1.本实用新型涉及一种晶圆刷洗机,属于半导体技术领域。
背景技术:
2.半导体产业是现代电子工业的核心,而半导体产业的基础是硅材料工业,晶圆的原始材料是硅,晶圆表面的污染物会严重影响器件的性能、可靠性和成品率,随着微电子技术的飞速发展以及人们要求的提高,污染物对器件的影响也愈加突出,在晶圆的工艺制造过程中,不可避免遭到尘埃、金属、有机物和无机物的污染,这些污染很容易造成其表面缺陷及孔内污垢,产生发射点、黑点、暗斑等,导致晶圆的良品率下降,使得晶圆的质量不稳定以致失效,因此在晶圆的制造过程中去除晶圆表面的污染物十分重要。
3.一般晶圆分为6寸、8寸等尺寸,而6寸的晶圆上具有缺口,在现有的晶圆清洗设备中,通常是机械手臂配合清洗机构等将晶圆清洗后传送至下料机构,但由于整个清洗流程中会导致晶圆的移动,所以导致清洗完放置在下料机构的晶圆上的缺口位置不一致。为了不影响下一流程的进行,此时往往会多加一道工序使得清洗后的晶圆上的缺口方向一致,耗时费力。
技术实现要素:
4.本实用新型的目的在于提供一种清洗效率高,且可将清洗后的晶圆依次排列的晶圆刷洗机。
5.为达到上述目的,本实用新型提供如下技术方案:一种晶圆刷洗机,包括架体、设置在所述架体上的对位机构,其中,所述对位机构包括:
6.吸盘,设置在所述架体内且可相对于所述架体转动;
7.对位件,成对设置在所述吸盘的两侧,在动力装置的作用下可相对于所述吸盘移动以调整所述吸盘上目标物的位置;
8.第一传感器,设置在所述吸盘一侧,所述目标物具有标记点,所述第一传感器用以检测所述目标物标记点的位置;
9.控制器,与所述第一传感器信号连接,所述控制器用以接收所述第一传感器检测到所述目标物标记点的位置,并控制所述吸盘转动以使得所述目标物标记点到达指定位置。
10.进一步地,所述对位件包括基部和自所述基部朝向所述吸盘延伸形成的卡持部,所述卡持部具有卡持面,所述卡持面呈圆弧形。
11.进一步地,所述晶圆刷洗机还包括设置在所述架体上的清洗机构,所述清洗机构包括清洗槽、设置在所述清洗槽内且可相对于所述清洗槽升降的夹持升降单元,所述夹持升降单元用以将所述目标物进行夹持固定。
12.进一步地,所述夹持升降单元包括与所述清洗台连接的升降杆及与所述清洗台连接的夹持件,所述夹持件上设置有与所述目标物进行卡合的凹槽。
13.进一步地,所述晶圆刷洗机还包括设置在所述清洗槽一侧的清洗单元,所述清洗单元用以对所述目标物表面进行清洗。
14.进一步地,所述晶圆刷洗机还包括与所述清洗机构相对设置的翻转机构,所述翻转机构用以将所述目标物夹持并翻转。
15.进一步地,所述翻转机构包括与驱动装置连接的卡持臂,所述卡持臂内凹形成有用以卡持所述目标物的凹槽。
16.进一步地,所述晶圆刷洗机还包括设置在所述对位机构相对侧的上料机构和设置在所述上料机构一侧的下料机构,所述上料机构用以为所述清洗机构提供所述目标物,所述下料机构用以放置清洗完成后的所述目标物。
17.进一步地,所述上料机构包括用以放置若干所述目标物的平台以及第二传感器,所述第二传感器用以确定所述目标物的位置。
18.进一步地,所述晶圆刷洗机还包括传送机构,所述对位机构、清洗机构、上料机构和/或下料机构以及翻转机构围设形成容置区域,所述传送机构设置在所述容置区域内。
19.本实用新型的有益效果在于:通过在晶圆刷洗机内设置有可相对于架体转动的吸盘和设置在吸盘两侧的对位件以及设置在吸盘一侧的第一传感器,使得清洗完成后的目标物的标记点都能够到达指定位置,从而便于下一流程的进行,无需单独增加一道工序,省时省力。
20.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
附图说明
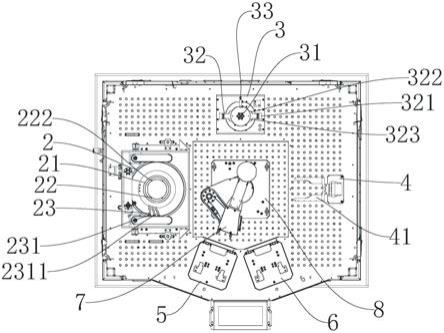
21.图1为本实用新型的晶圆刷洗机的整体结构示意图;
