:
1.本实用新型属于智能装备校正装置技术领域,具体涉及智能装备校正装置。
背景技术:
2.随着科技的发展,很多装备逐步走向智能化,智能装备已经成为当今的生产与生活中必不可少的部分,其中就包括智能数控切割机,它是通过数字程序驱动机床运动的,随着机床运动时,随机配带的切割工具对物体进行切割,智能切割机上的割嘴使用一段时间后,割嘴的位置会发生改变,因此,需要用校正装置对割嘴进行校正。
3.目前智能装备校正装置在对割嘴校正时,只能同时对割嘴的两侧进行校正,校正效果差,同时装置在移动时,一般由人工或者设备进行搬运,移动十分麻烦,以及在校正过程中,一般由人工估测或者用检测装置进行测量,大大降低了校正的效率。
技术实现要素:
4.本实用新型提供了智能装备校正装置,其目的在于解决了目前智能装备校正装置在对割嘴校正时,只能同时对割嘴的两侧进行校正,校正效果差,同时装置在移动时,一般由人工或者设备进行搬运,移动十分麻烦,以及在校正过程中,一般由人工估测或者用检测装置进行测量,大大降低了校正的效率的问题。
5.本实用新型实施例提供了智能装备校正装置,智能装备校正装置,包括u型板,所述u型板上端面的后侧安装有推进结构,所述u型板的上端面位于推进结构的前侧安装有校正结构一,所述u型板的内侧安装有校正结构二,所述校正结构一与校正结构二的内侧放置有智能切割机割嘴,所述u型板的下端面安装有移动配重块。
6.通过采用上述技术方案,通过推进结构推动校正结构一移动至智能切割机割嘴处,便于校正结构一对智能切割机割嘴进行校正,同时利用校正结构一与校正结构二对智能切割机割嘴的四边进行校正,大大提高了对智能切割机割嘴的校正效果,以及校正时无须通过测量迟或者人工进行估算,不仅便于校正,同时还降低了校正的难度,并且通过移动配重块既可以保证装置的稳定放置,也可以手动推动移动,便于整个装置的移动,同时可以将校正过程中受到的震动进行缓冲,确保了校正的精度。
7.进一步地,所述推进结构包括螺纹杆一、支架一、移动块一、导向杆一、l型连接杆、弧形杆与摇手一,所述螺纹杆一的两端通过轴承转动连接有两个支架一,所述支架一与u型板固定连接,所述螺纹杆一的表面螺纹连接有移动块一,所述移动块一另一侧的内部滑动连接有导向杆一,所述导向杆一与支架一固定连接,所述移动块一上端的边侧固定连接有l型连接杆,所述l型连接杆远离移动块一的一端固定连接有弧形杆,所述螺纹杆一的一端穿过一个所述支架一固定连接有摇手一。
8.通过采用上述技术方案,转动摇手一,螺纹杆一转动,在导向杆一的作用下,移动块一朝着校正结构一移动,移动块一通过l型连接杆与弧形杆推动校正结构一移动,便于校正结构一的校正。
9.进一步地,所述校正结构一包括滑槽一、滑块一、移动板、滑槽二、滑块二、移动块二、支架二、螺纹杆二、摇手二、弧形夹块一与导向杆二,所述滑槽一开设在u型板上,所述滑槽一开设有两组,两组所述滑槽一内均滑动连接有滑块一,所述滑块一的上端延伸至滑槽一的外侧固定连接有移动板,所述移动板的上端面开设有滑槽二,所滑槽二内滑动连接有滑块二,所述滑块二的上端延伸至滑槽二的外侧固定连接有移动块二,所述移动板的上端位于滑槽二的边侧固定连接有支架二,所述支架二内通过轴承转动连接螺纹杆二,所述螺纹杆二的一端穿过支架二固定连接有摇手二,所述螺纹杆二的另一端穿过移动块二,所述螺纹杆二与移动块二螺纹连接,所述移动块二的内部位于螺纹杆二的两侧固定连接有两个导向杆二,所述导向杆二的另一端依次穿过移动块二与支架二,所述导向杆二与移动块二固定连接,所述导向杆二与支架二滑动连接,所述导向杆二的头端固定连接有弧形夹块一。
10.通过采用上述技术方案,通过滑槽一与滑块一可保证推进结构在推动时校正结构一可移动,以及转动摇手二,摇手二带动螺纹杆二转动,在滑槽二与滑块二、导向杆二的作用下,螺纹杆二推动移动块二移动,移动块二带动导向杆二推动弧形夹块一移动,弧形夹块一对智能切割机割嘴的两边进行校正。
