挖土机
1.本技术是申请号为201711038166.2、申请日为2017年10月30日、发明名称为“挖土机”的申请的分案申请。
技术领域
2.本技术主张基于2016年10月28日于日本技术的日本专利申请第2016-212169号的优先权。该日本技术的全部内容通过参考援用于本说明书中。
3.本发明涉及一种挖土机。
背景技术:
4.公开有如下结构:若通过节流容量阀的操作,从多个作业模式选择任意的作业模式,则根据与所选择的作业模式对应的设定转速而将引擎的转速控制为恒定(例如,参考专利文献1)。
5.专利文献1:日本特开2004-324511号公报
6.然而,在挖土机的作业工序中,作业负荷发生变化,因此有可能在所选择的作业模式与作业负荷之间产生失配。例如,在选择引擎的设定转速较高且优先作业速度的作业模式的情况下,即使作业负荷比较小时,引擎的转速也维持比较高的状态,则在引擎的油耗效率的观点考虑不优选。
技术实现要素:
7.鉴于上述课题,提供一种能够改善引擎的油耗效率的挖土机。
8.为了实现上述目的,在一实施方式中,提供一种挖土机,其具备:
9.引擎;
10.液压泵,通过所述引擎来驱动;
11.液压驱动器,通过从所述液压泵供给的工作油来驱动;
12.作业装置,通过所述液压驱动器来驱动;
13.操作装置,操作所述作业装置;及
14.控制部,控制所述引擎的转速,
15.所述控制部根据所述操作装置的操作状态,推测操作人员的操作意向,并根据推测结果,使所述引擎的转速上升。
16.发明的效果
17.根据上述实施方式,能够提供一种能够改善引擎的油耗效率的挖土机。
附图说明
18.图1是表示挖土机的一例的侧视图。
19.图2是表示挖土机的液压系统的结构的一例的结构图。
20.图3是对挖土机的一系列的作业流程进行说明的图。
21.图4是表示主泵的吐出压力与流量之间的关系的图。
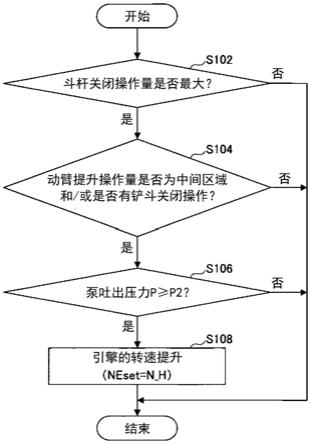
22.图5是示意地表示基于控制器的引擎转速提升处理的一例的流程图。
23.图6是示意地表示基于控制器的引擎转速下降处理的一例的流程图。
24.图7是示意地表示基于控制器的引擎转速提升处理的另一例的流程图。
25.图8是示意地表示基于控制器的引擎转速下降处理的另一例的流程图。
26.图9是示意地表示基于控制器的引擎转速提升处理的变形例的流程图。
27.图10是表示根据基于控制器的控制处理的引擎的转速及输出的时间变化的一例的时序图。
28.符号的说明
29.4-动臂(作业装置),5-斗杆(作业装置),6-铲斗(作业装置),7-动臂缸(液压驱动器),8-斗杆缸(液压驱动器),9-铲斗缸(液压驱动器),11-引擎,12l、12r-主泵(液压泵),16-操作装置,16a-动臂操作杆,16b-斗杆操作杆,16c-铲斗操作杆,30-控制器(控制部)。
具体实施方式
30.以下,参考附图,对用于实施本发明的方式进行说明。
31.首先,参考图1、图2,对本实施方式所涉及的挖土机的结构进行说明。
32.图1是表示本发明的实施方式所涉及的挖土机的侧视图。
33.本实施方式所涉及的挖土机具备:下部行走体1;经由回转机构2而可回转地搭载于下部行走体1的上部回转体3;作为作业装置的动臂4、斗杆5及铲斗6;驾驶室10,供操作人员搭乘。
34.下部行走体1例如包括左右1对履带,通过每个履带被行走液压马达20l、20r(参考图2)液压驱动,使挖土机行走。
35.上部回转体3通过被回转液压马达21(参考图2)驱动,相对于下部行走体1进行回转。
36.动臂4以能够俯仰的方式轴支于上部回转体3的前部中央,在动臂4的前端以能够上下转动的方式轴支有斗杆5,在斗杆5的前端以能够上下转动的方式轴支有铲斗6。动臂4、斗杆5及铲斗6分别通过动臂缸7、斗杆缸8及铲斗缸9被分别液压驱动。
37.驾驶室10搭载于上部回转体3的前部左侧。
38.图2是表示本实施方式所涉及的挖土机的液压系统及控制系统的结构的一例的示意图。
39.另外,图中,机械动力系统由双重线表示,高压液压管路由实线表示,先导管路由虚线表示,电力驱动、控制系统由点线表示。
40.本实施方式所涉及的挖土机的液压系统中的液压驱动系统包括引擎11、主泵12、调节器13、中心旁通油路40(40l、40r)、并联油路41(41l、41r)、直行阀150、流量控制阀151~158。并且,本实施方式所涉及的挖土机的液压系统中的液压驱动系统包括作为分别驱动下部行走体1、上部回转体3、动臂4、斗杆5及铲斗6的液压驱动器的行走液压马达20(20l、20r)、回转液压马达21、动臂缸7、斗杆缸8、铲斗缸9。
41.引擎11是挖土机的驱动力源,驱动主泵12(12l、12r)、先导泵14。引擎11例如是以柴油作为燃料的柴油引擎,搭载于上部回转体3的后部。
