1.本实用新型涉及作业机械技术领域,尤其涉及一种装载机。
背景技术:
2.装载机是一种广泛用于公路、铁路、建筑、水电、港口、矿山等建设工程的土石方施工机械,它主要用于铲装土壤、砂石、石灰、煤炭等散状物料,也可对矿石、硬土等作轻度铲挖作业。此外还可进行推运土壤、刮平地面和牵引其他机械等作业。由于装载机具有作业速度快、效率高、机动性好、操作轻便等优点,因此它成为工程建设中土石方施工的主要机种之一。
3.为了装载机安全作业,需要及时掌握装载机的行驶状态,比如装载机的位置和姿态,目前往往由人工目测来获取装载机的行驶状态,这样的获取方式不够准确,且对人员的经验依赖性较大,安全性和可靠性较差。
技术实现要素:
4.本实用新型实施例提供一种装载机,用以解决现有技术中由人工目测来获取装载机的行驶状态,不够准确,且对人员的经验依赖性较大,安全性和可靠性较差的缺陷,实现装载机的位置姿态的获取方式更加准确,且能够直观地展现出装载机的位置姿态,能够提升装载机的安全性和可靠性。
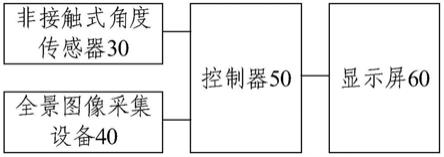
5.本实用新型实施例提供一种装载机,该装载机包括:前车架;后车架,所述前车架与所述后车架铰接;非接触式角度传感器,所述非接触式角度传感器设于所述前车架与所述后车架的铰接区域,所述非接触式角度传感器用于获取所述前车架与所述后车架的角度信息;全景图像采集设备,所述全景图像采集设备用于获取所述装载机的全景图像;控制器,所述非接触式角度传感器以及所述全景图像采集设备均与所述控制器电连接,所述控制器设置为将所述角度信息标记于所述全景图像。
6.根据本实用新型一个实施例的装载机,所述非接触式角度传感器包括:磁性件,所述磁性件设于所述前车架,所述磁性件设于所述铰接区域;感应器,所述感应器设于所述后车架,所述感应器设于所述铰接区域。
7.根据本实用新型一个实施例的装载机,所述磁性件包括磁性螺栓,所述磁性螺栓可拆卸式安装于所述前车架。
8.根据本实用新型一个实施例的装载机,所述磁性件的n极具有豁口,所述豁口朝向所述后车架的方向。
9.根据本实用新型一个实施例的装载机,所述非接触式角度传感器为et-360。
10.根据本实用新型一个实施例的装载机,所述全景图像采集设备包括多个摄像头,多个所述摄像头分别安装于所述装载车的不同位置。
11.根据本实用新型一个实施例的装载机,所述全景图像采集设备包括前视摄像头、左视摄像头、右视摄像头和后视摄像头中的至少一种;其中,所述前视摄像头的镜头朝向所
述装载机的前方,或者,所述左视摄像头的镜头朝向所述装载机的左侧,或者,所述右视摄像头的镜头朝向所述装载机的右侧,或者,所述后视摄像头朝向所述装载机的后方。
12.根据本实用新型一个实施例的装载机,所述前视摄像头安装于所述后车架靠近所述前车架的一端;或者,所述左视摄像头安装于所述后车架的左侧;或者,所述右视摄像头安装于所述后车架的右侧;或者,所述后视摄像头安装于所述后车架背离所述前车架的一端。
13.根据本实用新型一个实施例的装载机,所述前视摄像头为cm30a;或者,所述左视摄像头为cm30a;或者,所述右视摄像头为cm30a;或者,所述后视摄像头为ir100。
14.根据本实用新型一个实施例的装载机,该装载机还包括:显示屏,所述显示屏与所述控制器电连接,所述显示屏用于显示已标记所述角度信息的所述全景图像。
15.本实用新型提供的装载机,通过在前车架和后车架的铰接区域安装非接触式角度传感器来获取前车架和后车架的角度信息,并将该角度信息标记在全景图像采集设备获取的全景图像上,使得装载机的位置姿态的获取方式更加准确,且能够直观地展现出装载机的位置姿态,能够提升装载机的安全性和可靠性。
附图说明
