1.本实用新型涉及机器人设计制造技术领域,尤其是涉及一种水利工程用清淤机器人。
背景技术:
2.水利工程是用于控制和调配自然界的地表水和地下水,达到除害兴利目的而修建的工程。也称为水工程。水是人类生产和生活必不可少的宝贵资源,但其自然存在的状态并不完全符合人类的需要,只有修建水利工程,才能控制水流,防止洪涝灾害,并进行水量的调节和分配,以满足人民生活和生产对水资源的需要。水利工程需要修建坝、堤、溢洪道、水闸、进水口、渠道、渡漕、筏道、鱼道等不同类型的水工建筑物,以实现其目标。
3.在水利工程修建的过程中通常会用到清淤机器人进行清淤工作,清淤机器人的吸泥管和泵体容易被混在淤泥中的树枝、大块垃圾和石头等堵塞,从而导致机器人清淤效率降低,甚至停机。
4.因此,有必要提供一种新的技术方案以克服上述缺陷。
技术实现要素:
5.本实用新型的目的在于提供一种可有效解决上述技术问题的水利工程用清淤机器人。
6.为达到本实用新型之目的,采用如下技术方案:
7.一种水利工程用清淤机器人,其特征在于:包括:
8.机器人本体;
9.引流板:固设于所述机器人本体的一端,且自左而右倾斜向下设置;
10.螺旋刀片:位于所述引流板远离所述机器人本体的一端,且与所述机器人本体转动连接,进行清淤工作;
11.粉碎辊组:位于所述引流板和所述螺旋刀片之间,且垂直设置,其顶端与所述机器人本体转动连接;
12.第一驱动件:固设于所述机器人本体的一侧,驱动所述螺旋刀片转动;
13.第二驱动件:固设于所述机器人本体的内部,驱动所述粉碎辊组工作;
14.吸泥罩:固设于所述引流板的表面;
15.以及,第一泵体:固设于所述机器人本体外侧,其进液端与所述吸泥罩通过吸泥管相连通。
16.优选的,所述粉碎辊组包括若干个平行设置的粉碎辊,所述粉碎辊的排列方向与所述机器人本体的运动方向相互垂直。
17.优选的,所述粉碎辊设置有3个,且每两个相邻的粉碎辊均通过传动皮带传动连接。
18.优选的,所述第二驱动件的驱动轴端部与其中一个所述粉碎辊的旋转轴固定连
接,从而驱动3个粉碎辊同时转动。
19.优选的,还包括离心转筒,其转动连接在所述机器人本体内,所述离心转筒的出料口通过吸泥管与所述第一泵体的进液口相连通,进料口通过吸泥管与所述吸泥罩相连通,所述吸泥管与所述离心转筒的进料口以及出料口均通过密封轴承转动连接。
20.优选的,还包括第二泵体,其固设于所述机器人本体的内部,进液端与所述吸泥罩通过吸泥管固定连接,出液端通过吸泥管与所述离心转筒的进料口相连通。
21.与现有技术相比,本实用新型具有如下有益效果:
22.1、本实用新型通过在引流板和螺旋刀片之间设置粉碎辊组,从而在清淤的过程中即可对淤泥中的大块垃圾、石头以及树枝等进行粉碎,进而可以有效避免在抽吸淤泥的过程第一泵体和吸泥管发生堵塞,保证机器人高效持续工作。
23.2、本实用新型通过设置离心转筒,其可以在对淤泥进行抽吸的过程中对其进行初步脱水处理,从而可以有效降低淤泥的含水量,便于后续处理。
附图说明
24.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍。
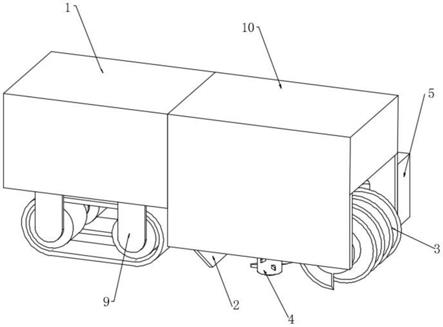
25.图1为本实用新型提供的一种水利工程用清淤机器人的结构示意图;
26.图2为本实用新型提供的一种水利工程用清淤机器人的内部结构示意图。
27.图中数字说明:
28.1、机器人本体;2、引流板;3、螺旋刀片;4、粉碎辊组;5、第一驱动件;6、第二驱动件;7、吸泥罩;8、第一泵体;9、运动机构;10、清淤罩;11、传动皮带;12、离心转筒;13、第二泵体。
具体实施方式
29.为了使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本实用新型的部分实施例,而不是全部实施例。
30.在本实用新型的描述中,需要理解的是,术语“中心”、“横向”、“纵向”、“前”、“后”、“左”、“右”、“上”、“下”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型保护范围的限制。当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
31.下面将结合附图对本实用新型一种水利工程用清淤机器人做出清楚完整的说明。