42.如上所述,主泵12被引擎11驱动,并向液压驱动器供给工作油。主泵12包括主泵12l、12r。主泵12l向中心旁通油路40l吐出从工作油罐(未图示)吸入的工作油,使工作油经过中心旁通油路40l而循环至工作油罐。主泵12r向中心旁通油路40r吐出从工作油罐吸入的工作油,使工作油经过中心旁通油路40r而循环至工作油罐。
43.调节器13在控制器30的控制(例如,总马力控制、负控制(负控)等)下,根据主泵12的吐出压力,调整主泵12的斜板的倾斜角,并控制主泵12的吐出量。具体而言,如后述,调节器13根据从控制器30所控制的减压阀50导入的工作油的压力,调整主泵12的斜板的倾斜角。调节器13包括分别与主泵12l、12r对应的调节器13l、13r。
44.中心旁通油路40包括中心旁通油路40l、40r。中心旁通油路40l连通流量控制阀151、153、155、157,并与工作油罐连接。中心旁通油路40r连通直行阀150、流量控制阀152、154、156、158,并与工作油罐连接。
45.并联油路41包括并联油路41l、41r。并联油路41l在流量控制阀151的上游(配置有主泵12l的一侧)从中心旁通油路40l分支,且并列地对流量控制阀151、153、155、157供给工作油。并联油路41r在直行阀150的上游(配置有主泵12r的一侧)从中心旁通油路40r分支,且并列地对流量控制阀152、154、156、158供给工作油。
46.直行阀150是用于确保复合操作时(具体而言,同时进行下部行走体1的操作和作业装置的操作时)的下部行走体1的直行性的滑阀。直行阀150通常仅进行将并联油路41l及中心旁通油路40r的工作油排出到下游的动作。另一方面,复合操作时,直行阀150在流量控制阀152、154、156、158的上游将并联油路41l中的流量控制阀151的下游的工作油导入中心旁通油路40r,并且将中心旁通油路40r中的流量控制阀152、154、156、158的上游的工作油导入并联油路41l中的流量控制阀153、155、157的上游。由此,在复合操作时,控制行走液压马达20l、20r的流量控制阀151、152中,均被供给来自主泵12l的工作油,因此确保下部行走体1的直进性。
47.流量控制阀151、152是分别向行走液压马达20l、20r供给从主泵14l、14r吐出的工作油,并且将行走液压马达20l、20r内的工作油排出到工作油罐的滑阀。滑轴在从设置于驾驶室10内的行走操作用的操纵杆或者踏板(未图示)供给的先导压力的作用下进行移动。流量控制阀151、152根据滑轴的位置,控制供排到行走液压马达20l、20r的工作油的流量及流动的方向。
48.流量控制阀153、154是向动臂缸7供给从主泵14l、14r吐出的工作油,并且将动臂缸7内的工作油排出到工作油罐的滑阀。滑轴在从设置于驾驶室10内的动臂操作杆16a供给的先导压力的作用下进行移动。流量控制阀153、154根据滑轴的位置,控制供排到动臂缸7的工作油的流量及流动的方向。
49.流量控制阀155、156是向斗杆缸8供给从主泵14l、14r吐出的工作油,并且将斗杆缸8内的工作油排出到工作油罐的滑阀。滑轴在从设置于驾驶室10内的斗杆操作杆16b供给的先导压力的作用下进行移动。流量控制阀155、156根据滑轴的位置,控制供排到斗杆缸8的工作油的流量及流动的方向。
50.流量控制阀157是利用回转液压马达21使从主泵12l吐出的工作油循环的滑阀。滑轴在从设置于驾驶室10内的回转操作用的操纵杆(未图示)供给的先导压力的作用下进行移动。流量控制阀157根据滑轴的位置,控制供排到回转液压马达21的工作油的流量及流动
的方向。
51.流量控制阀158是用于向铲斗缸9供给从主泵12r吐出的工作油,并且将铲斗缸9内的工作油排出到工作油罐的滑阀。滑轴在从设置于驾驶室10内的铲斗操作杆16c供给的先导压力的作用下进行移动。流量控制阀158根据滑轴的位置,控制供排到铲斗缸9的工作油的流量及流动的方向。
52.并且,在本实施方式所涉及的挖土机的液压系统中的液压先导系统中包括先导泵14、操作装置16、减压阀50。
53.先导泵14例如为固定容量式液压泵,如上所述,被引擎11驱动。先导泵14通过先导管路向操作装置16、减压阀50等供给工作油。
54.操作装置16是用于操作包括下部行走体1、上部回转体3及作业装置(动臂4、斗杆5、铲斗6)等在内的挖土机的各种动作要件的操作输入机构。操作装置16包括动臂操作杆16a、斗杆操作杆16b、铲斗操作杆16c。