22.图2为图1所示的晶圆刷洗机的剖面图;
23.图3为图1所示的晶圆刷洗机的部分结构放大图。
具体实施方式
24.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
25.请参见图1,本实用新型的一较佳实施例所示的晶圆刷洗机100用以去除晶圆表面污染、生产过程中环境所致的晶圆表面的污染或是工艺过程中产生的粘附于晶圆表面的微颗粒等。
26.请参见图1和图2,晶圆刷洗机100包括架体1、设置在架体1上的清洗机构2、设置在清洗机构2一侧的对位机构3、与清洗机构2相对设置的翻转机构4、与对位机构3相对设置的上料机构5和下料机构6以及传送机构7。其中,清洗机构2、对位机构3、上料机构5和/或下料机构6以及翻转机构4围设形成有容置区域8,传送机构7设置在容置区域8内,以使得晶圆刷洗机100的整体结构更加紧凑,占用空间更小。本实施例中,目标物为晶圆,每个晶圆上都具有标记点,以使得清洗完成后的晶圆的标记点位于同一位置上,以便于下一流程的操作。当该晶圆刷洗机100在工作时,将若干晶圆放置在上料机构5内,传送机构7将上料机构5上的
晶圆传送至对位机构3进行对位,并将对位后的晶圆通过传送机构7传送至清洗机构2内清洗,清洗完成后,传送机构7将晶圆传送至下料机构6。需要说明的是,本实施例中,传送机构7为机械手臂,且该机械手臂的结构为现有技术,在此不做赘述。
27.上料机构5包括用以放置晶圆的晶圆盒(未图示)和用以放置晶圆盒的平台(未图示)。其中,晶圆盒与平台设置为通过卡扣结构可拆卸连接,以方便整盒晶圆的更换,提高工作效率。
28.上料机构5还包括设置在晶圆盒内的第二传感器(未图示),本实施例中,该第二传感器为位置传感器,以确定晶圆的位置。具体的,当传送机构7需要将晶圆盒内的晶圆传送至对位机构3进行对位时,第二传感器对晶圆盒内的若干晶圆进行扫描,并根据用户要求确定需求进行清洗的晶圆,传送机构7将需要清洗且经过第二传感器确定后的晶圆传送至对位机构3,以实现对平台上若干晶圆的标记点进行对位。
29.对位机构3包括设置在架体1上的吸盘31和成对设置在吸盘31两侧的对位件32、设置在吸盘31一侧用以检测晶圆标记点位置的第一传感器33以及与第一传感器33信号连接的控制器(未图示)。其中,吸盘31可相对于架体1转动,而对位件32在动力装置的作用下可相对于吸盘31移动以调整吸盘31上的晶圆的位置。传送机构7将晶圆盒内的晶圆放置在吸盘31上,两个对位件32在动力装置的作用下靠近吸盘31移动并将晶圆卡持对位,使得晶圆的圆心与吸盘31的圆心重合,接下来,控制器接收到第一传感器33检测到的晶圆的标记点的位置后,控制器控制吸盘31转动以使得晶圆的标记点到达指定位置。需要说明的是,本实施例中,第一传感器33为位置传感器,在其他实施例中,第一传感器33还可以为光电传感器,也可以检测到晶圆的标记点是否达到指定位置。
30.请参见图2,具体的,对位件32包括基部321和自基部321朝向吸盘31延伸形成的卡持部322,动力装置推动两个对位件32的基部321朝向晶圆移动,以使得卡持部322将晶圆卡持。本实施例中,卡持部322具有卡持面323,且卡持面323呈圆弧形,这样设置的目的在于:由于晶圆呈圆形,将卡持面323设置为圆弧形可以与圆形的晶圆的边缘适配,以更好地卡持晶圆。
31.请参见图2和图3,清洗机构2包括设置在架体1内的清洗槽21、设置在清洗槽21内且可相对于清洗槽21升降的夹持升降单元22、以及设置在清洗槽21一侧的清洗单元23。其中,夹持升降单元22用以对晶圆进行夹持固定,清洗单元23用以对清洗槽21内被夹持升降单元22固定的晶圆进行清洗。
32.清洗槽21包括清洗台(未标号)和外壁(未图示),清洗槽21的底部开设有出水孔(未图示),以便于将清洗单元23对晶圆清洗后残留的污水通过出水孔和排水管(未图示)排出,避免下一个晶圆在清洗过程中造成污染。外壁围设置在清洗台外侧,以防止清洗单元23在对晶圆进行清洗时,清洗液体迸溅。
