1.本实用新型涉及封边机技术领域,尤其是一种封边机的伺服四头跟踪装置。
背景技术:
2.封边机是木工机械当中的一种,用于对板材进行封边作业,封边作业是板式家具制造过程中的一道重要工序,封边质量的好坏直接影响产品的质量、价格和档次,通过封边可以很好改善家具的外观质量,避免家具在运输和使用过程中边角部损坏、贴面层被掀起或剥落,同时可起到防水、封闭有害气体的释放和减少变形等作用,而且还能美化家具。
3.在木工机械中,为了使木板的各个侧面与上板面和下板面一样美观、光滑,通常对木板的四个侧面进行封边,从而使外露的木材纹理隐藏起来,但是经过封边后,封边带的四周棱角很锋利,容易划破手和衣服等,所以还需釆用圆角铣刀进行修整,传统的修角技术是将封边带的水平棱边和竖直棱边分开单独加工,存在着效率低,精度差等缺点。
技术实现要素:
4.本实用新型克服了现有技术中的缺点,提供一种封边机的伺服四头跟踪装置,通过设置有第一跟踪组件与第二跟踪组件,第一跟踪组件把板材上边缘的两个角修成圆角,第二跟踪组件把板材下边缘的两个角修成圆角,使板材的四个角圆滑,避免板材的边角划伤手或划破衣服。
5.为了解决上述技术问题,本实用新型是通过以下技术方案实现的:
6.一种封边机的伺服四头跟踪装置,包括底板,所述底板上设置有第一跟踪组件与第二跟踪组件,所述第一跟踪组件设置有第一跟踪电机,所述第一跟踪电机设置有上跟踪刀,所述上跟踪刀与所述第一跟踪电机连接,所述第二跟踪组件设置有第二跟踪电机,所述第二跟踪电机设置有下跟踪刀,所述下跟踪刀与所述第二跟踪电机连接。
7.优选地,所述第一跟踪组件设置有第一x轴滑座,所述第一x轴滑座设置有第一伺服电机,所述第一x轴伺服电机设置有第一齿轮,所述底板上设置有第一斜齿条,所述第一齿轮与所述第一斜齿条啮合连接,所述第一x轴滑座下表面设置有第一滑块,所述底板上设置有第一导轨,所述第一滑块滑动连接在所述第一导轨上。
8.优选地,所述第一x轴滑座上设置有第一跟踪立柱,所述第一跟踪立柱设置有第二导轨,所述第二导轨旁设置有第二斜齿条,所述第一跟踪立柱旁设置有第一z轴滑座,所述第一z轴滑座设置有第二伺服电机,所述第二伺服电机设置有第二齿轮,所述第二齿轮与所述第二斜齿条啮合连接,所述第一z轴滑座设置有第二滑块,所述第二滑块滑动连接在所述第二导轨上。
9.优选地,所述第一跟踪电机下方设置有第三伺服电机,所述第三伺服电机设置有第一丝杆,所述第三伺服电机固定连接在第一跟踪电机座上,所述第一跟踪电机座设置有第一跟踪燕尾板,所述第一跟踪燕尾板与所述第一跟踪电机固定连接,所述第一跟踪燕尾板与所述第一跟踪电机座滑动连接,所述第一跟踪燕尾板下方设置有第一滑动块,所述第
一滑动块与所述第一跟踪燕尾板固定连接,所述第一滑动块与所述第一丝杆连接,所述上跟踪刀处设置有第一跟踪靠模,所述第一跟踪靠模处设置有第一跟踪滚轮。
10.优选地,所述第二跟踪组件设置有第二x轴滑座,所述第二x轴滑座设置有第四伺服电机,所述第四伺服电机设置有第三齿轮,所述底板上设置有第三斜齿条,所述第三齿轮与所述第三斜齿条啮合连接,所述第二x轴滑座下表面设置有第三滑块,所述底板上设置有第三导轨,所述第三滑块滑动连接在所述第三导轨上。