55.动臂操作杆16a是用于使动臂4提升下降的操作输入机构。动臂操作杆16a利用从先导泵14吐出的工作油,产生与操纵杆操作量相应的液压(压力信号),并作用于流量控制阀154的左右任一个先导端口。
56.斗杆操作杆16b是用于开闭斗杆5的操作输入机构。斗杆操作杆16b利用从先导泵14吐出的工作油,产生与操纵杆操作量相应的液压(压力信号),并作用于流量控制阀155的左右任一个先导端口。
57.铲斗操作杆16c是用于开闭铲斗6的操作输入机构。铲斗操作杆16c利用从先导泵14吐出的工作油,产生与操纵杆操作量相应的液压(压力信号),并作用于流量控制阀158的左右任一个先导端口。
58.减压阀50包括与调节器13l、13r对应的减压阀50l、50r。减压阀50l在控制器30的控制下,将从先导泵14吐出的工作油减压到所期望的压力(设定压力),并作用于调节器13l。同样,减压阀50r在控制器30的控制下,将从先导泵14吐出的工作油减压到所期望的压力(设定压力),并作用于调节器13r。由此,控制器30能够通过减压阀50l、50r,控制作用于调节器13l、13r的压力,并调整主泵12l、12r的斜板倾斜角。减压阀50l、50r根据来自控制器30的控制指令,在主泵12l、12r的吐出压力成为规定值以上的情况下,减少主泵12l、12r的吐出量,以便由吐出压力与吐出量的乘积所表示的泵马力不超过引擎11的马力(总马力控制)。
59.另外,减压阀50(50l、50r)可以是电磁比例阀。
60.并且,本实施方式所涉及的挖土机的控制系统包括压力传感器17、动臂缸压力传感器18a、吐出压力传感器18b、控制器30、ecm60、模式调节旋钮70等。
61.压力传感器17检测从操作装置16输出的工作油的压力,即与操作装置16中的操作量对应的工作油的压力。压力传感器17包括分别与动臂操作杆16a、斗杆操作杆16b、铲斗操作杆16c对应的压力传感器17a、17b、17c。
62.压力传感器17a检测在从动臂操作杆16a输出的工作油中,与动臂操作杆16a的动臂提升操作的操作量对应的工作油的压力,并向控制器30发送检测信号(检测值)。
63.另外,压力传感器17a也可以是能够检测在从动臂操作杆16a输出的工作油中,与动臂操作杆16a的动臂下降操作的操作量对应的工作油的压力的结构。
64.压力传感器17b检测在从斗杆操作杆16b输出的工作油中,与斗杆操作杆16b的斗杆关闭操作的操作量对应的工作油的压力,并向控制器30发送检测信号(检测值)。
65.另外,压力传感器17b也可以是能够检测与斗杆操作杆16b的斗杆打开操作的操作量对应的、从斗杆操作杆16b输出的工作油的压力的结构。
66.压力传感器17c检测与铲斗操作杆16c的铲斗关闭操作的操作量对应的、从铲斗操作杆16c输出的工作油的压力,并向控制器30发送检测信号(检测值)。
67.另外,压力传感器17c可以检测在从铲斗操作杆16c输出的工作油中,与铲斗操作杆16c的铲斗打开操作的操作量对应的工作油的压力。
68.动臂缸压力传感器18a检测动臂缸的缸底侧的压力,并向控制器30发送检测信号(检测值)。
69.吐出压力传感器18b设置有2个,检测各主泵12l、12r的吐出压力,并向控制器30发送检测信号(检测值)。
70.控制器30进行挖土机的控制系统的各种控制处理。控制器30的功能可以通过任意的硬件、软件,或者其组合来实现,例如,将以cpu、ram、rom、i/o为中心的微型计算机设为中心的方式构成。例如,控制器30根据从吐出压力传感器18b接收的主泵12l、12r的吐出压力的检测值、从负控压力传感器(未图示)接收的负控压力的检测值,向减压阀50l、50r发送控制指令,并进行主泵12l、12r的总马力控制、负控控制。并且,例如,控制器30根据操作装置16的操作状态及由模式调节旋钮70所选择的作业模式,向进行引擎11的作动控制的ecm70发送控制指令,并进行根据设定转速neset将引擎11的转速维持为恒定的控制(定速控制)。具体而言,当操作装置16未操作下部行走体1、上部回转体3、作业装置(动臂4、斗杆5、铲斗6)等时(操作时),控制器30将引擎11的设定转速neset设定为比较高的规定转速ne_h或者中间程度的规定转速ne_m(<ne_h)。另一方面,当操作装置16操作下部行走体1、上部回转体3、作业装置(动臂4、斗杆5、铲斗6)等时(非操作时),控制器30将引擎11的设定转速neset设定为比较低的规定转速ne_l(省油耗控制)。关于控制器30对引擎11的转速的控制的详细内容将后述。
71.另外,规定转速ne_h、ne_m、ne_l根据由模式调节旋钮70所选择的作业模式而有所不同。
72.ecm60例如通过向燃料喷射装置等发送控制指令,而进行引擎11的作动控制。
