1.本实用新型涉及焊接技术领域,尤其涉及一种焊缝焊接用线束安装装置。
背景技术:
2.球罐由于自身承载力高,相同体积下表面积小等优点,被广泛应用于储存和运输各种气体、液体、液化气体。对于新建成的球罐,需要对焊缝进行检测,来确保球罐的密封性,如果检测到焊缝密封性不够,需要重新进行补焊。
3.由于传统的球罐检测装置,是在球罐内部搭脚手架,成本高,费时费力,且需要工作人员在脚手架上进行人工操作,劳动强度大,效率低,且工作环境恶劣,因此,现有技术中一般在球罐内部设置焊缝焊接机器人,通过机器人的机械化操作,完成球罐内壁的自动检测和补焊,但是为了实现机器人的自动化和机械化,机器人自身需要携带焊线;在球罐内部中,受到机器人的规格、使用环境的限制,焊线安装装置需要与机器人相匹配,否则难以完成机器人在球罐内部的机械化、自动化操作。
技术实现要素:
4.针对上述的缺陷,本实用新型的目的在于提供一种焊缝焊接用线束安装装置,其结构简单,焊线安装方便,能够与球罐内部工作的机器人相互匹配,使机器人自行携带焊线,方便机器人在球罐内部进行机械化和自动化补焊。
5.为了实现上述目的,本实用新型提供一种焊缝焊接用线束安装装置,包括焊接结构,所述焊接结构包括行程杆,行程杆上设有能够沿行程杆进行升降活动的固定台;固定台的上面依次设有能够进行伸展活动的第一伸展台和第二伸展台,第二伸展台上设置焊枪;固定台上还设置线束安装结构。
6.所述线束安装结构包括设置于固定台上的安装座,安装座上转动设置第一转轴和第二转轴;所述第一转轴的一端连接第三驱动件,第一转轴上还固定套接绕线辊;所述第二转轴的一端连接第四驱动件,第二转轴上还设有螺纹段,螺纹段的外部螺纹套接导向块,导向块的下部固接滑动轴,滑动轴的底部滑动连接设置于安装座上的移动槽。
7.根据本实用新型的焊缝焊接用线束安装装置,所述行程杆上通过升降组件连接固定台,所述升降组件包括套接在行程杆外部的升降箱,升降箱的外部固定连接固定台;行程杆的一侧设有沿其高度方向设置的升降齿条,升降箱的内部设有与升降齿条配合使用的升降齿轮,升降齿轮上固定穿设驱动柱,驱动柱的两端均转动连接升降箱,驱动柱的一端穿出升降箱后连接第一驱动件。
8.根据本实用新型的焊缝焊接用线束安装装置,所述行程杆上设有升降齿条的相对侧设有滑槽,升降箱的内部设有与滑槽对应使用的滑轨。
9.根据本实用新型的焊缝焊接用线束安装装置,所述固定台上通过移动组件连接第一伸展台,第一伸展台通过所述移动组件连接第二伸展台;所述第一伸展台为倒u型;所述移动组件包括设置于固定台上的移动齿条以及与移动齿条相互啮合的移动齿轮,移动齿轮
固定套接转轴,转轴的一端转动连接第一伸展台的一端内侧,转轴的另一端连接第二驱动件;所述第一伸展台的另一端滑动连接于固定台的上表面。
10.根据本实用新型的焊缝焊接用线束安装装置,所述螺纹段靠近第四驱动件的一端设有限位环。
11.本实用新型的目的在于提供一种焊缝焊接用线束安装装置,通过设置能够进行升降固定台,以及能够伸展的第一伸展台和第二伸展台,使第二伸展台上连接的焊枪,能够对球罐内的不同高度位置以及不同半径长度位置的球罐内表面进行补焊;通过设置线束安装结构,能够使焊接结构在球罐内进行补焊时,自行携带焊线,与焊枪相互配合,实现机械化补焊。综上所述,本实用新型的有益效果是:结构简单,焊线安装方便,能够与球罐内部工作的机器人相互匹配,使机器人自行携带焊线,方便机器人在球罐内部进行机械化和自动化补焊。
