1.本发明涉及河涌垃圾清理的领域,尤其涉及一种河涌智能清污及监控系统。
背景技术:
2.河涌即河汊,是指比较小的河流或溪流、支汊以及无头无尾的或两头设闸的一段河道等。在河涌中经常会出现一些生活或生产垃圾,造成河涌堵塞,排水速度慢,特别是在雨天较多时,河涌中的垃圾会严重阻碍河涌的排水功能,造成河水快速上涨甚至弥漫出河涌,涌入河涌两旁的道路或农田中。
3.目前,为了清除河涌中的垃圾,通常采用的手段是人工清理,水上环卫工人每天清理河涌中的垃圾,但是人工成本投入大。同时采用人工清理时,对河涌水面上可见的漂浮垃圾能够快速准确的清理,但是对于水面下的垃圾,操作人员无法清楚看到,清理时只能用网兜随机捞取,清理效果不佳。
4.针对上述中的相关技术,发明人认为存在有河涌的垃圾清理人工成本大、清理效果不佳的缺陷。
技术实现要素:
5.为了改善河涌的垃圾清理人工成本大、清理效果不佳的问题,本技术提供一种河涌智能清污及监控系统。
6.本技术提供的一种河涌智能清污及监控系统采用如下的技术方案:一种河涌智能清污及监控系统,包括水闸、支撑架、水力驱动装置、垃圾清理装置和监控装置,所述水闸的上游一端设有横跨河涌的垃圾拦截网,所述水闸设有水道,所述支撑架固定于河涌的两岸,所述水力驱动装置包括水轮机和传动组件,所述水轮机安装于所述水道中,所述水轮机的转轴连接所述传动组件,所述垃圾清理装置包括滑轨、垃圾清理组件,所述滑轨固定于所述支撑架上并设于所述垃圾拦截网的上方,所述滑轨横跨河涌,所述垃圾清理组件滑动安装于所述滑轨上,所述垃圾清理组件能够延伸到所述垃圾拦截网的上游一侧的河水中,所述传动组件连接所述垃圾清理组件并带动所述垃圾清理组件沿所述滑轨往复运动,所述滑轨的两端分别设有使所述垃圾清理组件上的垃圾落下的落料开关,所述监控装置包括控制器、显示终端和两个水位监测器,两个所述水位监测器分别布设于所述垃圾拦截网的上游侧和下游侧,两个所述水位监测器分别连接所述控制器,所述控制器连接所述显示终端,所述控制器接受两个所述水位监测器传递的信号并根据接收的信号向所述显示终端发出显示信号,所述显示终端接收所述控制器发送来的信号并显示。
7.通过采用上述技术方案,垃圾拦截网将河涌中往下游漂的垃圾拦截,聚集在垃圾拦截网处,水轮机在水流的带动下转动,通过传动组件带动垃圾清理组件沿滑轨滑动,垃圾清理组件将聚集在垃圾拦截网处的垃圾捞起并带到河涌的岸边,然后在落料开关处将垃圾放下;随着水轮机的继续转动,通过传动组件带动垃圾清理组件沿滑轨往回运动,垃圾清理组件将聚集在垃圾拦截网处的垃圾再次捞起并带到河涌的另一侧岸边,在落料开关处将垃
圾放下,如此往复,自动将河涌往下游漂的垃圾捞起并带到岸边存放,等待工作人员清理。本技术采用河水的动力推动水轮机来作为垃圾清理的动力,充分利用自然资源,节能环保,成本低廉。当垃圾清理装置损坏或者垃圾拦截网被细碎垃圾堵塞时,垃圾拦截网上游和下游的水位就会出现差值,当水位差值超过设定值时,控制器向显示终端发送显示指令,显示垃圾拦截网被堵塞的信息,工作人员根据显示终端显示的信息能够及时知道垃圾拦截网被堵塞的消息,及时作出应对措施。
8.优选的,所述传动组件包括转盘和推拉杆,所述转盘固定连接于所述水轮机的转轴,所述推拉杆的一端通过万向接头连接所述转盘并随所述转盘做圆周运动,所述推拉杆的另一端通过万向接头连接所述垃圾清理组件。
9.通过采用上述技术方案,转盘带动推拉杆的一端做圆周运动,从而使得推拉杆的另一端带动垃圾清理组件做往复运动。
10.优选的,所述滑轨的两端延伸到河涌的两岸,所述滑轨的两端分别设有一段往上倾斜的倾斜部。