73.模式调节旋钮70是选择与引擎11的设定转速neset对应的挖土机的作业模式的操作机构。在挖土机的作业模式中,包括引擎11的设定转速neset较高且优先作业速度的sp(super power,超级功率)模式、引擎11的设定转速neset在中间程度且最适合作业负荷较高的重作业的h(heavy,重型)模式、引擎11的设定转速neset较低且对应于范围广泛的作业的a(auto,自动)模式等。
74.另外,在a模式与怠速模式之间,模式调节旋钮70还能够选择比a模式更加低的设定转速neset。
75.接着,参考图3,对挖土机的作业工序进行说明。
76.图3是表示挖土机的作业工序的一例的图,具体而言,是表示深挖挖掘、装载动作时的作业工序的图。具体而言,图3(a)~图3(d)表示挖掘动作区间,图3(e)表示动臂提升动作区间,图3(f)表示翻卸动作区间,图3(g)表示动臂下降动作区间。
77.首先,如图3(a)所示,在作业装置(动臂4、斗杆5、铲斗6)的作业区域n内,操作人员进行定位,以便铲斗6的前端成为挖掘对象的所期望的高度位置。而且,如图3(b)所示,在打开铲斗6的状态下,操作人员通过逐渐提升动臂4且关闭斗杆5,而开始挖掘动作。以下,将图3(a)、图3(b)的动作状态称为挖掘动作区间中的挖掘动作前半部分。
78.接着,如图3(c)所示,操作人员通过从图3(b)的状态进一步地逐渐提升动臂4且关闭斗杆5,而挖掘土满满地容纳于铲斗6内。而且,如图3(d)所示,操作人员通过一边进一步关闭斗杆5,一边关闭铲斗6,向空中抬起容纳有挖掘土的铲斗6。以下,将图3(c)、图3(d)的动作状态称为挖掘动作区间中的挖掘动作后半部分。
79.挖掘动作区间中,在挖掘动作前半部分,挖土机处于作业负荷(即,主泵12l、12r的吐出压力)比较低的轻负荷状态。另一方面,在挖掘动作后半部分,从地面(挖掘土)被输入至铲斗6的力变大,因此需要高马力,挖土机的作业负荷成为比较高的高负荷状态。
80.接着,如图3(e)所示,操作人员将动臂4提升至铲斗6的底部距地面成为所期望的高度为止。所期望的高度例如是指翻卸的高度以上的位置。续于此,或者同时,操作人员将上部回转体3如箭头ar1所示那样进行回转,并将铲斗6移动至排土的位置。在动臂4的提升动作的初期,需要高马力,挖土机的作业负荷处于比较高的高负荷状态,随着动臂4提升(包括与回转动作的复合动作),所需要的马力逐渐变小,挖土机向作业负荷比较低的轻负荷状态过渡。
81.接着,如图3(f)所示,操作人员打开斗杆5及铲斗6,并排出铲斗6内的土。并且,操作人员可以仅打开铲斗6而进行排土。在翻卸动作区间,所需要的马力低,挖土机的作业负荷处于比较低的轻负荷状态。
82.接着,如图3(g)所示,操作人员将上部回转体3如箭头ar2所示那样进行回转,并将铲斗6移动至挖掘位置的正上方。此时,操作人员在进行回转的同时下降动臂4,并将铲斗6下降至距挖掘对象成为所期望的高度,并再次进行挖掘动作。在动臂下降回转动作区间,所需要的马力比翻卸动作区间所需要的马力更低,挖土机处于作业负荷非常低的轻负荷状态。
83.操作人员一边将挖掘动作、动臂提升动作、翻卸动作、动臂下降动作设为1个周期而重复进行,一边推进深挖挖掘、装载动作。
84.接着,参考图4,对以图3的挖土机的作业工序作为前提的引擎11的控制的概要进行说明。
85.图4是表示主泵12(12l、12r)的压力(吐出压力)p与流量(吐出量)q之间的关系的图(p-q线图)。
86.另外,图中,曲线l1表示引擎11的设定转速neset为规定转速ne_h时的吐出压力p与吐出量q之间的关系,曲线l2表示引擎11的设定转速neset为规定转速ne_m时的吐出压力p与吐出量q之间的关系。并且,图中,规定压力p2是比与曲线l1中的主泵12的轻负荷状态与高负荷状态的边界对应的吐出压力p即规定压力p1小,且吐出压力p超过规定压力p1,主泵12到达高负荷状态之前的轻负荷状态时的吐出压力p。
87.以往,若通过模式调节旋钮70来设定作业模式,则根据与作业模式相应的恒定的设定转速neset进行引擎11的控制。此时,如上所述,在挖土机的作业工序中,由于存在低负荷状态和高负荷状态,因此设定为能够从主泵12输出在高负荷状态下所需要的马力的比较
高的设定转速neset(即,相当于规定转速ne_h的设定转速neset)。因而,在轻负荷状态下,主泵12的吸收马力所需以上地变大,因此主泵12的吐出量较多,作业装置的速度变快,由此操作性变差,或者归根结底引擎11的油耗变差。