16.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1是本实用新型实施例提供的一种装载机的电连接关系示意图;
18.图2是本实用新型实施例提供的一种装载机的结构示意图;
19.图3是本实用新型实施例提供的一种装载机的后车架的结构示意图;
20.图4是本实用新型实施例提供的一种装载机的局部装配示意图。
21.附图标记:
22.10:前车架;20:后车架;30:非接触式角度传感器;31:磁性件;32:感应器;40:全景图像采集设备;41:摄像头;50:控制器;60:显示屏。
具体实施方式
23.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.下面结合图1至图4描述本实用新型实施例的装载机。
25.需要说明的是,装载机,也被称为铲车,往往应用在建筑工程领域,施工环境往往比较复杂,它主要用于铲装土壤、砂石、石灰和煤炭等散状物料,也可对矿石或者硬土等进行轻度铲挖作业。换装不同的辅助工作装置还可进行推土、起重和其他物料如木材的装卸作业。在道路、特别是在高等级公路施工中,装载机用于路基工程的填挖、沥青混合料和水
泥混凝土料场的集料与装料等作业。此外还可进行推运土壤、刮平地面和牵引其他机械等作业。由于装载机具有作业速度快、效率高、机动性好以及操作轻便等优点,因此它成为工程建设中土石方施工的主要机种之一。
26.如图1、图2和图3所示,本实用新型提供一种装载机,该装载机包括:前车架10、后车架20、非接触式角度传感器30、全景图像采集设备40和控制器50。
27.前车架10与后车架20铰接,前车架10和后车架20能够围绕旋转轴进行旋转。
28.前车架10属于作业机具,前车架10可以包括铲斗,铲斗用于装载物料,前车架10可以具有前车轮,前车轮可以为转向轮,前车轮可以没有驱动力,仅能实现随动。
29.后车架20属于动力机具,后车架20为装载机提供动力,后车架20可以具有后车轮,后车轮具有驱动力,也就是由动力系统驱动后车轮旋转,从而带动装载机整体移动。
30.需要说明的是,装载机的铲掘和装卸物料作业是通过其作业机具的运动来实现的。装载机工作装置由铲斗、动臂、连杆、摇臂、转斗油缸以及动臂油缸等组成。整个前车架10铰接在后车架20上。铲斗通过连杆和摇臂与转斗油缸铰接,用以装卸物料。动臂与车架、动臂油缸铰接,用以升降铲斗。铲斗的翻转和动臂的升降采用液压操纵。
31.装载机作业时作业机具应能保证:当转斗油缸闭锁、动臂油缸举升或降落时,连杆机构使铲斗上下平动或接近平动,以免铲斗倾斜而撒落物料;当动臂处于任何位置、铲斗绕动臂铰点转动进行卸料时,铲斗倾斜角不小于45
°
,卸料后动臂下降时又能使铲斗自动放平。目前装载机主要有七种类型,即按连杆机构的构件数不同,分为三杆式、四杆式、五杆式、六杆式和八杆式等;按输入和输出杆的转向是否相同又分为正转和反转连杆机构等。
32.土方工程用装载机铲斗结构,其斗体常用低碳、耐磨、高强度钢板焊接制成,切削刃采用耐磨的中锰合金钢材料,侧切削刃和加强角板都用高强度耐磨钢材料制成。铲斗切削刀的形状分为四种。齿形的选择应考虑插入阻力、耐磨性和易于更换等因素。齿形分尖齿和钝齿,轮胎式装载机多采用尖形齿,而履带式装载机多采用钝形齿。斗齿数目视斗宽而定,斗齿距一般为150mm至300mm。斗齿结构分整体式和分体式两种,中小型装载机多采用整体式,而大型装载机由于作业条件差、斗齿磨损严重,常采用分体式。分体式斗齿分为基本齿2和齿尖1两部分,磨损后只需要更换齿尖。
33.非接触式角度传感器30设于前车架10与后车架20的铰接区域,非接触式角度传感器30用于获取前车架10与后车架20的角度信息。
34.前车架10与后车架20的角度信息可以为前车架10的纵向与后车架20的纵向之间的夹角。