11.通过采用上述技术方案,滑轨往上倾斜能带动垃圾清理组件往上提升离开水面,使得垃圾清理组件能够从两岸的地面上方通过,避免两岸的地面阻碍垃圾清理组件的往复运动。
12.优选的,所述垃圾清理组件包括小车、聚集架、两个托架和联动结构,所述小车安装于所述滑轨上并能够沿所述滑轨运动,所述聚集架固定于所述小车的下方,两个所述托架分别转动安装于所述聚集架的下端的两侧,所述托架与聚集架之间的夹角不大于90
°
,所述托架与聚集架之间设有复位弹簧,所述联动结构连接所述托架,所述落料开关通过联动机构驱动所述托架转动。
13.通过采用上述技术方案,在小车带动聚集架往复运动的过程中,聚集架将拦截网上游侧的垃圾往岸边一侧拨动聚集并贴在聚集架上,托架从下方将垃圾托住,避免垃圾从聚集架的下方通过,当垃圾被带到滑轨的两端时,落料开关通过联动机构驱动托架转动到竖直状态,对垃圾的举托力消失,垃圾在自身的重力作用下掉落到岸边的地面上;随着水轮机的继续驱动,传动组件带动聚集架往回运动,将拦截网上游侧的垃圾捞取并往另一侧的岸边运输。
14.优选的,所述聚集架靠近所述垃圾拦截网的一端设有刷子,所述刷子抵接所述垃圾拦截网。
15.通过采用上述技术方案,对于一些细小的垃圾,聚集架和托架无法捞取,这些垃圾的一部分会吸附到垃圾拦截网的网孔处,堵塞垃圾拦截网,筛子来回对垃圾拦截网进行刷洗,保持垃圾拦截网的网孔畅通。
16.优选的,所述联动结构包括两块滑块和两条拉索,两块所述滑块分别滑动安装于所述小车的两端,所述滑块与小车之间设有伸缩弹簧,一根所述拉索连接同一侧的所述托架和滑块,所述拉索的护套固定于所述聚集架上,所述拉索的钢丝的一端固定连接所述托架远离所述聚集架的一端,所述拉索的钢丝的另一端固定连接所述滑块。
17.通过采用上述技术方案,滑块的滑动拉动拉索的钢丝,拉索的钢丝拉动托架远离聚集架的一端,使得托架由托举状态转动到竖直状态,滑块回到原位时,拉索的钢丝的拉力消失,托架在复位弹簧的作用下复位到托举状态,托架的托举状态和竖直状态之间的转换
只需推动滑块即可。
18.优选的,所述落料开关包括顶杆,所述顶杆安装于所述滑轨的两端,所述顶杆能够推动所述滑块滑动。
19.通过采用上述技术方案,小车运动到顶杆处时,滑块顶到顶杆的一端,被顶杆阻挡,而小车在推拉杆的推动下继续运动,使得滑块沿小车运动的后方滑动,带动托架转动,从而实现开关的功能。
20.优选的,所述顶杆滑动连接所述支撑架,所述顶杆外套设有压缩弹簧,所述压缩弹簧的两端分别固定连接所述支撑架和顶杆,所述顶杆远离所述滑块的一端连接有用于击打所述聚集架的击打结构。
21.通过采用上述技术方案,滑块与顶杆接触并推动顶杆向前滑动,压缩弹簧被压缩,对顶杆产生一个向后的作用力,顶杆对滑块产生一个向后的作用力,推动滑块向小车运动方向的后方运动,带动托架转动;同时顶杆的向前运动带动击打结构击打在聚集架上,使得聚集架发生震动,将附着在聚集架上的垃圾震落。
22.优选的,所述击打结构包括连杆、曲轴、凸轮和击打锤,所述连杆的两端分别铰接于所述曲轴和顶杆,所述曲轴转动安装于支撑架上,所述凸轮固定于所述曲轴上,所述击打锤铰接所述支撑架,所述击打锤与支撑架之间设有拉力弹簧,所述击打锤的锤柄抵接所述凸轮的下部,所述击打锤的锤头设于所述聚集架的上方并能够击打在所述聚集架上。
23.通过采用上述技术方案,连杆和曲轴将滑杆的直线运动转换成圆周运动传递给凸轮,凸轮转动到击打锤的锤柄与凸轮的最小半径处时,击打锤的锤头在拉力弹簧的作用下下降,击打在聚集架上,使得聚集架产生震动,将聚集架上的垃圾震落。