11.进一步地,所述校正结构二包括活动框、弧形夹块二、螺纹杆三、梅花摇手、螺纹杆四、摇手三、弧形夹块三、导向杆三与导向杆四,所述活动框内侧的一端固定连接有弧形夹块二,所述活动框的外侧远离弧形夹块二的一端固定通过轴承转动连接有螺纹杆三,所述螺纹杆三螺纹安装在u型板的板内,所述螺纹杆三的远离活动框的一端延伸至u型板的外侧固定连接有梅花摇手,所述螺纹杆三内螺纹连接有螺纹杆四,所述螺纹杆四的一端穿过梅花摇手固定连接有摇手三,所述螺纹杆四的另一端延伸至活动框的内侧通过轴承转动连接有弧形夹块三,所述弧形夹块三的两端固定连接有两个导向杆三,两个所述导向杆三与活动框滑动连接,所述活动框的外侧位于螺纹杆三的两边固定连接有导向杆四,所述导向杆四与u型板滑动连接。
12.通过采用上述技术方案,通过转动梅花摇手与摇手三,在导向杆三与导向杆四的作用下,分别使得活动框与弧形夹块三移动,进而通过活动框上的弧形夹块二与弧形夹块三对智能切割机割嘴的另外两边进行校正。
13.进一步地,所述导向杆二的表面设置有刻度线一,所述活动框上端的两侧与导向杆四的表面均设置有刻度线二。
14.通过采用上述技术方案,通过刻度线可对调节的距离进行实时测量,在校正时无须通过测量迟或者人工进行估算,不仅便于校正,同时还降低了校正的难度。
15.进一步地,所述弧形夹块一、弧形夹块二与弧形夹块三的内侧面均固定连接有橡胶垫。
16.通过采用上述技术方案,橡胶垫可以防止智能切割机割嘴在校正时滑动,同时还能避免弧形夹块对智能切割机割嘴造成损伤。
17.进一步地,所述移动配重块设置有三个,三个所述移动配重块均包括上配重块、减震弹簧、导向杆五、下配重块、活动孔、防滑垫、收纳槽、安装槽、充电电池、盖板、电动伸缩杆与万向轮,所述上配重块固定在u型板的下端面,所述上配重块的下端对称固定连接有一组减震弹簧,所述上配重块的下端位于减震弹簧的边侧固定连接有导向杆五,所述减震弹簧的下端固定连接有下配重块,所述下配重块的上端面开设有活动孔,所述活动孔与导向杆
五扣接,所述下配重块的下端面固定连接有防滑垫,所述防滑垫的下端面设置有防滑纹,所述下配重块的下端面开设有收纳槽,所述收纳槽贯穿防滑垫,所述收纳槽上接通有安装槽,所述安装槽内安装有充电电池,所述安装槽的口部通过内六角螺纹锁紧有盖板,所述收纳槽内部的上端通过螺栓安装有电动伸缩杆,所述电动伸缩杆的活动端安装有万向轮,所述下配重块的外侧安装有开关,所述充电电池、电动伸缩杆与开关电连接。
18.通过采用上述技术方案,利用减震弹簧可将装置在使用过程中产生的震动进行缓冲,保证装置校正的精度,同时上配重块、下配重块与防滑垫可保证装置的稳定放置,以及在对装置进行移动时,按下开关,电动伸缩杆延伸,进而将万向轮伸出收纳槽,直接推动装置的移动即可将装置移走,放置时按下另一开关,电动伸缩杆收缩,将万向轮收入收纳槽内即可,实现了装置的移动以及稳定放置。
19.本实用新型的有益效果为:
20.1、本实用新型通过推进结构、校正结构一与校正结构二的设置,推进结构推动校正结构一移动至智能切割机割嘴处,便于校正结构一对智能切割机割嘴进行校正,同时利用校正结构一与校正结构二对智能切割机割嘴的四边进行校正,大大提高了对智能切割机割嘴的校正效果,以及校正结构一与校正结构二上的刻度线一与刻度线二在校正时可对调节的距离进行实时测量,不仅便于校正,同时还降低了校正的难度。
21.2、本实用新型通过移动配重块的设置,移动配重块既可以保证装置的稳定放置,也可以手动推动移动,便于整个装置的移动,同时可以将校正过程中受到的震动进行缓冲,确保了校正的精度。
22.本实用新型的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本实用新型而了解。本实用新型的目的和其他优点可通过在说明书以及附图中所特别指出的结构来实现和获得。
附图说明:
23.附图用来提供对本实用新型进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
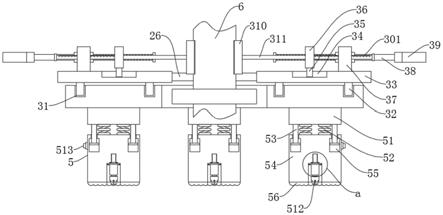
24.图1为本实用新型实施例的主视结构示意图;
25.图2为本实用新型实施例的俯视结构示意图;
26.图3为本实用新型实施例的侧视结构示意图;
27.图4为本实用新型实施例的校正结构二结构示意图;
28.图5为本实用新型实施例的图1a处放大结构示意图;