88.相对于此,本实施方式中,设置作为与挖土机的轻负荷状态对应的设定转速neset的规定转速ne_m及作为与挖土机的高负荷状态对应的设定转速neset的规定转速ne_h(>ne_m)。由此,在轻负荷状态下,主泵12的吸收马力被抑制,因此能够防止操作性的恶化,并且能够使引擎11的设定转速neset设为比高负荷状态小,因此能够实现引擎11的油耗改善。
89.具体而言,如图4的曲线l2所示,在设定转速neset被设定为规定转速ne_m的状态下,控制器30通过控制调节器13,在吐出压力p为规定压力p1以下的轻负荷状态下,相对于吐出压力p的上升,将吐出量q维持为一定。另一方面,在吐出压力p超过规定压力p1的高负荷状态下,控制器30以相对于吐出压力p的上升而逐渐降低吐出量q的方式,使由吐出压力p和吐出量q的乘积表示的主泵12的吸收马力不超过引擎11的输出。即,相对于吐出压力p的上升,曲线l2的规定压力p1是与吐出量q一定的状态(主泵12的轻负荷状态)和吐出量q减少的状态(主泵12的高负荷状态)的边界(拐点)对应的吐出压力p,与曲线p-q线图的拐点对应。此时,在轻负荷状态下,主泵12的吐出压力p提高至比规定压力p1低的规定压力p2以上的情况下,控制器30判断为挖土机向高负荷状态过渡的可能性较高。并且,同时在根据操作装置16的操作状态能够判断为与上述挖掘动作或者动臂提升回转动作区间对应的操作人员的操作正在进行的情况下,控制器30判断为挖土机向高负荷状态过渡的可能性较高。即,控制器30根据主泵12的吐出压力和操作装置16的操作状态,判断挖土机从低负荷状态向高负荷状态过渡,并将引擎11的设定转速neset从规定转速ne_m提升至规定转速ne_h。由此,主泵12的吐出压力p与吐出量q之间的关系(p-q线图)从曲线l2向曲线l1过渡,随着引擎11的输出增加,对于相同的吐出压力p的吐出量q增加。因此,挖土机能够适当地执行与高负荷状态对应的作业(挖掘动作后半部分、动臂提升回转动作)。
90.接着,参考图5~图9,对控制器30的具体的控制处理的详细内容进行说明。
91.首先,图5是示意地表示控制器30将引擎11的设定转速neset从规定转速ne_m提升至规定转速ne_h的处理(引擎转速提升处理)的一例的流程图。在挖土机运行的过程中,在设定转速neset被设定为规定转速ne_m的情况下,重复执行基于本流程图的处理。
92.另外,若操作人员开始进行使用了操作装置16的挖土机的操作,则控制器30首先将引擎11的设定转速neset从与省油耗控制对应的规定转速ne_l提升至规定转速ne_m。
93.在步骤s102中,控制器30根据压力传感器17b的检测值,判定斗杆操作杆16b的斗杆关闭操作量是否最大(全行程的操作量)。在斗杆关闭操作量最大的情况下,控制器30进入步骤s104,并非该情况时,结束本次处理。
94.另外,在步骤s102的处理中,只要能够判断操作人员对操作装置16进行的操作是否为作业装置的作业负荷变高的方向即可。因此,控制器30无需一定判定斗杆关闭操作量是否最大,也可以判定是否为比较大的操作量(例如,为全行程的至少80%以上)。
95.在步骤s104中,控制器30根据压力传感器17a、17c的检测值,判定动臂操作杆16a的动臂提升操作量与中间区域对应的情况及铲斗操作杆16c的铲斗关闭操作正在进行的情况中的至少一个情况是否成立。其中,中间区域是指,操作量为零与操作量为最大之间的中间附近的规定范围(例如,全行程的30%~70%之间的范围)。在该判定条件成立的情况下,
控制器30进入步骤s106,并非该情况时,结束本次处理。即,在步骤s102、104的判定条件成立的情况下,控制器30判断为操作人员正在进行意图挖掘动作的操作,并进入步骤s106。
96.在步骤s106中,控制器30根据吐出压力传感器18b的检测值,判定主泵12的吐出压力p是否为规定压力p2以上。此时,控制器30也可以判定主泵12l、12r这两方的吐出压力p是否为规定压力p2以上,控制器30也可以判定至少一方的吐出压力是否为规定压力p2以上,选择哪一个适当确定即可。主泵12的吐出压力p为规定压力p2以上的情况下,控制器30判断为存在挖土机从低负荷状态向高负荷状态过渡的可能性,并进入步骤s108,并非该情况时,结束本次处理。
97.即,在步骤s102~s106中,控制器30推测使用了操作装置16的操作人员对作业装置(动臂4、斗杆5、及铲斗6)朝向高负荷状态的操作。具体而言,控制器30判断操作人员对操作装置16进行的操作是否为作业装置的作业负荷变高的方向(例如,动臂4的提升方向、斗杆5的关闭方向、铲斗6的关闭方向)(步骤s102、s104)。而且,若控制器30判断为操作人员对操作装置16进行的操作为作业装置的作业负荷变高的方向(步骤s102的“是”、s104的“是”),则在该操作过程中,主泵12的吐出压力p为规定压力p2以上的情况下,判断为存在挖土机从低负荷状态向高负荷状态过渡的可能性(步骤s106的“是”)。如此,作为推测出操作人员对操作装置16的操作意向的推测结果,控制器30判断对操作装置16进行的操作是否为作业装置的作业负荷变高的方向。尤其,本例子中,控制器30判断操作人员对操作装置16的操作意向是否与挖土机的挖掘动作后半部分的工序对应。