32.如图1和图2所示,本实用新型提供的一种水利工程用清淤机器人,其包括机器人本体1、引流板2、螺旋刀片3、粉碎辊组4、第一驱动件5、第二驱动件6、吸泥罩7以及第一泵体
8。
33.具体的,所述引流板2安装在所述机器人本体1的右侧底部,且其自左而右倾斜向下设置。所述螺旋刀片3位于所述引流板2远离所述机器人本体1的一端,且与所述机器人本体1转动连接。所述粉碎辊组4位于所述引流板2和所述螺旋刀片3之间,且垂直设置,其顶端与所述机器人本体1转动连接。
34.所述第一驱动件5安装在所述机器人本体1的后侧,其用于驱动所述螺旋刀片3转动进行清淤工作。所述第二驱动件6安装在所述机器人本体1的内部,其用于驱动所述粉碎辊组4转动,以对淤泥中的大块垃圾、石头以及树枝等进行粉碎。
35.所述吸泥罩7安装在所述引流板2的表面的左侧。所述第一泵体8安装在所述机器人本体1的左侧外侧壁上,其进液端与所述吸泥罩7通过吸泥管相连通,以进行淤泥抽吸工作。
36.本实用新型通过在引流板2和螺旋刀片3之间设置粉碎辊组4,从而在清淤的过程中即可对淤泥中的大块垃圾、石头以及树枝等进行粉碎,进而可以有效避免在抽吸淤泥的过程第一泵体8和吸泥管发生堵塞,保证机器人高效持续工作。
37.具体的,在本实施例中,所述机器人本体1的底部安装有运动机构9,所述运动机构9优选为履带式运动机构9。此外,所述机器人本体1的右侧安装有清淤罩10,所述螺旋刀片3转动连接在所述清淤罩10的右侧下端;所述第一驱动件5安装在所述清淤罩10的后侧;所述第二驱动件6安装在所述清淤罩10的顶部内侧壁上。
38.所述第一驱动件5和所述第二驱动件6均优先为驱动电机。
39.此外,在本实施例中,所述粉碎辊组4包括若干个平行设置的粉碎辊,且若干个所述粉碎辊的排列方向与所述机器人本体1的运动方向相互垂直。所述粉碎辊具体设置有三个,且每两个相邻的粉碎辊均通过传动皮带11传动连接,所述第二驱动件6的驱动轴端部与中间位置处的粉碎辊的旋转轴固定连接,从而驱动3个粉碎辊同时转动进行粉碎工作。
40.同时,在本实施例中,还设置有离心转筒12和第二泵体13,所述离心转筒12通过转动支架转动连接在所述机器人本体1的内部,其通过驱动电机以及齿轮组驱动其转动。所述离心转动的侧壁上均匀布设有透水孔。
41.所述第二泵体13安装在所述机器人本体1的内部,其进液端与所述吸泥罩7通过吸泥管固定连接,出液端通过吸泥管与所述离心转筒12的进料口相连通,所述离心转筒12的出料口通过吸泥管与所述第一泵体8的进液口相连通,且所述吸泥管与所述离心转筒12的进料口以及出料口均通过密封轴承转动连接。
42.本实用新型通过设置离心转筒12,其可以在对淤泥进行抽吸的过程中对其进行初步脱水处理,从而可以有效降低淤泥的含水量,便于后续处理。
43.此外,所述机器人本体1的左侧壁下端开设有出水口,便于离心过程中产生的污水排出。同时所述第二泵体13的外侧套设有防护罩,可以对其进行保护。
44.同时,所述机器人本体1的内部还设置有控制模块,所述第一驱动件5、第二驱动件6、运动机构9、离心转筒12、第一泵体8以及第二泵体13均与所述控制模块控制连接,其中具体的控制方法以及电路连接均为现有技术,故不再在此赘述。
45.本实用新型的工作原理如下:
46.使用时,将机器人放置在需要进行淤泥清理的位置处,然后启动所述机器人本体1
底部的运动机构9带动机器人本体1前行,同时开启第一驱动件5、第二驱动件6、离心转筒12以及第二泵体13,所述螺旋刀片3转动进行清淤工作,所述粉碎辊组4转动对淤泥中的垃圾、树枝等杂物进行粉碎,而后淤泥在第二泵体13的作用下沿引流板2进入吸泥罩7而后进入离心离心转筒12内,所述离心转筒12转动进行淤泥脱水工作,一段时间后,开启所述第一泵体8,关闭第一驱动件5、第二驱动件6、离心转筒12以及第二泵体13,从而将离心转筒12内残留的淤泥抽出。
47.本实用新型使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、铆钉、焊接等常规手段,机械、零件和设备均采用现有技术中,常规的型号,加上电路连接采用现有技术中常规的连接方式,在此不再详述,本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
48.所述对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。