1.本实用新型属于木材加工设备领域,具体涉及一种人造板表面缺陷修补全自动智能一体化生产线。
背景技术:
2.现有的人造板在生产中,在进行粘合的基板里有大量虫眼、裂缝、丁眼、孔洞,主要用人工将小孔、裂缝等用腻子找平,然后晒干或自然干燥才能进入下一道工序。人工刮腻子劳动强度很大,一人无法操作, 若一张板材在长2600mm,宽1300mm,厚2mm
‑
30mm 之间,最重的板材也有50kg。人工刮腻子时要先刮正面再刮反面,刮完后再在每张板中间放置隔条立起来风干或晒干,干透后再进入下一道工序。每人每天最多只能刮300
‑
400 张,而且由于人工操作会由于操作水平不同导致在进行涂抹时涂抹不均匀,存在有操作误差,成型的板材精确度低,并且采用人工涂抹工作效率低,人力成本高且生产效率低。
技术实现要素:
3.本实用新型针对现有技术中人造板缺陷修补主要通过人工手动操作存在的工作效率低且修补后板材精度低的问题,本实用新型提出一种可用于对人造板表面缺陷修补的自动化智能一体化生产线,其能够对人造板的表面缺陷进行自动修补,提高了修补的效率和精确度。
4.为实现上述实用新型目的,本实用新型采用下述技术方案予以实现:
5.一种人造板表面缺陷修补全自动智能一体化生产线,包括有:
6.机架;
7.板材承载输送装置,装配在所述机架上,用于承载板材并将板材进行输送;
8.板材缺陷扫描装置,位于所述板材承载输送装置的上方,用于对输送的板材扫描以进行缺陷检测;
9.机械手,装配在所述机架上;
10.涂腻装置,装配在所述机械手上,能够在所述机械手带动下动作,用于对板材进行涂腻;
11.供腻装置,通过输腻通道与所述涂腻装置连通,用于给所述涂腻装置供料;
12.主控器,与所述板材缺陷扫描装置、涂腻装置、供腻装置通讯连接,其能够根据所述板材缺陷扫描装置传送的图像信息获取到所述板材缺陷的位置信息,并将此位置信息传递给所述机械手,使其带动所述涂腻装置到人造板的缺陷位置进行涂腻。
13.在本技术的一些实施例中,还包括有:烘干装置,其位于所述涂腻装置后侧,能够对涂腻完的板材进行烘干,在所述涂腻装置和烘干装置之间设置有送料架。
14.在本技术的一些实施例中,还包括有沿板材输送方向依次设置的自动进料装置、自动纠偏装置和推料装置,所述推料装置位于所述板材缺陷扫描装置前侧,在所述推料装置和所述板材缺陷扫描装置之间设置有送料架。
15.在本技术的一些实施例中,还包括有基座,设置有2个,对称设置,所述板材缺陷扫描装置横向跨设在2个基座之间,其两端分别和2个基座连接,所述基座的高度为可调的。
16.在本技术的一些实施例中,所述板材缺陷扫描装置通过座体安装在所述基座上,所述板材缺陷扫描装置相对座体的高度位置为可调的。
17.在本技术的一些实施例中,所述涂腻装置包括有:
18.出腻件,在所述出腻件内部形成有出腻通道和与所述出腻通道连通的出腻口;
19.涂腻件,固定在所述出腻件上且环绕在所述出腻口的周圈设置,其底面和出腻件上设有出腻口的端面平齐;
20.第一驱动件,与所述出腻件传动连接,用于驱动所述出腻件转动。
21.在本技术的一些实施例中,还包括有:第一控制部件和第二驱动件,所述第一控制部件和所述出腻件连接,用于控制所述出腻通道开闭,所述第二驱动件与所述第一控制部件连接,用以控制所述第一控制部件动作。
22.在本技术的一些实施例中,所述供腻装置包括有:进料料斗;
23.涂腻进料座,在所述涂腻进料座内形成有容料腔以及和所述容料腔连通的出料部;
24.第二控制部件,连接在所述进料料斗和所述涂腻进料座之间,用于控制进料料斗和容料腔的连通或隔开;
25.送料件,与所述容料腔连通;
26.滑动件,设置在所述送料件内,与所述送料件滑动密封连接;
