1.本实用新型属于机械技术领域,涉及一种自动组装设备,特别是一种产品自动组装装置。
背景技术:
2.随着社会经济的快速发展,人工劳力的费用逐渐增加,机械化代替人工作业逐渐成为工业化生产趋势,工业自动化,工业机器人将在企业未来的生产中会发挥着重要的角色。
3.人工在生产中存在以下劣势:
4.1.人口红利消退,使得用工成本逐年增加。
5.2.人员状况影响因素较多,情绪波动大,工作中在管理方面存在困难。
6.3.工作强度高,长时间的生产作业容易使人疲劳,效率低下,产线生产率不足。
7.4.人工作业,生产工艺稳定性差,生产效率不稳定,不良品率居高不下。
8.5.同时作业机械重复、单调乏味,使人员容易厌烦、精神不集中,造成人员和设备的重大安全隐患。
9.6.综合能耗和生产成本较高。
10.7.高噪音、金属粉尘污染对人体健康有害,工人不愿意做,存在招工难的问题。
11.尤其针对小型零件的组装,人工组装的精准性差,工作效率低,成品优良性降低,不合格率增加,同时装配成本高,严重影响经济收益。
技术实现要素:
12.本实用新型的目的是针对现有的技术存在上述问题,提出了一种针对压合式小型零件,通过夹取翻转、压合采用机械操作,实现精准、高效装配的产品自动组装装置。
13.本实用新型的目的可通过下列技术方案来实现:一种产品自动组装装置,包括呈对峙设置的夹取旋转机构和压合机构,所述夹取旋转机构和所述压合机构之间为组装工位,所述夹取旋转机构具有夹取旋转器,所述夹取旋转器具有夹钳,所述夹钳朝所述组装工位伸出,所述压合机构包括压合支架,所述压合支架上呈移动连接夹爪器,所述夹爪器位于所述组装工位的正上方。
14.在上述的产品自动组装装置中,所述压合支架上固设位移传感器,所述位移传感器设置在所述夹爪器的前侧,所述位移传感器通过电路连接组装操控器。
15.在上述的产品自动组装装置中,所述夹取旋转机构还包括夹取支架,所述夹取支架上固设提升气缸,所述提升气缸的提升杆驱动连接所述夹取旋转器。
16.在上述的产品自动组装装置中,所述提升气缸与所述夹取旋转器由组装操控器电控连接。
17.在上述的产品自动组装装置中,所述压合支架的顶端固设横移电缸,所述横移电缸的横移驱动端上固设压合电缸,所述压合电缸驱动连接所述夹爪器。
18.在上述的产品自动组装装置中,所述压合电缸的底端通过力传感器连接所述夹爪器,所述力传感器通过电路连接组装操控器。
19.在上述的产品自动组装装置中,所述横移电缸、所述压合电缸与所述夹爪器由组装操控器电控连接。
20.与现有技术相比,本产品自动组装装置具有以下优点:
21.压合组装形成全自动智能机械操作,从而减少生产人员,减少占用空间,持续作业提升设备利用率,提高生产效率,降低生产成本,提高成品精度与品质,减少不良率,严格的标准化作业,工艺稳定性高,生产率稳定;同时能够对组装过程中产品的零部件是否缺失进行检查。
附图说明
22.图1是本产品自动组装装置的应用俯视结构图。
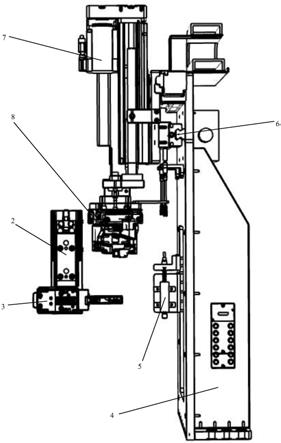
23.图2是本产品自动组装装置的右视平面结构图。
24.图3是本产品自动组装装置的左视平面结构图。
25.图4是本产品自动组装装置的主视平面结构图。
26.图中,1、夹取支架;2、提升气缸;3、夹取旋转器;4、压合支架;5、位移传感器;6、横移电缸;7、压合电缸;8、夹爪器。
具体实施方式
27.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
28.如图1至图4所示,本产品自动组装装置,包括呈对峙设置的夹取旋转机构和压合机构,所述夹取旋转机构和所述压合机构之间为组装工位,所述夹取旋转机构具有夹取旋转器3,所述夹取旋转器3具有夹钳,所述夹钳朝所述组装工位伸出,所述压合机构包括压合支架4,所述压合支架4上呈移动连接夹爪器8,所述夹爪器8位于所述组装工位的正上方。
29.本产品自动组装装置中,夹取旋转机构固装于装配圆台的边沿上,压合机构对应固设在旋转盘的外侧。当旋转盘携带产品工装移动至夹取旋转机构与压合机构之间时进行自动组装作业。
30.压合支架4上固设位移传感器5,所述位移传感器5设置在所述夹爪器8的前侧,所述位移传感器5通过电路连接组装操控器。
31.夹取旋转机构还包括夹取支架1,所述夹取支架1上固设提升气缸2,所述提升气缸2的提升杆驱动连接所述夹取旋转器3。