29.附图标记:1、u型板;2、推进结构;3、校正结构一;4、校正结构二;5、移动配重块;6、智能切割机割嘴;21、螺纹杆一;22、支架一;23、移动块一;24、导向杆一;25、l型连接杆;26、弧形杆;27、摇手一;31、滑槽一;32、滑块一;33、移动板;34、滑槽二;35、滑块二;36、移动块二;37、支架二;38、螺纹杆二;39、摇手二;310、弧形夹块一;311、导向杆二;301、刻度线一;41、活动框;42、弧形夹块二;43、螺纹杆三;44、梅花摇手;45、螺纹杆四;46、摇手三;47、弧形夹块三;48、导向杆三;49、导向杆四;410、橡胶垫;401、刻度线二;51、上配重块;52、减震弹簧;53、导向杆五;54、下配重块;55、活动孔;56、防滑垫;57、收纳槽;58、安装槽;59、充电电池;510、盖板;511、电动伸缩杆;512、万向轮;513、开关。
具体实施方式:
30.为了使得本实用新型的技术方案的目的、技术方案和优点更加清楚,下文中将结合本实用新型具体实施例的附图,对本实用新型实施例的技术方案进行清楚、完整的描述。附图中相同的附图标记代表相同的部件。需要说明的是,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于所描述的本实用新型的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.参照图1、图2、图3、图4和图5,本实用新型实施例提出智能装备校正装置,包括u型板1,u型板1上端面的后侧安装有推进结构2,推进结构2包括螺纹杆一21、支架一22、移动块一23、导向杆一24、l型连接杆25、弧形杆26与摇手一27,螺纹杆一21的两端通过轴承转动连接有两个支架一22,支架一22与u型板1固定连接,螺纹杆一21的表面螺纹连接有移动块一23,移动块一23另一侧的内部滑动连接有导向杆一24,导向杆一24与支架一22固定连接,移动块一23上端的边侧固定连接有l型连接杆25,l型连接杆25远离移动块一23的一端固定连接有弧形杆26,螺纹杆一21的一端穿过一个支架一22固定连接有摇手一27,转动摇手一27,螺纹杆一21转动,在导向杆一24的作用下,移动块一23朝着校正结构一3移动,移动块一23通过l型连接杆25与弧形杆26推动校正结构一3移动,便于校正结构一3的校正,u型板1的上端面位于推进结构2的前侧安装有校正结构一3,校正结构一3包括滑槽一31、滑块一32、移动板33、滑槽二34、滑块二35、移动块二36、支架二37、螺纹杆二38、摇手二39、弧形夹块一310与导向杆二311,滑槽一31开设在u型板1上,滑槽一31开设有两组,两组滑槽一31内均滑动连接有滑块一32,滑块一32的上端延伸至滑槽一31的外侧固定连接有移动板33,移动板33的上端面开设有滑槽二34,所滑槽二34内滑动连接有滑块二35,滑块二35的上端延伸至滑槽二34的外侧固定连接有移动块二36,移动板33的上端位于滑槽二34的边侧固定连接有支架二37,支架二37内通过轴承转动连接螺纹杆二38,螺纹杆二38的一端穿过支架二37固定连接有摇手二39,螺纹杆二38的另一端穿过移动块二36,螺纹杆二38与移动块二36螺纹连接,移动块二36的内部位于螺纹杆二38的两侧固定连接有两个导向杆二311,导向杆二311的另一端依次穿过移动块二36与支架二37,导向杆二311与移动块二36固定连接,导向杆二311与支架二37滑动连接,导向杆二311的头端固定连接有弧形夹块一310,通过滑槽一31与滑块一32可保证推进结构2在推动时校正结构一3可移动,以及转动摇手二39,摇手二39带动螺纹杆二38转动,在滑槽二34与滑块二35、导向杆二311的作用下,螺纹杆二38推动移动块二36移动,移动块二36带动导向杆二311推动弧形夹块一310移动,弧形夹块一310对智能切割机割嘴6的两边进行校正,u型板1的内侧安装有校正结构二4,校正结构二4包括活动框41、弧形夹块二42、螺纹杆三43、梅花摇手44、螺纹杆四45、摇手三46、弧形夹块三47、导向杆三48与导向杆四49,活动框41内侧的一端固定连接有弧形夹块二42,活动框41的外侧远离弧形夹块二42的一端固定通过轴承转动连接有螺纹杆三43,螺纹杆三43螺纹安装在u型板1的板内,螺纹杆三43的远离活动框41的一端延伸至u型板1的外侧固定连接有梅花摇手44,螺纹杆三43内螺纹连接有螺纹杆四45,螺纹杆四45的一端穿过梅花摇手44固定连接有摇手三46,螺纹杆四45的另一端延伸至活动框41的内侧通过轴承转动连接有弧形夹块三47,弧形夹块三47的两端固定连接有两个导向杆三48,两个导向杆三48与活动框41滑动连接,活动框41的外侧位于螺纹杆三43的两边固定连接有导向杆四49,导向杆四49与u型板1