附图说明
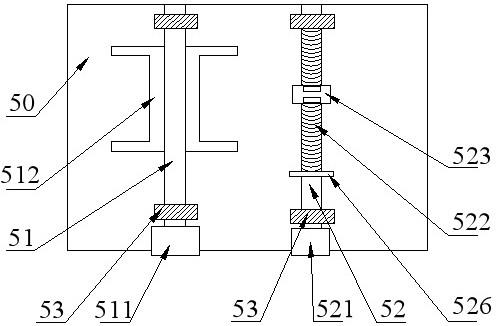
12.图1是本实用新型结构示意图;图2是行程杆和升降箱的俯视结构示意图;图3是固定台和第一伸展台的右视结构示意图;图4是线束安装结构的俯视结构示意图;图5是图4中第二转轴的右视结构示意图;在图中:1-行程杆,11-升降箱,12-升降齿轮,13-第一驱动件,14-升降齿条,15-滑槽,16-滑轨,17-底座;2-固定台,3-第一伸展台,31-转轴,32-移动齿轮,33-移动齿条,34-第二驱动件;4-第二伸展台,41-焊枪;5-线束安装结构,50-安装座,51-第一转轴,511-第三驱动件,512-绕线辊;52-第二转轴,521-第四驱动件,522-螺纹段,523-导向块,524-滑动轴,525-移动槽,526-限位环;53-转座,6-球罐。
具体实施方式
13.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
14.本实用新型提供了一种焊缝焊接用线束安装装置,包括焊接结构和设置在焊接结构上的线束安装结构5。
15.参见图1,焊接结构包括行程杆1,行程杆1上通过升降组件连接固定台2,使固定台2能够在球罐6中沿行程杆1进行升降活动;固定台2上通过移动组件连接第一伸展台3,第一伸展台3通过上述移动组件连接第二伸展台4,使第二伸展台4相对于第一伸展台3进行伸展活动,第一伸展台3相对于固定台2进行伸展活动;第二伸展台4上设置焊枪41和为焊枪41进行上料的上料件,通过上述伸展活动,使焊枪41能够接触到不同半径长度的球罐内壁;固定台2上还设置上述线束安装结构5。
16.上料件可以为两个反向转动的辊轮,两个辊轮之间夹设焊线,使焊线能够向前进行距离移动;由于上料件不是本实用新型的发明点,本实用新型主要发明点在于上料之前的焊线的安装;上料件只要能够在焊枪41附近将焊线传递到待焊接的位置即可,因此,本实用新型对于上料件的具体结构不再赘述;当然,现有技术中也有公开,例如公开号为cn212371402u的专利中公开了一种焊接用上料夹具。
17.参见图4和图5,线束安装结构5包括设置于固定台2上的安装座50,安装座50上通
过转座53转动设置第一转轴51和第二转轴52,第一转轴51的一端连接第三驱动件511,通过第三驱动件511驱动第一转轴51转动;第一转轴51上还固定套接绕线辊512,绕线辊512用于缠绕或者安装焊线。第二转轴52的一端连接第四驱动件521,通过第四驱动件521驱动第二转轴52进行正反转运动,第二转轴52上还设有螺纹段522,螺纹段522的外部螺纹套接导向块523,参见图5,导向块523的上部设置牙口,用于搭接焊线,为焊线导向,导向块523的下部固接滑动轴524,滑动轴524的底部滑动连接设置于安装座50上的移动槽525。
18.使用过程中,在向绕线辊512上缠绕安装焊线时,启动第三驱动件511,使第一转轴51沿同一方向转动,绕线辊512随第一转轴51的转动而转动,可以将焊线缠绕到绕线辊512上,完成焊线的安装;在缠绕安装过程中,通过第四驱动件521使第二转轴52 进行正向和反向的不间断转动,且导向块523螺纹套接在螺纹段522的外部,第二转轴52进行正反转动时,导向块523在螺纹段522上沿第二转轴52的长度方向移动,且从螺纹段522的一端移动到另一端,不断进行往复运动,此时,滑动轴524在移动槽525中滑动;由于导向块523在螺纹段522上进行往复运动,导向块523所导向的焊线能够从绕线辊512的一端缠绕到另一端(在图4中,焊线从绕线辊512的上端缠绕到下端,或者从下端缠绕到上端),保证焊线的均匀缠绕。