27.驱动装置,与所述滑动件连接,用以驱动所述滑动件动作以将涂腻进料座中的腻子向外输出。
28.在本技术的一些实施例中,所述驱动装置为驱动气缸,所述驱动气缸包括有驱动活塞,所述驱动活塞和所述滑动件固定连接。
29.在本技术的一些实施例中,所述驱动装置包括有驱动电机和与所述驱动电机传动连接的线性模组,所述线性模组和所述滑动件固定连接。
30.在本技术的一些实施例中,板材承载输送装置上设置有多个布满所述板材承载输送装置的吸附孔,在所述板材承载输送装置下方设置有吸附装置,所述吸附装置连接一吸附管道,所述吸附管道的吸风口朝向所述板材承载输送装置。
31.与现有技术相比,本实用新型的优点和积极效果是:
32.本实用新型中的人造板表面缺陷修补全自动智能一体化生产线,在使用时,可通过板材承载输送装置实现对板材的输送,通过板材缺陷扫描装置来实现对板材进行扫描并将图像信息传递到主控器,主控器获取图像信息并识别出板材缺陷位置,对应的控制机械手带动涂腻装置移动到缺陷位置处自动进行涂腻操作,整个板材的涂腻实现了自动化,提高了生产效率;
33.同时,对板材进行缺陷修补完全通过涂腻装置自动实现,有效的避免了采用人工修补等人为因素的影响,保证了涂腻的精确度。
34.结合附图阅读本实用新型的具体实施方式后,本实用新型的其他特点和优点将变得更加清楚。
附图说明
35.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
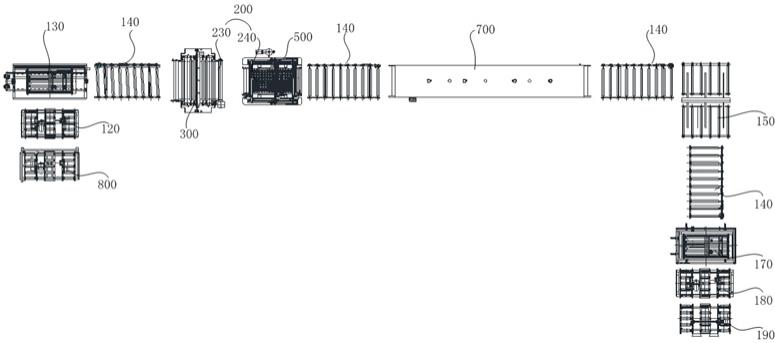
36.图1为本实用新型人造板表面缺陷修补全自动智能一体化生产线的整个生产线的结构示意图;
37.图2为本实用新型人造板表面缺陷修补全自动智能一体化生产线的涂腻装置和机械手配合的结构示意图;
38.图3为本实用新型人造板表面缺陷修补全自动智能一体化生产线的机械手的结构示意图;
39.图4为本实用新型人造板表面缺陷修补全自动智能一体化生产线的涂腻装置的结构示意图;
40.图5为本实用新型人造板表面缺陷修补全自动智能一体化生产线的涂腻件的结构示意图;
41.图6为图5的a
‑
a向剖视图;
42.图7为图3为本实用新型人造板表面缺陷修补全自动智能一体化生产线的出腻件的结构示意图;
43.图8为本实用新型人造板表面缺陷修补全自动智能一体化生产线的板材缺陷扫描装置的结构示意图;
44.图9为本实用新型人造板表面缺陷修补全自动智能一体化生产线的板材缺陷扫描装置的座体和调节丝杠的配合结构示意图;
45.图10为本实用新型人造板表面缺陷修补全自动智能一体化生产线的供腻装置的结构示意图;
46.图11为本实用新型人造板表面缺陷修补全自动智能一体化生产线的自动进料装置的主视图;
47.图12为本实用新型人造板表面缺陷修补全自动智能一体化生产线的自动进料装置的俯视图;
48.图13为本实用新型人造板表面缺陷修补全自动智能一体化生产线的第一驱动减速机和第一座体、第二座体连接配合的结构示意图。
49.其中,机架100 、进料辊台120 、推料装置130、
50.送料架140、翻板机150、码垛机170、自动纠偏辊台180 、自动出料机190、
51.板材承载输送装置200 、吸附孔210 、第一输送床230 、 第二输送床240、
52.板材缺陷扫描装置300、 基座310 、座体320、装配板331、调节丝杠332、调节螺母333、升降减速机331、线性模组332、
53.机械手400、纵向滑道410、横向滑道420、第一直线驱动机构430、竖向滑道440、第二直线驱动机构450、第三直线驱动机构460、
54.涂腻装置500、出腻件510、涂腻件520、第一驱动件530、第一控制部件540 、第二驱动件550、