98.在步骤s108中,控制器30将引擎11的设定转速neset从规定转速ne_m设定变更为规定转速ne_h,使引擎11的转速上升,从而结束本次处理。
99.接着,图6是示意地表示控制器30将引擎11的设定转速neset从规定转速ne_h下降至规定转速ne_m的处理(引擎转速下降处理)的一例的流程图。具体而言,是在图5的处理中将被设定为规定转速ne_h的设定转速neset还原到规定转速ne_m的处理。在挖土机运行的过程中,在引擎11的设定转速neset通过图5的处理被设定为规定转速ne_h的情况下,重复执行基于本流程图的处理。
100.在步骤s202中,控制器30根据压力传感器17b的检测值,判定斗杆操作杆16b的斗杆关闭操作量是否为中间区域的规定量(例如,为全行程的50%)以上(即,半行程以上)。在斗杆关闭操作量并非半行程以上的情况下,控制器30判断为挖土机的挖掘动作结束,并进入步骤s204,在斗杆关闭操作量为半行程以上的情况下,控制器30判断为挖土机的挖掘动作继续,从而结束本次处理。
101.在步骤s204中,控制器30将引擎11的设定转速neset从规定转速ne_h设定变更为规定转速ne_m,使引擎11的转速下降,从而结束本次处理。
102.接着,图7是表示基于控制器30的引擎转速提升处理的另一例的图。与图5的情况相同,在挖土机运行的过程中,在设定转速neset被设定为规定转速ne_m的情况下,重复执行基于本流程图的处理。
103.在步骤s302中,控制器30根据压力传感器17a的检测值,判定动臂操作杆16a的动臂提升操作量是否最大(全行程的操作量)。在动臂提升操作量最大的情况下,控制器30判断为动臂提升动作正在进行,并进入步骤s304,并非该情况时,结束本次处理。
104.另外,步骤s302的处理中,只要能够判断操作人员对操作装置16进行的操作是否
为作业装置的作业负荷变高的方向即可。因此,控制器30无需一定判定动臂提升操作量是否最大,可以判定是否为比较大的操作量(例如,为全行程的至少80%以上)。
105.在步骤s304中,控制器30根据吐出压力传感器18b的检测值,判定主泵12的吐出压力p是否为规定压力p2以上。此时,与图5的步骤s106的情况相同,控制器30也可以判定主泵12l、12r这两方的吐出压力p是否为规定压力p2以上,控制器30也可以判定至少一方的吐出压力是否为规定压力p2以上,选择哪一个适当确定即可。主泵12的吐出压力p为规定压力p2以上的情况下,控制器30判断为存在挖土机从低负荷状态向高负荷状态过渡的可能性,并进入步骤s306,并非该情况时,结束本次处理。
106.即,在步骤s302、s304中,控制器30推测使用了操作装置16的操作人员对作业装置(动臂4、斗杆5、及铲斗6)朝向高负荷状态的操作。具体而言,控制器30判断操作人员对操作装置16进行的操作是否为作业装置的作业负荷变高的方向(例如,动臂4的提升方向)(步骤s302)。而且,若控制器30判断为操作人员对操作装置16进行的操作为作业装置的作业负荷变高的方向(步骤s302的“是”),则在该操作过程中,主泵12的吐出压力p为规定压力p2以上的情况下,判断为存在挖土机从低负荷状态向高负荷状态过渡的可能性(步骤s304的“是”)。如此,与图5的情况相同,作为推测出操作人员对操作装置16进行的操作意向的推测结果,控制器30判断对操作装置16进行的操作是否为作业装置的作业负荷变高的方向。尤其,本例子中,控制器30判断操作人员对操作装置16进行的操作意向是否与挖土机的动臂提升动作的工序对应。
107.另外,在步骤s304的处理中,若为比规定压力p1小,且能够判断是否为吐出压力p超过规定压力p1而向高负荷状态过渡的压力值,则控制器30可以使用与规定压力p2不同的压力值进行判定处理。并且,控制器30可以根据动臂缸压力传感器18a的检测值,判断是否存在挖土机从低负荷状态向高负荷状态过渡的可能性。并且,步骤s304的处理可以省略。这是因为,通常在动臂提升操作量最大的情况下,挖土机从低负荷状态向高负荷状态的过渡的情况是显而易见的。
108.在步骤s306中,控制器30将引擎11的设定转速neset从规定转速ne_m设定变更为规定转速ne_h,使引擎11的转速上升,从而结束本次处理。