11.优选地,所述第二x轴滑座上设置有第二跟踪立柱,所述第二跟踪立柱设置有第四导轨,所述第四导轨旁设置有第四斜齿条,所述第二跟踪立柱旁设置有第二z轴滑座,所述第二z轴滑座设置有第五伺服电机,所述第五伺服电机设置有第四齿轮,所述第四齿轮与所述第四斜齿条啮合连接,所述第二z轴滑座设置有第四滑块,所述第四滑块滑动连接在所述第四导轨上。
12.优选地,所述第二跟踪电机下方设置有第六伺服电机,所述第六伺服电机设置有第二丝杆,所述第六伺服电机固定连接在第二跟踪电机座上,所述第二跟踪电机设置有第二跟踪燕尾板,所述第二跟踪燕尾板与所述第二跟踪电机固定连接,所述第二跟踪燕尾板与所述第二跟踪电机座滑动连接,所述第二跟踪燕尾板下方设置有第二滑动块,所述第二滑动块与所述第二跟踪燕尾板固定连接,所述第二滑动块与所述第二丝杆连接,所述下跟踪刀处设置有第二跟踪靠模,所述第二跟踪靠模处设置有第二跟踪滚轮。
13.与现有技术相比,本实用新型的有益效果是:
14.通过设置有第一跟踪组件与第二跟踪组件,第一跟踪组件设置有第一伺服电机、第二伺服电机与第三伺服电机,第一伺服电机带动第一x轴滑座左右移动,第二伺服电机带动第一z轴滑座上下移动,第三伺服电机带动第一跟踪燕尾板前后移动,使第一跟踪电机能够左右、上下、前后移动,跟踪板材上边缘相邻的两个角修成圆角,第二跟踪组件设置有第四伺服电机、第五伺服电机与第六伺服电机,第四伺服电机带动第二x轴滑座左右移动,第五伺服电机带动第二z轴滑座上下移动,第六伺服电机带动第二跟踪燕尾板前后移动,使第二跟踪电机能够左右、上下、前后移动,跟踪板材下边缘相邻的两个角修成圆角,使板材的四个角圆滑,避免板材的边角划伤手或划破衣服。
附图说明
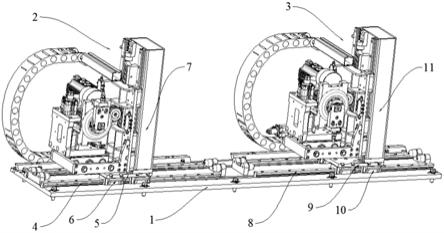
15.图1是本实施例所述伺服四头跟踪机构正视图;
16.图2是本实施例所述伺服四头跟踪机构后视图;
17.图3是本实施例所述第一跟踪组件正视图;
18.图4是本实施例所述第一跟踪组件后视图;
19.图5是本实施例所述第一跟踪电机与第三伺服电机示意图;
20.图6是本实施例所述第二跟踪组件正视图;
21.图7是本实施例所述第二跟踪组件后视图;
22.图8是本实施例所述第二跟踪电机与第六伺服电机示意图。
23.图中:1
‑
底板,2
‑
第一跟踪组件,3
‑
第二跟踪组件,4
‑
第一导轨,5
‑
第一x轴滑座,6
‑
第一滑块,7
‑
第一跟踪立柱,8
‑
第三导轨,9
‑
第二x轴滑座,10
‑
第三滑块,11
‑
第二跟踪立柱,12
‑
第一伺服电机,13
‑
第一斜齿条,14
‑
第一齿轮,15
‑
第四伺服电机,16
‑
第三斜齿条,17
‑
第
三齿轮,18
‑
第二伺服电机,19
‑
第二齿轮,20
‑
第一z轴滑座,21
‑
第二滑块,22
‑
第二导轨,23
‑
第二斜齿条,24
‑
第一跟踪靠模,25
‑
第一跟踪滚轮,26
‑
第三伺服电机,27
‑
第一跟踪电机,28
‑
上跟踪刀,29
‑
第一跟踪电机座,30
‑
第一跟踪燕尾板,31
‑
第一滑动块,32
‑
第一丝杆,33
‑
第五伺服电机,34
‑
第四齿轮,35
‑
第四斜齿条,36
‑
第四导轨,37
‑
第二z轴滑座,38
‑