24.综上所述,本技术包括以下至少一种有益技术效果:1.本技术采用河水的动力推动水轮机来作为垃圾清理的动力,充分利用自然资源,节能环保,成本低廉。当垃圾清理装置损坏或者垃圾拦截网被细碎垃圾堵塞时,垃圾拦截网上游和下游的水位就会出现差值,当水位差值超过设定值时,控制器向显示终端发送显示指令,显示垃圾拦截网被堵塞的信息,工作人员根据显示终端显示的信息能够及时作出应对措施,提高故障处理速度和效率;2.滑轨的两端分别设有一段往上倾斜的倾斜部,垃圾清理组件运动到倾斜部时随倾斜部往上运动,垃圾清理组件被提升出水面,从岸边的地面上方通过,避免岸边的地面阻碍垃圾清理组件的运动;3.击打结构能够击打在聚集架上,使得聚集架发生震动,将附着在聚集架上的垃圾震落,提高垃圾的清理效率。
附图说明
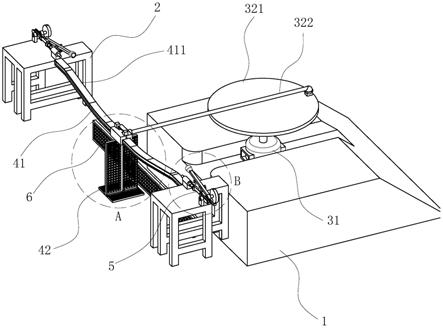
25.图1是本技术实施例的一种河涌智能清污及监控系统的结构示意图。
26.图2是图1的a处放大图。
27.图3是图1的b处放大图。
28.附图标记说明:1、水闸;2、支撑架;31、水轮机;321、转盘;322、推拉杆;41、滑轨;411、倾斜部;42、垃圾清理组件;421、小车;422、聚集架;423、托架;4241、滑块;4242、拉索;4243、伸缩弹簧;5、落料开关;51、顶杆;52、压缩弹簧;531、连杆;532、曲轴;533、凸轮;534、
击打锤;535、拉力弹簧;6、垃圾拦截网。
具体实施方式
29.以下结合附图1-3对本技术作进一步详细说明。
30.本技术实施例公开一种河涌智能清污及监控系统。参照图1,一种河涌智能清污及监控系统,包括水闸1、水力驱动装置、垃圾清理装置和监控装置,水闸1建设在河涌的下游,水闸1设有连通水道,水道连通水闸1的两端,在水闸1的上游河涌中设有横跨河涌的垃圾拦截网6,垃圾拦截网6由钢条连接成网状,垃圾拦截网6上涂覆有防止钢丝生锈的防锈层。支撑架2固定于水闸1和河涌两岸的地面上,水力驱动装置安装于水道和水道的上方,垃圾清理装置安装于支撑架2上,水力驱动装置将水流的动力转化为机械动能,再将机械动能传递给垃圾清理装置,驱动垃圾清理装置对垃圾拦截网6处的垃圾进行清理。监控装置监控拦截网是否被堵塞,以便工作人员能够快速获知垃圾是否被清理。
31.参照图1,水力驱动装置包括水轮机31和传动组件,水轮机31安装于水道中,水轮机31的转轴竖直向上设置,水轮机31的转轴连接传动组件,水轮机31将水流的动力转化为机械能,传动组件将水轮机31的机械动能传递给垃圾清理装置。垃圾清理装置包括滑轨41、垃圾清理组件42,滑轨41为对称件,垃圾清理组件42滑动安装于滑轨41上。滑轨41水平设于垃圾拦截网6的上方并与拦截网平行,滑轨41固定于支撑架2的上端,滑轨41横跨河涌,滑轨41的两端延伸到河涌的两岸的上方,滑轨41的两端分别设有一段往上倾斜的倾斜部411,倾斜部411能带动垃圾清理组件42往上提升离开水面,使得垃圾清理组件42能够从两岸的地面上方通过。垃圾清理组件42往下延伸到垃圾拦截网6的上游一侧的河水中,传动组件连接垃圾清理组件42并带动垃圾清理组件42沿滑轨41往复运动,滑轨41的两端分别设有使垃圾清理组件42上的垃圾落下的落料开关5。滑轨41的中间位置设有一个斜坡,斜坡高5mm,斜坡的坡度为5
°
,斜坡由中间往滑轨41的两侧倾斜。
32.传动组件包括转盘321和推拉杆322,转盘321水平设置,转盘321设于滑轨41的下游侧,转盘321固定连接于水轮机31的转轴,水轮机31的转轴通过轴承转动连接支撑架2,减少水轮机31的转轴的震动和摇摆。推拉杆322的一端通过万向接头连接于转盘321的外周,万向接头能够使得推拉杆322朝任意方向转动,转盘321带动推拉杆322连接转盘321的一端做圆周运动,推拉杆322转动到与滑轨41垂直的位置时,推拉杆322处于转盘321的圆心的正上方,推杆的运动轨迹相对于滑轨41的中心对称,推拉杆322远离转盘321的一端通过万向接头连接垃圾清理组件42,推拉杆322带动垃圾清理组件42做往复运动。