109.接着,图8是示意地表示控制器30将引擎11的设定转速neset从规定转速ne_h下降至规定转速ne_m的处理(引擎转速下降处理)的另一例的流程图。具体而言,是在图7的处理中将被设定为规定转速ne_h的设定转速neset还原至规定转速ne_m的处理。在挖土机运行的过程中,在引擎11的设定转速neset通过图5的处理被设定为规定转速ne_h的情况下,重复执行基于本流程图的处理。
110.在步骤s402中,控制器30根据压力传感器17a的检测值,判定动臂操作杆16a的操作量是否最大(全行程的操作量)。在动臂提升操作量不是最大的情况下,控制器30判断为动臂提升动作结束,并进入步骤s404,并非该情况时,控制器30判断为动臂提升动作继续,从而结束本次处理。
111.另外,步骤s402的处理中,只要能够判断操作人员对操作装置16进行的操作是否为作业装置的作业负荷变高的方向即可。因此,控制器30无需一定判定动臂提升操作量是否最大,可以判定是否为比较大的操作量(例如,为全行程的至少80%以上)。
112.在步骤s404中,控制器30将引擎11的设定转速neset从规定转速ne_h设定变更为
规定转速ne_m,使引擎11的转速下降,从而结束本次处理。
113.接着,图9是示意地表示基于控制器30的引擎转速提升处理的变形例的流程图。具体而言,是将图7所示的引擎转速提升处理中的步骤s302的处理替换为步骤s502的处理的变形例。与图5、图7的情况相同,在挖土机运行的过程中,在设定转速neset被设定为规定转速ne_m的情况下,重复执行基于本流程图的处理。
114.在步骤s502中,控制器30根据压力传感器17a的检测值,判定动臂操作杆16a的动臂提升操作速度是否为规定阈值以上。规定阈值作为能够判断为挖土机正在进行动臂提升动作的值而被预先规定。在动臂提升操作速度为规定阈值以上的情况下,控制器30判断为正在进行动臂提升动作,并进入步骤s504,并非该情况时,结束本次处理。
115.在步骤s504中,与步骤s304相同,控制器30根据吐出压力传感器18b的检测值,判定主泵12的吐出压力p是否为规定压力p2以上。在主泵12的吐出压力p为规定压力p2以上的情况下,控制器30判断为存在挖土机从低负荷状态向高负荷状态过渡的可能性,并进入步骤s506,并非该情况时,结束本次处理。
116.即,在步骤s502、s504中,与步骤s302、s304的情况相同,控制器30推测使用了操作装置16的操作人员对作业装置(动臂4、斗杆5、及铲斗6)朝向高负荷状态的操作。具体而言,控制器30判断操作人员对操作装置16进行的操作是否为作业装置的作业负荷变高的方向(例如,动臂4的提升方向)(步骤s502)。而且,若控制器30判断为操作人员对操作装置16进行的操作为作业装置的作业负荷变高的方向(步骤s502的“是”),则在该操作过程中,主泵12的吐出压力p为规定压力p2以上的情况下,判断为存在挖土机从低负荷状态向高负荷状态过渡的可能性(步骤s504的“是”)。如此,与图5、图7的情况相同,作为推测出操作人员对操作装置16的操作意向的推测结果,控制器30判断对操作装置16进行的操作是否为作业装置的作业负荷变高的方向。尤其,本例子中,与图7的情况相同,控制器30判断操作人员对操作装置16的操作意向是否与挖土机的动臂提升动作的工序对应。
117.另外,在步骤s504的处理中,若为比规定压力p1小,且能够判断是否为吐出压力p超过规定压力p1而向高负荷状态过渡的压力值,则控制器30可以使用与规定压力p2不同的压力值进行判定处理。并且,与步骤s304相同,控制器30可以根据动臂缸压力传感器18a的检测值,判断是否存在挖土机从低负荷状态向高负荷状态过渡的可能性。并且,与步骤s304相同,步骤s504的处理可以省略。
118.在步骤s506中,与步骤s306相同,控制器30将引擎11的设定转速neset从规定转速ne_m设定变更为规定转速ne_h,使引擎11的转速上升,从而结束本次处理。
119.另外,可以采用上述的图5、图6的组合及图7(或者图9)、图8的组合这两者,也可以采用任一者。并且,采用两者的情况下,并行地执行图5、图7(或者图9)的处理。
120.接着,参考图10,对根据基于控制器30的图5~图8的处理,或者图5、图6、图8、图9的处理的引擎11的转速及输出(马力w)的时间变化进行说明。
121.图10是表示根据基于控制器30的控制处理的引擎11的转速及输出的时间变化的一例的时序图。具体而言,表示挖土机从非操作状态开始进行深挖挖掘、装载动作时的引擎11的转速及输出的时间变化。
122.另外,图中,马力w_l、w_m、w_h分别是与规定转速ne_l、ne_m、ne_h对应的引擎11的输出(马力)。并且,马力w_h、w_m分别与图4(p-q线图)中的曲线l1、l2对应。并且,挖掘动作