第四滑块,39
‑
第二跟踪靠模,40
‑
第二跟踪滚轮,41
‑
第六伺服电机,42
‑
第二跟踪电机,43
‑
第二跟踪电机座,44
‑
第二跟踪燕尾板,45
‑
第二滑动块,46
‑
第二丝杆,47
‑
下跟踪刀。
具体实施方式
24.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
25.如图1至图8所示,一种封边机的伺服四头跟踪装置,包括底板1,底板1上设置有第一跟踪组件2与第二跟踪组件3,第一跟踪组件2设置有第一跟踪电机27,第一跟踪电机27设置有上跟踪刀28,上跟踪刀28与第一跟踪电机27连接,上跟踪刀28在第一跟踪电机27的转动带动下将板材上边缘相邻的两个角修成圆角,第二跟踪组件3设置有第二跟踪电机42,第二跟踪电机42设置有下跟踪刀47,下跟踪刀47与第二跟踪电机42连接,下跟踪刀47在第二跟踪电机42的转动带动下将板材下边缘相邻的两个角修成圆角。
26.如图3至图5所示,第一跟踪组件2设置有第一x轴滑座5,第一x轴滑座5设置有第一伺服电机12,第一伺服电机12设置有第一齿轮14,底板1上设置有第一斜齿条13,第一齿轮14与第一斜齿条13啮合连接,第一x轴滑座5下表面设置有第一滑块6,底板1上设置有第一导轨4,第一滑块6滑动连接在第一导轨4上,第一跟踪电机27设于第一x轴滑座5上,当第一伺服电机12转动时,第一伺服电机12带动第一齿轮14转动,第一斜齿条13固定连接在底板1上,第一齿轮14在第一斜齿条13上转动带动第一x轴滑座5左右移动,使第一跟踪电机27可以带动上跟踪刀28左右移动,第一x轴滑座5上设置有第一跟踪立柱7,第一跟踪立柱7设置有第二导轨22,第二导轨22旁设置有第二斜齿条23,第一跟踪立柱7旁设置有第一z轴滑座20,第一z轴滑座20设置有第二伺服电机18,第二伺服电机18设置有第二齿轮19,第二齿轮19与第二斜齿条23啮合连接,第一z轴滑座20设置有第二滑块21,第二滑块21滑动连接在第二导轨22上,第一跟踪立柱7固定连接在第一x轴滑座5上,第一z轴滑座20滑动连接在第一跟踪立柱7上,第一跟踪电机27设于第一z轴滑座20上,第二伺服电机18固定连接在第一z轴滑座20上,当第二伺服电机18转动时,第二伺服电机18带动第二齿轮19转动,第二斜齿条23固定连接在第一跟踪立柱7上,第二齿轮19在第二斜齿条23上转动带动第一z轴滑座20上下移动,第一z轴滑座20带动第一跟踪电机27上下移动,使第一跟踪电机27可以带动上跟踪刀28上下移动,第一跟踪电机27下方设置有第三伺服电机26,第三伺服电机26设置有第一丝杆32,第三伺服电机26固定连接在第一跟踪电机座29上,第一跟踪电机座29设置有第一跟踪燕尾板30,第一跟踪燕尾板30与第一跟踪电机27固定连接,第一跟踪燕尾板30与第一跟踪电机座29滑动连接,第一跟踪燕尾板30下方设置有第一滑动块31,第一滑动块31与第一跟踪燕尾板30固定连接,第一滑动块31与第一丝杆32连接,第三伺服电机26固定连接在第一跟踪电机座29上,第一跟踪电机27固定连接在第一跟踪燕尾板30上,当第三伺服电机26转动时,第三伺服电机26带动第一丝杆32转动,第一丝杆32转动带动第一滑动块31前后移动,第一滑动块31带动第一跟踪燕尾板30前后移动,第一跟踪燕尾板30带动第一跟踪电机