33.参照图2,垃圾清理组件42包括一个小车421、一个聚集架422、两个托架423和联动结构,小车421安装于滑轨41上并能够沿滑轨41运动,斜坡有利于小车421由滑轨41的一侧运动到滑轨41中间位置时,随自身惯性往滑轨41的另一侧运动。聚集架422和托架423上安装有滤网,聚集架422竖直设于小车421的下方,聚集架422的宽度方向与水流方向相同,聚集架422的上端固定连接小车421,聚集架422靠近垃圾拦截网6的一端设有刷子,小车421带动聚集架422沿滑轨41往复运动,刷子抵接垃圾拦截网6,筛子来回对垃圾拦截网6进行刷洗,保持垃圾拦截网6的网孔畅通。托架423水平设置,两个托架423分别通过转动轴转动安装于聚集架422的下端的两侧,转动轴转动连接聚集架422,托架423固定于转动轴上,转动轴外套设有复位弹簧,复位弹簧的两端分别固定连接托架423和聚集架422,托架423对聚集
架422聚集的垃圾进行托举,阻挡垃圾从下方掉落到河底,保持垃圾与聚集架422同步运动,将垃圾带出河涌。联动结构连接托架423,落料开关5通过联动机构驱动托架423转动。
34.参照图2,联动结构包括两块滑块4241和两条拉索4242,两块滑块4241分别滑动安装于小车421的两端,滑块4241能够沿着小车421运动的方向在小车421上滑动,滑块4241与小车421之间设有伸缩弹簧4243,伸缩弹簧4243的两端分别固定连接两块滑块4241,伸缩弹簧4243用于小车421自动复位。其中一根拉索4242连接左侧的托架423和左侧的滑块4241,另一根拉索4242连接右侧的托架423和右侧的滑块4241,拉索4242从聚集架422的内部穿过,拉索4242的护套固定于聚集架422上和小车421,拉索4242的钢丝的下端设于托架423的下方并固定连接托架423远离聚集架422的一端,拉索4242的钢丝的上端固定连接滑块4241,小车421的两端分别设有导向轮,拉索4242的钢丝的上端环绕导向轮后再固定到滑块4241上。拉索4242的护套的上端固定于小车421的一端,滑块4241往后滑动过程中拉紧拉索4242的钢丝,带动托架423由水平状态转动到竖直状态,滑块4241复位过程中放松拉索4242的钢丝,托架423在复位弹簧的作用下由竖直状态转动到水平状态。
35.参照图3,落料开关5包括顶杆51,顶杆51水平设于滑轨41的两端,顶杆51外套设有套筒,套筒固定于支撑架2,顶杆51滑动连接套筒。顶杆51外套设有压缩弹簧52,压缩弹簧52设于套筒远离小车421的一端,压缩弹簧52的两端分别固定连接套筒和顶杆51,压缩弹簧52用于顶杆51的复位,顶杆51远离滑块4241的一端连接有用于击打聚集架422的击打结构。小车421运动到顶杆51处时,滑块4241与顶杆51接触并推动顶杆51向前滑动,压缩弹簧52被压缩,对顶杆51产生一个向后的作用力,顶杆51对滑块4241产生一个向后的作用力,推动滑块4241向小车421运动方向的后方运动,带动托架423转动;同时顶杆51的向前运动带动击打结构击打在聚集架422上,使得聚集架422发生震动,将附着在聚集架422上的垃圾震落。