32.提升气缸2与所述夹取旋转器3由组装操控器电控连接。
33.压合支架4的顶端固设横移电缸6,所述横移电缸6的横移驱动端上固设压合电缸7,所述压合电缸7驱动连接所述夹爪器8。
34.压合电缸7的底端通过力传感器连接所述夹爪器8,所述力传感器通过电路连接组装操控器。
35.横移电缸6、所述压合电缸7与所述夹爪器8由组装操控器电控连接。
36.本产品自动组装装置的运作方法为,组装操控器启动伺服电机继续驱动旋转盘转
动,使产品工装携带零件一、零件二和零件三运转至自动组装装置,由位移传感器5检测后停止旋转盘,组装操控器先启动提升气缸2带动夹取旋转器3升降至设定位置,再启动夹取旋转器3将零件一从产品工装夹取提升后旋转180度,再启动夹爪器8配合力传感器感测功能成功抓取零件一,驱动夹爪器8携带零件一横移至零件二正上方,驱动夹爪器8将零件一下压并通过负压吸附零件二,夹爪器8抬升后再次横移至零件三正上方,再次驱动夹爪器8将零件一和零件二下压与零件三形成压合装配,松开夹爪器8并抬升至初始位置,组装操控器启动伺服电机继续驱动旋转盘转动,使产品工装携带成品至组装完成流道。最后在组装完成流道通过机械手将成品抓取并投入出料口,即整个流程结束,自动生产出压合零件成品。
37.与现有技术相比,本产品自动组装装置具有以下优点:
38.压合组装形成全自动智能机械操作,从而减少生产人员,减少占用空间,持续作业提升设备利用率,提高生产效率,降低生产成本,提高成品精度与品质,减少不良率,严格的标准化作业,工艺稳定性高,生产率稳定;同时能够对组装过程中产品的零部件是否缺失进行检查。
39.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
40.尽管本文较多地使用了夹取支架1;提升气缸2;夹取旋转器3;压合支架4;位移传感器5;横移电缸6;压合电缸7;夹爪器8等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本实用新型的本质;把它们解释成任何一种附加的限制都是与本实用新型精神相违背的。
技术特征:
1.一种产品自动组装装置,其特征在于,包括呈对峙设置的夹取旋转机构和压合机构,所述夹取旋转机构和所述压合机构之间为组装工位,所述夹取旋转机构具有夹取旋转器,所述夹取旋转器具有夹钳,所述夹钳朝所述组装工位伸出,所述压合机构包括压合支架,所述压合支架上呈移动连接夹爪器,所述夹爪器位于所述组装工位的正上方。2.根据权利要求1所述的产品自动组装装置,其特征在于,所述压合支架上固设位移传感器,所述位移传感器设置在所述夹爪器的前侧,所述位移传感器通过电路连接组装操控器。3.根据权利要求1所述的产品自动组装装置,其特征在于,所述夹取旋转机构还包括夹取支架,所述夹取支架上固设提升气缸,所述提升气缸的提升杆驱动连接所述夹取旋转器。4.根据权利要求3所述的产品自动组装装置,其特征在于,所述提升气缸与所述夹取旋转器由组装操控器电控连接。5.根据权利要求1所述的产品自动组装装置,其特征在于,所述压合支架的顶端固设横移电缸,所述横移电缸的横移驱动端上固设压合电缸,所述压合电缸驱动连接所述夹爪器。6.根据权利要求5所述的产品自动组装装置,其特征在于,所述压合电缸的底端通过力传感器连接所述夹爪器,所述力传感器通过电路连接组装操控器。7.根据权利要求5所述的产品自动组装装置,其特征在于,所述横移电缸、所述压合电缸与所述夹爪器由组装操控器电控连接。
技术总结
本实用新型提供了一种产品自动组装装置,包括呈对峙设置的夹取旋转机构和压合机构,夹取旋转机构和压合机构之间为组装工位,夹取旋转机构具有夹取旋转器,夹取旋转器具有夹钳,夹钳朝组装工位伸出,压合机构包括压合支架,压合支架上呈移动连接夹爪器,夹爪器位于组装工位的正上方。本产品自动组装装置具有以下优点:压合组装形成全自动智能机械操作,从而减少生产人员,减少占用空间,持续作业提升设备利用率,提高生产效率,降低生产成本,提高成品精度与品质,减少不良率,严格的标准化作业,工艺稳定性高,生产率稳定;同时能够对组装过程中产品的零部件是否缺失进行检查。中产品的零部件是否缺失进行检查。中产品的零部件是否缺失进行检查。
技术研发人员:龙海辉 曹峰 陈彪 张跃兵
受保护的技术使用者:帕萨思汽车零部件(苏州)有限公司
技术研发日:2021.08.23
技术公布日:2022/2/18