27前后移动,第一跟踪电机27带动上跟踪刀28前后移动,上跟踪刀28的前后移动能调节修圆角的大小,上跟踪刀28处设置有第一跟踪靠模24,第一跟踪靠模24处设置有第一跟踪滚轮25,第一跟踪靠模24内设置有轴承(图中未能画出),当板材滑动经过时,板材的封边面与第一跟踪靠模24转动接触,这样设计能减少板材的封边面与第一跟踪靠模24的摩擦,避免封边面的刮花,且延长第一跟踪靠模24的使用时间,第一跟踪滚轮25紧压板材的上表面,固定跟踪板材,辅助上跟踪刀28修角。
27.如图6至图8所示,第二跟踪组件3设置有第二x轴滑座9,第二x轴滑座9设置有第四伺服电机15,第四伺服电机15设置有第三齿轮17,底板1上设置有第三斜齿条16,第三齿轮17与第三斜齿条16啮合连接,第二x轴滑座9下表面设置有第三滑块10,底板1上设置有第三导轨8,第三滑块10滑动连接在第三导轨8上,第四伺服电机15的工作原理与第一伺服电机12的工作原理一样,使第二x轴滑座9带动第二跟踪电机42左右移动,第二x轴滑座9上设置有第二跟踪立柱11,第二跟踪立柱11设置有第四导轨36,第四导轨36旁设置有第四斜齿条35,第二跟踪立柱11旁设置有第二z轴滑座37,第二z轴滑座37设置有第五伺服电机33,第五伺服电机33设置有第四齿轮34,第四齿轮34与第四斜齿条35啮合连接,第二z轴滑座37设置有第四滑块38,第四滑块38滑动连接在第四导轨36上,第五伺服电机33的工作原理与第二伺服电机18的工作原理一样,使第二z轴滑座37带动第二跟踪电机42上下移动,第二跟踪电机42下方设置有第六伺服电机41,第六伺服电机41设置有第二丝杆46,第六伺服电机41固定连接在第二跟踪电机座43上,第二跟踪电机42设置有第二跟踪燕尾板44,第二跟踪燕尾板44与第二跟踪电机42固定连接,第二跟踪燕尾板44与第二跟踪电机座43滑动连接,第二跟踪燕尾板44下方设置有第二滑动块45,第二滑动块45与第二跟踪燕尾板44固定连接,第二滑动块45与第二丝杆46连接,第六伺服电机41的工作原理与第三伺服电机26的工作原理一样,使第六伺服电机41带动第二跟踪电机42前后移动,调节修角的大小,下跟踪刀47处设置有第二跟踪靠模39,第二跟踪靠模39处设置有第二跟踪滚轮40,第二跟踪滚轮40紧压板材下表面,辅助下跟踪刀47修角。
28.本实施例中,通过设有第一跟踪组件2与第二跟踪组件3,第一跟踪组件2设置有第一伺服电机12、第二伺服电机18与第三伺服电机26,带动第一跟踪电机27能够左右、上下、前后移动,跟踪板材上边缘相邻的两个角修成圆角,第二跟踪组件3设置有第四伺服电机15、第五伺服电机33与第六伺服电机41,带动第二跟踪电机42能够左右、上下、前后移动,跟踪板材下边缘相邻的两个角修成圆角,使板材的修角更加自动化,减少其修角的时间,提高工作效率。
29.最后应说明的是:以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,但是凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。