36.参照图3,击打结构包括连杆531、曲轴532、凸轮533和击打锤534,连杆531的两端分别铰接于曲轴532和顶杆51,连杆531与顶杆51不平行,连杆531连接曲轴532的曲柄,曲轴532的两端分别转动安装于支撑架2上。凸轮533固定于曲轴532的一端,凸轮533的轮廓由两个半径不同的半圆面、一个竖直面和一个圆滑过渡面组成,竖直面和圆滑过渡面分别连接两个半圆面,竖直面连接两个半圆面处形成一个半径突变处,在竖直面处,凸轮533的半径由最大半径直接转换到最小半径处。击打锤534的锤柄铰接支撑架2并形成一个杠杆,击打锤534与支撑架2之间设有拉力弹簧535,拉力弹簧535处于拉伸状态,拉力弹簧535设于击打锤534的锤头一端,拉力弹簧535的两端分别固定连接锤柄和支撑架2,击打锤534的锤柄远离锤头的一端抵接于凸轮533的下部,击打锤534的锤头设于聚集架422的上方,滑块4241推动顶杆51,顶杆51推动曲轴532带动凸轮533转动,顶杆51推动曲轴532带动凸轮533由最大半径直接转换到最小半径时,击打锤534的锤柄会突然失去凸轮533的支撑力,在拉力弹簧535的作用下下降,击打在聚集架422上,使得聚集架422产生震动,将聚集架422上的垃圾震落。
37.监控装置包括控制器、显示终端和两个水位监测器,两个水位监测器分别布设于垃圾拦截网6的上游侧和下游侧,两个水位监测器分别连接控制器,控制器连接显示终端。两个水位监测器分别监测垃圾拦截网6的上游侧和下游侧的水位并将监测到的水位信号传递给控制器,控制器接受两个水位监测器传递的信号并根据接收到的信号计算垃圾拦截网6的上游侧和下游侧的水位差值,然后将计算的水位差值与预先设定的水位差临界值进行
对比,若计算得到的水位差值小于水位差临界值,则向显示终端发出垃圾清理正常的显示信号,若计算得到的水位差值大于或等于水位差临界值,则向显示终端发出垃圾清理异常的显示信号,显示终端接收控制器发送来的信号将其转化并显示,以便操作人员直观了解。
38.本技术实施例一种河涌智能清污及监控系统的实施原理为:垃圾拦截网6将河涌中往下游漂的垃圾拦截,聚集在垃圾拦截网6处,水轮机31在水流的带动下转动,通过转盘321和推拉杆322带动小车421沿滑轨41滑动,小车421带动聚集架422和托架423将聚集在垃圾拦截网6处的垃圾捞取,然后在推杆杆的推动下带到滑轨41的一端,在滑轨41的倾斜部411处往上升起,离开水面,沿着倾斜部411上升到河涌的岸上。当小车421运动到滑块4241与顶盖接触时,滑块4241推动顶杆51向前运动,而顶杆51推动滑块4241往后运动,滑块4241往后运动拉紧拉索4242的钢丝,带动托架423由水平状态转向竖直状态,托架423上的垃圾在自身的重力下落到河涌的岸边,顶杆51的向前运动带动曲轴532和凸轮533转动,凸轮533由最大半径直接转换到最小半径时,击打锤534的锤柄会突然失去凸轮533的支撑力,在拉力弹簧535的作用下击打锤534的锤头下降,击打在聚集架422上,使得聚集架422产生震动,将吸附在聚集架422上的垃圾震落。随着水轮机31的继续转动,转盘321和推拉杆322带动小车421沿滑轨41往回运动,聚集架422和托架423将聚集在垃圾拦截网6处的垃圾再次捞取并往河涌的另一侧岸边带,在另一个顶杆51处将垃圾放下,如此往复,自动将河涌往下游漂的垃圾捞取并带到岸边存放,等待工作人员清理。本技术的转盘321在通过推拉杆322带动小车421往复运动的过程中,有时会出现小车421无法由转盘321的一侧运动到另一侧的情况,即小车421只在河涌的一侧往复运动,从而只能带走河涌一侧的垃圾,所以每天需要人工检查一遍小车421对垃圾的清理情况,若发现小车421至在河涌的一侧往复,可以人工推动小车421到河涌的另一侧,即可对河涌另一侧的垃圾进行清理。
39.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。