35.非接触式角度传感器30不需要和旋转轴接触,可以实现无接触式检测,这样就在前车架10和后车架20发生相对转动的时候,非接触式角度传感器30不发生磨损情况,同时非接触式角度传感器30也不会给前车架10和后车架20的相对旋转造成阻力,使得角度检测过程顺畅无障碍。
36.全景图像采集设备40用于获取装载机的全景图像。
37.装载机的全景图像可以为装载机车身周围的全景图像,比如可以为360度无死角的图像。
38.此处全景图像采集设备40可以包括多个摄像头41,多个摄像头41分别朝向机身周围的不同方向,这样可以实现对机身周围环境的全景覆盖。
39.当然,全景图像采集设备40还可以包括一个广角摄像头,通过广角摄像头来获得较宽的视野,或者,全景图像采集设备40还可以包括旋转摄像头,通过旋转摄像头的旋转来改变拍摄方向,从而实现对机身周围环境的全景覆盖。
40.此处不对摄像头41的数量和型号进行限定,本领域技术人员可以根据实际场景需要来选择合适的摄像头41,只要能够获取装载机的全景图像即可。
41.非接触式角度传感器30以及全景图像采集设备40均与控制器50电连接,控制器50设置为将角度信息标记于全景图像。
42.可以理解的是,非接触式角度传感器30能够采集到前车架10与后车架20的角度信息,全景图像采集设备40能够采集到装载机的全景图像,在控制器50中可以进行逻辑运算,将前车架10与后车架20的角度信息标记在全景图像上。
43.可以在全景图像上标记出前车架10纵向直线以及后车架20纵向直线,将角度信息标记在前车架10纵向直线和后车架20纵向直线的夹角处,比如可以直接将前车架10和后车架20的夹角的具体数值直接标注在前车架10纵向直线和后车架20纵向直线的夹角处。
44.标记了角度信息的全景图像能够清楚直观地展示前车架10和后车架20的夹角数值,便于清楚地展现装载机的位置姿态,使得装载机在行驶过程中快速响应和反馈,能够扩大装载机在无人驾驶或者辅助驾驶的应用场景。
45.当然,控制器50还可以根据前车架10和后车架20的角度信息模拟出装载机的预测轨迹,并将该预测轨迹标记在全景图像上,那么就能够实现在装载机转向时,全景图像所展现的视野在变化,预测轨迹也在发生变化。
46.本实用新型提供的装载机,通过在前车架10和后车架20的铰接区域安装非接触式角度传感器30来获取前车架10和后车架20的角度信息,并将该角度信息标记在全景图像采集设备40获取的全景图像上,使得装载机的位置姿态的获取方式更加准确,且能够直观地展现出装载机的位置姿态,能够提升装载机的安全性和可靠性。
47.在一些实施例中,非接触式角度传感器30包括:磁性件31和感应器32。
48.其中,磁性件31设于前车架10,磁性件31设于铰接区域,也就是说,磁性件31安装于前车架10上,并位于前车架10和后车架20的铰接区域。
49.磁性件31具有一定的磁场分布,感应器32能够感知到磁性件31的磁场变化。
50.感应器32设于后车架20,感应器32设于铰接区域,也就是说,感应器32安装于后车架20上,并位于前车架10和后车架20的铰接区域。
51.感应器32和磁性件31可以沿着装载机的纵向相对设置,感应器32和磁性件31分别位于后车架20和前车架10上,两者并不直接接触,但是感应器32能够基于霍尔效应,感知到磁性件31的磁场变化,当装载机的前车架10和后车架20发生相对旋转时,磁性件31和感应器32就产生了相对位置变化,此时感应器32所感知到的磁性件31的磁场分布就发生了变化,感应器32能够将这种磁场变化转化为前车架10和后车架20的角度信息。