滑动连接,通过转动梅花摇手44与摇手三46,在导向杆三48与导向杆四49的作用下,分别使得活动框41与弧形夹块三47移动,进而通过活动框41上的弧形夹块二42与弧形夹块三47对智能切割机割嘴6的另外两边进行校正,导向杆二311的表面设置有刻度线一301,活动框41上端的两侧与导向杆四49的表面均设置有刻度线二401,通过刻度线可对调节的距离进行实时测量,在校正时无须通过测量迟或者人工进行估算,不仅便于校正,同时还降低了校正的难度,弧形夹块一310、弧形夹块二42与弧形夹块三47的内侧面均固定连接有橡胶垫410,橡胶垫410可以防止智能切割机割嘴6在校正时滑动,同时还能避免弧形夹块对智能切割机割嘴6造成损伤,校正结构一3与校正结构二4的内侧放置有智能切割机割嘴6,u型板1的下端面安装有移动配重块5。
32.参照图1和图5,移动配重块5设置有三个,三个移动配重块5均包括上配重块51、减震弹簧52、导向杆五53、下配重块54、活动孔55、防滑垫56、收纳槽57、安装槽58、充电电池59、盖板510、电动伸缩杆511与万向轮512,上配重块51固定在u型板1的下端面,上配重块51的下端对称固定连接有一组减震弹簧52,上配重块51的下端位于减震弹簧52的边侧固定连接有导向杆五53,减震弹簧52的下端固定连接有下配重块54,下配重块54的上端面开设有活动孔55,活动孔55与导向杆五53扣接,下配重块54的下端面固定连接有防滑垫56,防滑垫56的下端面设置有防滑纹,下配重块54的下端面开设有收纳槽57,收纳槽57贯穿防滑垫56,收纳槽57上接通有安装槽58,安装槽58内安装有充电电池59,安装槽58的口部通过内六角螺纹锁紧有盖板510,收纳槽57内部的上端通过螺栓安装有电动伸缩杆511,电动伸缩杆511的活动端安装有万向轮512,下配重块54的外侧安装有开关513,充电电池59、电动伸缩杆511与开关513电连接,利用减震弹簧52可将装置在使用过程中产生的震动进行缓冲,保证装置校正的精度,同时上配重块51、下配重块54与防滑垫56可保证装置的稳定放置,以及在对装置进行移动时,按下开关513,电动伸缩杆511延伸,进而将万向轮512伸出收纳槽57,直接推动装置的移动即可将装置移走,放置时按下另一开关513,电动伸缩杆511收缩,将万向轮512收入收纳槽57内,进而便于装置的移动。
33.实施方式具体为:该智能装备校正装置,使用时,按下开关513,电动伸缩杆511延伸,进而将万向轮512伸出收纳槽57,直接推动装置的移动,将装置移至校正地点,按下另一开关513,电动伸缩杆511收缩,将万向轮512收入收纳槽57内,防滑垫56与地面接触,进而将装置稳定放置,将智能切割机割嘴6放入活动框41内,转动摇手一27,螺纹杆一21转动,在导向杆一24的作用下,移动块一23朝着校正结构一3移动,移动块一23通过l型连接杆25与弧形杆26推动校正结构一3移动,使得智能切割机割嘴6落在弧形夹块一310之间,转动摇手二39,摇手二39带动螺纹杆二38转动,在滑槽二34与滑块二35、导向杆二311的作用下,螺纹杆二38推动移动块二36移动,移动块二36带动导向杆二311推动弧形夹块一310移动,弧形夹块一310上的橡胶垫410与智能切割机割嘴6接触,通过弧形夹块一310对智能切割机割嘴6的两边进行校正,转动梅花摇手44与摇手三46,在导向杆三48与导向杆四49的作用下,分别使得活动框41与弧形夹块三47移动,弧形夹块二42与弧形夹块三47上的橡胶垫410和智能切割机割嘴6接触,进而通过弧形夹块二42与弧形夹块三47对智能切割机割嘴6的另外两边进行校正,实现对智能切割机割嘴6进行精准校正,校正工作人员通过刻度线一301与刻度线二401对调节距离进行观察,同时在校正过程中装置产生的震动可通过移动配重块5上的减震弹簧52进行缓冲,保证了校正时的精度。
34.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。