19.优选的,螺纹段522靠近第四驱动件521的一端设有限位环526,避免导向块523无限制的向第四驱动件521的一端移动。
20.当然,在进行焊接工作时,将焊线的一端连接到上料件上,通过控制第三驱动件511反向转动,能够使绕线辊512上的焊线向焊枪41的方向移动,焊线脱离绕线辊512。
21.参见图1和图2,本实用新型中,升降组件包括套接在行程杆1外部的升降箱11,升降箱11的外部固定连接固定台2;行程杆1的一侧设有沿其高度方向设置的升降齿条14,升降箱11的内部设有与升降齿条14配合使用的升降齿轮12,升降齿轮12上固定穿设驱动柱,驱动柱的两端均通过轴承转动连接升降箱11,驱动柱的一端穿出升降箱11后连接第一驱动件13。行程杆1的底部还设有底座17,底座17设置于球罐6的内部底侧。
22.使用过程中,第一驱动件13工作,带动驱动柱转动,通过驱动柱的转动使升降齿轮12转动,升降齿轮12转动使升降箱11沿行程杆1进行升降活动。为了保证升降箱11沿行程杆1进行升降活动时,能够定点停止,优选的,第一驱动件13为刹车电机。通过上述升降组件,实现固定台2的升降活动。
23.为了使升降箱11沿行程杆1进行升降活动时能够更顺畅,优选的,行程杆1上设有升降齿条14的相对侧设有滑槽15,升降箱11的内部设有与滑槽15对应使用的滑轨16,通过滑轨16和滑槽15的配合,使升降箱11沿行程杆1顺利进行升降活动。
24.参见图3,第一伸展台3为倒u型。移动组件包括设置于固定台2上的移动齿条33以及与移动齿条33相互啮合的移动齿轮32,移动齿轮32固定套接转轴31,转轴31的一端通过轴承转动连接第一伸展台3的一端内侧,转轴31的另一端连接第二驱动件34,第二驱动件34固接第一伸展台3的底部。第一伸展台3的另一端滑动连接于固定台2的上表面,滑动连接方式可以为滑轨与滑槽的方式。
25.第二驱动件34工作,转轴31转动,带动移动齿轮32转动,移动齿轮32的转动实现其在移动齿条33上的行走,移动齿轮32的行走实现第一伸展台3相对于固定台2的伸展活动。
26.当然,第一伸展台3和第二伸展台4之间的移动组件,与固定台2和第一伸展台3之间的移动组件结构相同。
27.本实用新型中,第二驱动件34、第三驱动件511和第四驱动件521均为电机。
28.综上所述,本实用新型通过设置能够进行升降固定台,以及能够伸展的第一伸展台和第二伸展台,使第二伸展台上连接的焊枪,能够对球罐内的不同高度位置以及不同半径长度位置的球罐内表面进行补焊;通过设置线束安装结构,能够使焊接结构在球罐内进行补焊时,自行携带焊线,与焊枪相互配合,实现机械化补焊。综上所述,本实用新型的有益效果是:结构简单,焊线安装方便,能够与球罐内部工作的机器人相互配合,使机器人自行携带焊线,方便机器人在球罐内部进行机械化和自动化补焊。
29.当然,本实用新型还可有其它多种实施例,在不背离本实用新型精神及其实质的情况下,熟悉本领域的技术人员当可根据本实用新型作出各种相应的改变和变形,但这些相应的改变和变形都应属于本实用新型所附的权利要求的保护范围。