52.如图4所示,感应器32可以设置在后车架20与前车架10的铰接中心位置,感应器32随着后车架发生位置变化,前车架10可以具有l形的倒挂结构,磁性件31可以设置在倒挂结构上,磁性件31随着前车架10发生位置变化,磁性件31能够悬空在感应器32的正上方,当前车架10和后车架20旋转时,磁性件31在感应器32中形成的感应磁场会发生变化,感应器32能够将这种磁场变化转化为前车架10和后车架20的角度信息。
53.随着感知到的磁场发生变化,感应器32中产生微弱的信号,将信号转化为4ma至20ma电流给控制器50,控制器50能够结合与特定角度所对应的电流值来得到前车架10和后车架20的角度信息。
54.如图4所示,在一些实施例中,磁性件31包括磁性螺栓,磁性螺栓可拆卸式安装于前车架10,磁性螺栓可以安装在铰接中心的正上方,磁性螺栓与感应器32沿着车身垂向的距离小于10mm,比如可以为8mm,也就是说,磁性件31可以以磁性螺栓的形式安装在前车架10上,这样能够方便拆装,能够提高磁性件31安装的便捷性。
55.在一些实施例中,磁性件31的n极具有豁口,豁口朝向后车架20的方向。
56.磁性件31可以具有n极和s极,此处在磁性件31的n极处设置豁口,在安装时将豁口朝向后车架20的方向,通过在n极设置豁口,能够使得磁性件31的n极和s极容易被区分,就能够使得工作人员在安装磁性件31时很容易就识别到磁性件31的安装方向,提高拆装效率。
57.在一些实施例中,非接触式角度传感器30为et-360,et-360是一种霍尔传感器,能够对磁场的微弱变化产生灵敏的响应,通过采用et-360,能够提高角度信息采集的准确性。
58.如图3所示,在一些实施例中,全景图像采集设备40包括多个摄像头41,多个摄像头41分别安装于装载车的不同位置。多个摄像头41可以设置在装载机的机身不同部位,每个摄像头41分别朝向一个方向,多个摄像头41的拍摄范围合成起来就形成了装载机周围环境的全景图像,这样可以确保对装载机周围环境的全景实时拍摄,相比于旋转摄像头或者广角摄像头来说,获取到的全景图像更加完整,实时性更高。
59.在一些实施例中,全景图像采集设备40包括前视摄像头、左视摄像头、右视摄像头和后视摄像头中的至少一种。
60.其中,前视摄像头的镜头朝向装载机的前方,或者,左视摄像头的镜头朝向装载机的左侧,或者,右视摄像头的镜头朝向装载机的右侧,或者,后视摄像头朝向装载机的后方。
61.也就是说,可以通过不同朝向的摄像头来得到更加完整的全景图像,可以使得全景图像的盲区更小。
62.在一些实施例中,前视摄像头安装于后车架20靠近前车架10的一端;或者,左视摄像头安装于后车架20的左侧;或者,右视摄像头安装于后车架20的右侧;或者,后视摄像头安装于后车架20背离前车架10的一端。
63.将前视摄像头、左视摄像头、右视摄像头以及后视摄像头均安装在后车架20,这样就能够通过后车架20方便地给摄像头供电,避免线缆穿过后车架20和前车架10的连接处,这样,前车架10和后车架20在发生相对旋转时就不会被线缆所干扰,也不会扯断线缆,能够提高图像采集的稳定性。
64.在一些实施例,前视摄像头为cm30a;或者,左视摄像头为cm30a;或者,右视摄像头为cm30a。cm30a是一种超广角夜视防水摄像头,能够拍摄到较大视野的图像,安装在装载机上能够实现夜间拍摄以及雨天拍摄。
65.或者,后视摄像头为ir100,ir100是一种红外摄像头,能够实现夜间拍摄,便于准确地拍摄到装载机后方的图像。
66.如图1所示,在一些实施例中,装载机还包括显示屏60,显示屏60可以直接安装在装载机的驾驶室
67.显示屏60与控制器50电连接,显示屏60用于显示已标记角度信息的全景图像。
68.装载机的驾驶员能够在显示屏60上直观地看到已标注角度信息的全景图像,这样就能够快速准确地对装载机所遇到的情况及时反馈。
69.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。