1.本实用新型涉及火车散料装卸技术领域,特别涉及一种火车车厢门解锁机器人。
背景技术:
2.现有火车车厢余煤清除工作大多是采用人工清扫,劳动强度大、工作环境恶劣、效率低。人工清扫的一个重要环节是,需要将车厢侧门打开,有时还需要打开多个车厢门。车厢门关闭是搭扣结构锁紧,每个车厢门有两套搭扣,为了避免长期振动造成搭扣松脱,用钢丝将搭扣绑扎。当需要打开车厢门时,需要在车厢外侧人工剪断绑扎钢丝,并将搭扣翻转解扣,这样才能在车厢内侧开门,并将清扫后的积煤从车门口清除。不仅占用人力、工作环境粉尘大、在车厢运动过程中人工操作,也存在一定安全隐患。
技术实现要素:
3.根据本实用新型实施例,提供了一种火车车厢门解锁机器人,包含:
4.机架;
5.位置调节模块,位置调节模块与机架相连,用于进行位置调节;
6.执行模块,执行模块与位置调节模块的一侧相连,用于对外部的车厢门的锁扣进行剪切和夹持。
7.进一步,位置调节模块包含:
8.第一主模组,第一主模组设置在机架上;
9.第一机械臂,第一机械臂的一端与第一主模组的输出端相连;
10.第二机械臂,第二机械臂的一端与第一机械臂的另一端相连;
11.第三机械臂,第三机械臂的一端与第二机械臂的另一端相连,第三机械臂的另一端与执行模块的一侧相连;
12.第一驱动组件,第一驱动组件设置在第一机械臂与第一主模组的连接处、第一机械臂与第二机械臂的连接处、第二机械臂与第三机械臂的连接处以及第三机械臂与执行模块的连接处。
13.进一步,第一驱动组件为第一驱动关节,第一驱动关节设置在第一机械臂与第一主模组的连接处、第一机械臂与第二机械臂的连接处、第二机械臂与第三机械臂的连接处以及第三机械臂与执行模块的连接处。
14.进一步,位置调节模块包含:
15.第二主模组,第二主模组设置在机架上;
16.第一副模组,第一副模组与第二主模组的输出端相连;
17.第二副模组,第二副模组与第一副模组的输出端和执行模块的一侧相连;
18.第二驱动组件,第二驱动组件设置在第二副模组的输出端与执行模块的一侧的连接处。
19.进一步,第二驱动组件为第二驱动关节,第二驱动关节设置在第二副模组的输出
端与执行模块的一侧的连接处。
20.进一步,执行模块包含:
21.壳体,壳体与位置调节模块的一侧相连;
22.夹爪,夹爪设置在壳体的内部一侧;
23.剪切刀,剪切刀设置在壳体的内部另一侧;
24.驱动装置,驱动装置设置在壳体的底部,用于驱动夹爪和剪切刀运动。
25.进一步,夹爪和剪切刀相互平行设置。
26.根据本实用新型实施例的火车车厢门解锁机器人,可以采用机器人的形式自动断开车厢门上绑扎的钢丝,并且自动解开车厢门搭扣,无需人为,保护人员健康、提高人身安全性,提高无人化程度,更加的具备智能化。
27.要理解的是,前面的一般描述和下面的详细描述两者都是示例性的,并 且意图在于提供要求保护的技术的进一步说明。
附图说明
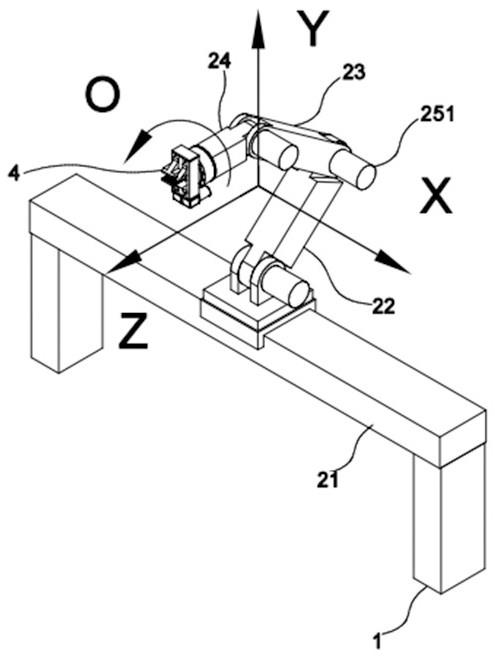
28.图1为根据本实用新型第一种实施例的火车车厢门解锁机器人的立体结构示意图。
29.图2为根据本实用新型第一种实施例的火车车厢门解锁机器人的主视结构示意图。
30.图3为根据本实用新型第一种实施例的火车车厢门解锁机器人的左视结构示意图。
31.图4为根据本实用新型第一种实施例的火车车厢门解锁机器人的俯视结构示意图。
32.图5为根据本实用新型第一种实施例的火车车厢门解锁机器人的执行模块的放大结构示意图。
33.图6为根据本实用新型第二种实施例的火车车厢门解锁机器人的执行模块立体结构示意图。
34.图7为根据本实用新型第二种实施例的火车车厢门解锁机器人的执行模块主视结构示意图。
35.图8为根据本实用新型第二种实施例的火车车厢门解锁机器人的执行模块左视结构示意图。
36.图9为根据本实用新型第二种实施例的火车车厢门解锁机器人的执行模块俯视结构示意图。
37.图10为根据本实用新型火车车厢门解锁机器人解绑车厢门时的结构示意图。
38.图11为车厢门绑扎钢丝时的结构示意图。
39.图12为车厢门搭扣时和解扣时的结构示意图。
具体实施方式
40.以下将结合附图,详细描述本实用新型的优选实施例,对本实用新型做进一步阐述。
41.首先,将结合图1~9描述根据本实用新型实施例的火车车厢门解锁机器人,用于火车车厢门的自动解锁打开,其应用场景很广。
42.如图1~9所示,本实用新型实施例的火车车厢门解锁机器人,包含:机架1、位置调节模块以及执行模块4。
43.具体地,如图1~9所示,在本实施例中,机架1起到支撑的作用,位置调节模块与机架1相连,用于进行位置调节,带动执行模块4在x、y、z坐标系内进行直线运动,使得执行模块4可以运动到工作位置,还可以使得执行模块4进行旋转运动,可以达到任意位置满足工作使用需求,执行模块4与位置调节模块的一侧相连,用于对外部的车厢门的锁扣进行剪切和夹持,实现火车车厢门的自动解扣。