33.夹持升降单元22包括与清洗台连接的升降杆(未图示)和与清洗台连接的夹持件222。具体的,升降杆的一端与清洗台的下表面连接,升降杆的另一端与第一电机(未图示)连接,当启动第一电机时,第一电机输出轴带动升降杆于该晶圆刷洗机100的高度方向上上下移动,以便于晶圆清洗时更加方便。当清洗单元23对该晶圆完成清洗后,第一电机带动清洗台和夹持件222高速旋转,以使得完成清洗后的晶圆能够快速干燥。在本实施例中,清洗台上设置有6个夹持件222,且每2个夹持件222为一组,3组夹持件222沿清洗台均匀设置。在
其他实施例中,夹持件222还可以设置为其他个数,只要达到上述效果即可。
34.清洗单元23包括用以对晶圆表面进行清洗的清洗件231,该清洗件231包括用以提供喷洗液体的气体管道(未标号)和液体管道(未标号)、以及与气体管道、液体管道连通且设置在清洗槽21一侧的喷嘴2311,当晶圆放置在清洗台上时,喷嘴2311与气体管道和液体管道连通,以使得混合后的清洗液从喷嘴2311喷射至晶圆表面,从而实现对晶圆表面的清洗。
35.翻转机构4包括与驱动装置(未标号)连接的两个卡持臂41和连接驱动装置与两个卡持臂41的传动件(未标号),驱动装置通过传动件使得两个卡持臂41相互靠近或远离,进而使得两个卡持臂41与晶圆的卡持或释放。更具体的,传动件包括连接轴(未图示)和设置在连接轴两侧并连接两个卡持臂41的导向槽(未图示)。施加外力于驱动装置,驱动装置输出轴推动连接轴转动,以使得两个卡持臂41沿导向槽相对运动或相背运动,从而实现两个卡持臂41与晶圆的卡持或释放,进而实现一次性清洗整个晶圆的表面。
36.请参见图1和图3,为了保证卡持臂41能够更稳定的卡持住晶圆,两个卡持臂41上内凹形成有用以卡持晶圆边缘的凹槽411。施加外力于驱动装置,驱动装置输出轴推动连接轴转动,以使得两个卡持臂41沿导向槽相对运动或相背运动,从而实现两个卡持臂41与晶圆的卡持或释放。当两个卡持臂41与晶圆卡持时,晶圆的部分边缘被收容在凹槽411内;当两个卡持臂41与晶圆释放时,两个卡持臂41远离晶圆移动。
37.为了实现两个卡持臂41的翻转,翻转机构4还包括连接两个卡持臂41与驱动装置输出轴的连接件42,驱动装置启动,通过连接件42使得两个卡持臂41翻转,以实现对晶圆表面的清洗。
38.综上所述:在使用该晶圆刷洗机100时,先将放置有若干晶圆的晶圆盒安装至上料机构内,第二传感器对晶圆盒内待清洗的晶圆进行位置的确定。传送机构7将第二传感器确定的待清洗晶圆传送至对位机构3的吸盘31上。两个对位件32在驱动装置的作用下朝向吸盘31移动,以使得晶圆与吸盘31的圆心重叠。接下来,第一传感器33检测晶圆的标记点的位置,控制器接收第一传感器33的检测信号并控制吸盘31转动,以使得晶圆的标记点到达指定位置。接下来,传动机构7将经过对位的晶圆放置在清洗槽21内,清洗单元23对该晶圆进行冲洗,若该晶圆的另一面也需要清洗,升降杆带动清洗台和夹持件222上升,传送机构7将清洗台上的晶圆传送至翻转机构4。翻转机构4带动晶圆运动至与翻转机构4为同一水平面时,翻转机构4的两个卡持臂41卡持晶圆。驱动装置驱动两个卡持臂41翻转,再一次将该晶圆传送至清洗槽21内对未清洁面进行清洗。清洗结束后,升降杆带动清洗台和夹持件222高速旋转,以使得清洗后的晶圆表面的液体快速干燥在由传送机构7将清洗后的晶圆传送至下料机构6,以完成整个晶圆表面的清洗。
39.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
40.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。