前半部分与挖掘动作后半部分的切换是在主泵12的吐出压力p成为规定压力p2以上的时刻。
123.图10所示,在不操作挖土机时,如上所述控制器30进行省油耗控制,因此将引擎11的设定转速neset设定为规定转速ne_l。因此,引擎11的转速被大致维持在规定转速ne_l,并且引擎11的输出也被维持在与规定转速ne_l对应的比较低的马力w_l。
124.之后,从非操作状态操作人员开始进行操作,若向挖掘动作前半部分过渡,则如上所述,控制器30将引擎11的设定转速neset从规定转速ne_l设定变更为规定转速ne_m。并且,在挖掘动作前半部分,从图5的步骤s102、104的处理判断挖掘动作,但主泵12的吐出压力p未达到规定压力p2以上(步骤s106的“否”),从而在图5的处理中,将引擎11的设定转速neset提升至规定转速ne_h的条件不成立。因此,若挖掘动作前半部分开始,则引擎11的转速从规定转速ne_l上升至规定转速ne_m,并被大致维持在规定转速ne_m。并且,引擎11的输出也从比较低的马力w_l上升至与规定转速ne_m对应的中间程度的马力w_m,并被大致维持在马力w_m。
125.之后,若从挖掘动作前半部分向挖掘动作后半部分过渡,则主泵12的吐出压力p达到规定压力p2以上(步骤s106的“是”),从而在图5的处理中,将引擎11的设定转速neset提升至规定转速ne_h的条件成立。因此,若向挖掘动作后半部分过渡,则引擎11的转速从规定转速ne_m上升至规定转速ne_h,并被大致维持在规定转速ne_h。并且,引擎11的输出也从中间程度的马力w_m上升至与规定转速ne_h对应的比较高的马力w_h,并被大致维持在马力w_h。
126.之后,若从挖掘动作后半部分向动臂提升回转动作过渡,则在图6的处理中,从步骤s202的处理判断挖掘动作的结束,引擎11的设定转速neset被设定变更为规定转速ne_m。之后,马上在图7(或者图9)的处理中,从步骤s302(或者s502)的处理判断动臂提升动作,且继续维持主泵12的吐出压力p也为规定压力p2以上的状态(步骤s304、s504的“是”),因此引擎11的设定转速neset再次被设定变更为规定转速ne_h。因此,若向动臂提升动作过渡,则引擎11的转速从挖掘后半部分工序继续被维持在规定转速ne_h,并且引擎11的输出也被维持在与规定转速ne_h对应的比较高的马力w_h。
127.之后,如上所述,动臂提升回转动作中,随着动臂4上升,所需要的马力变小,并且对于动臂操作杆16a的操作量也变小。因而,在动臂提升回转动作的后半部分,在图8的处理中,引擎11的设定转速neset被设定变更为规定转速ne_m。因此,在动臂提升回转动作的后半部分,引擎11的转速从规定转速ne_h下降至规定转速ne_m,并被维持在规定转速ne_m。并且,引擎11的输出也从比较高的马力w_h下降至中间程度的马力w_m,并以马力w_m来维持。
128.之后,翻卸动作及动臂下降回转动作中,通过图5、图7(或者图9)的处理而未满足使设定转速neset上升至规定转速ne_h的条件,因此引擎11的设定转速neset被维持在规定转速ne_m。因而,翻卸动作及动臂下降回转动作中,引擎11的转速被维持在规定转速ne_m,并且引擎11的输出也被维持在与规定转速ne_m对应的中间程度的马力w_m。
129.如此,本实施方式中,控制器30以将引擎11维持在中间程度的转速(规定转速ne_m)的控制作为前提,根据操作装置16的操作状态,推测操作人员的操作意向,并根据推测结果使引擎11的转速上升至规定转速ne_h。具体而言,控制器30判断为主泵12从轻负荷状态向高负荷状态过渡的情况下,使引擎11的转速上升。并且,此时,作为操作人员的操作意向
的推测结果,控制器30判断操作装置16被向作业装置的作业负荷变高的方向进行操作的情况。并且,在主泵12的吐出压力p为规定压力p1以下的轻负荷状态下,在吐出压力p成为比规定压力p1低的规定压力p2以上的情况下,控制器30根据操作人员的操作意向的推测结果,使引擎11的转速上升。从而,在轻负荷状态下,能够将引擎11的转速抑制在中间程度的规定转速ne_m,因此能够抑制因过度的输出引起的挖土机的操作性恶化,并实现引擎11的油耗改善。并且,在高负荷状态下,根据操作人员的操作意向的推测结果,引擎11的转速上升至比较高的规定转速ne_h,因此能够使挖土机进行与高负荷状态对应的适当的动作。
130.以上,对用于实施本发明的方式进行了详述,但本发明并不限定于这种特定的实施方式,在权利要求书中所记载的本发明的主旨范围内,能够进行各种变形、变更。