缩杆4使用的个数,使该装置能够顺利地跨过障碍物,并实现快速的转移,以节约该装置移动所用的时间,提高装置的焊接效率;
35.当该焊接机器人移动至指定位置时,通过电动伸缩杆4的收缩将其底端的滚轮6完全收缩至容腔16内,以使底座1能够接触地面,当底座1接触地面时安装于其底端的吸盘8中的气体会被挤压至管道9的内部,此时气体会在管道9上的单向阀10、排气阀11处进行释放,且当电动伸缩杆4完全收缩时,安装于支架5上的触块12会与接触开关14接触,并使排气阀11关闭,以此使排完气体的吸盘8能够吸附在地面上,并对底座1进行固定,相反地,当电动伸缩杆4伸长时,触块12与接触开关14分离,此时排气阀11打开使吸盘8与外界大气连通,并使底座1能够顺利的升起,该种通过将碰触开启机构与升降机构的配合使用,使该装置在升降的过程中,可自动的实现吸盘8的吸附与吸附接触两个效果,这样便完成了该大工作空间移动可控机构式汽车车身六轴焊接机器人的使用过程。
36.本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本实用新型,而并非用作为对本实用新型的限定,只要在本实用新型的实质精神范围内,对以上所述实施例的变化、变型都将落在本实用新型的权利要求范围内。