44.进一步,如图1~5所示,在本实施例中,位置调节模块包含:第一主模组21、第一机械臂22、第二机械臂23、第三机械臂24以及第一驱动组件。第一主模组21设置在机架1上,第一主模组21用于提供x轴方向的驱动力,可以间接带动执行模块4进行x轴方向的运动,第一机械臂22的一端与第一主模组21的输出端相连,第二机械臂23的一端与第一机械臂22的另一端相连,第三机械臂24的一端与第二机械臂23的另一端相连,第三机械臂24的另一端与执行模块4的一侧相连,第二机械臂23和第三机械臂24用于通过位于其上第一驱动组件进行y、z轴方向的运动,第一驱动组件设置在第一机械臂22与第一主模组21的连接处、第一机械臂22与第二机械臂23的连接处、第二机械臂23与第三机械臂24的连接处以及第三机械臂24与执行模块4的连接处,位于第三机械臂24与执行模块4的连接处的第一驱动组件用于让执行模块4进行旋转。
45.进一步,如图1~5所示,在本实施例中,第一驱动组件为第一驱动关节251,第一驱动关节251设置在第一机械臂22与第一主模组21的连接处、第一机械臂22与第二机械臂23的连接处、第二机械臂23与第三机械臂24的连接处以及第三机械臂24与执行模块4的连接处,通过第一驱动关节251可以带动第一机械臂22、第二机械臂23以及第三机械臂24对执行模块4进行y、z轴方向的运动,且也可以让执行模块4进行旋转运动,从而让执行模块4可以达到任意位置,满足工作使用需求,提高便利。
46.进一步,如图6~9所示,在本实施例中,位置调节模块包含:第二主模组31、第一副模组32、第二副模组33以及第二驱动组件。第二主模组31设置在机架1上,第二主模组31用于提供x轴方向的驱动力,可以间接带动执行模块4进行x轴方向的运动,第一副模组32与第二主模组31的输出端相连,第一副模组32用于提供y轴方向的驱动力,间接带动执行模块4进行y轴方向的运动,第二副模组33与第一副模组32的输出端和执行模块4的一侧相连,第二副模组33用于提供z轴方向的驱动力,间接带动执行模块4进行z轴方向的运动,第二驱动组件设置在第二副模组33的输出端与执行模块4的一侧的连接处,第二驱动组件用于提供旋转力,带动执行模块4进行旋转,从而可实现执行模块4进行x、y、z轴方向的运动以及旋转运动,可以使执行模块4到达任意位置,满足工作使用要求,提高便捷性。
47.进一步,如图6~9所示,在本实施例中,第二驱动组件为第二驱动关节341,第二驱动关节341设置在第二副模组33的输出端与执行模块4的一侧的连接处,第二驱动关节可以带动执行模块4进行旋转,实现执行模块4的方向调节,为打开火车车厢门提高便利。
48.进一步,如图5所示,在本实施例中,执行模块4包含:壳体41、夹爪42、剪切刀43以及驱动装置44。壳体41与位置调节模块的一侧相连,壳体41用于支撑夹爪42、剪切刀43以及
驱动装置44,夹爪42设置在壳体41的内部一侧,用于对火车车厢门的搭扣进行自动解扣,剪切刀43设置在壳体41的内部另一侧,剪切刀43用于对火车车厢门上绑扎的钢丝进行剪切,驱动装置44设置在壳体41的底部,用于驱动夹爪42和剪切刀43运动,驱动装置44可以采用电机驱动或者气动等。
49.进一步,如图5所示,在本实施例中,夹爪42和剪切刀43相互平行设置,可以防止相互在运动工作的时候相互干扰,保证使用的流畅性。
50.在使用的时候,先通过位置调节模块对执行模块4进行x、y、z轴方向以及旋转方向的调节,然后通过驱动装置44驱动剪切刀43运行,对火车车厢门的绑扎钢丝进行切断,然后在通过驱动装置44驱动夹爪42运行,对火车车厢门上的搭扣进行解扣,从而实现火车车厢门的自动打开。
51.以上,参照图1~12描述了根据本实用新型实施例的火车车厢门解锁机器人,可以采用机器人的形式自动断开车厢门上绑扎的钢丝,并且自动解开车厢门搭扣,无需人为,保护人员健康、提高人身安全性,提高无人化程度,更加的具备智能化。
52.需要说明的是,在本说明书中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包含
……”
限定的要素,并不排除在包括要素的过程、方法、物品或者设备中还存在另外的相同要素。
53.尽管本实用新型的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本实用新型的限制。在本领域技术人员阅读了上述内容后,对于本实用新型的多种修改和替代都将是显而易见的。因此,本实用新型的保护范围应由所附的权利要求来限定。