55.供腻装置600、进料料斗610、涂腻进料座620、第二控制部件630、送料件640 、驱动装置650、第三驱动件660、
56.烘干装置700、
57.自动进料装置800、 第一座体810、 位置检测元件811、
58.第二座体820 、第一驱动减速机830 、链轮传动机构840 、输送辊组件850、第二驱动减速机860 、多组双排辊组驱动链轮870。
具体实施方式
59.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下将结合附图和实施例,对本实用新型作进一步详细说明。
60.需要说明的是,在本实用新型的描述中,术语“上”、“下”、“左”、“右”、“竖”、“横”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
61.本实用新型提出一种人造板表面缺陷修补全自动智能一体化生产线的实施例,包括有:
62.机架100,机架100在设置时,可设置成包括第一架体和第二架体,第一架体和第二架体沿板材输送方向依次并列设置。
63.第一架体可设置成包括有2个相对设置的第一支撑架板,2个第一支撑架板之间具有间距,在2个第一支撑架板之间连接有第一连接筋板。
64.第一连接筋板可设置多个,实现对2个第一架体之间的连接。
65.第二架体则包括有2个相对设置的第二支撑架板,2个第二支撑架板之间具有间距,在2个第二支撑架板之间连接有第二连接筋板。
66.机架100主要用于实现对整个设备的支撑作用。
67.板材承载输送装置200,装配在所述机架100上,用于承载板材并将板材进行输送;
68.在一些优选的实施例中,所述板材承载输送装置200结构设置成包括有:
69.第一输送床230,第一输送床230装配在第一架体上,其用于承载板材。
70.本实施例中的第一输送床230可用于对板材进行横向输送或纵向输送均可,当对板材纵向输送时,应使得第一输送床230的宽度大于板材的宽度;
71.当对板材进行横向输送时,应使得第一输送床230宽度大于板材的长度,以对板材进行较好的承载。
72.第一传动部件,设置有2个,分别布置在所述第一输送床230的两端。
73.优选的,第一传动部件为第一传动辊,其设置在所述第一输送床230的两端且第一传动辊的顶面和第一输送床230的顶面平齐,在进行输送时,通过位于第一输送床230两端的第一传动部件来进行板材输送。
74.第一驱动装置650,与其中一个所述第一传动部件传动连接,用以驱动所述第一传动部件转动;
75.第一驱动装置650包括有第一驱动减速机830、第一主链轮、第一从动链轮和第一
链条和第一传送带,在连接时,第一驱动减速机830和第一主链轮传动连接,第一链条两端分别缠绕在第一主链轮和第一从动链轮上,第一从动链轮和其中一个第一传动部件连接,在2个第一传动部件之间连接有所述第一传送带。
76.在进行驱动时,可通过第一驱动减速机830动作,带动第一主链轮转动 ,第一主链轮带动第一从动链轮转动,第一从动链轮带动和其连接的第一传动部件转动,最终通过第一传送带作用使得2个第一传动部件均转动,对承载在第一输送床230上的板材进行向前输送。
77.第二输送床240,第二输送床240与第一输送床230对接,以承载从第一输送床230输送来的板材。
78.第二传动部件,设置有2个,分别布置在所述第二输送床240的两端。
79.第二驱动装置,与所述第二传动部件传动连接,用以驱动所述第二传动部件转动。
80.第二传动部件优选为第二传动辊,在进行板材输送时,同样通过第二驱动装置动作带动第二传动部件转动,以对承载在第二输送床240上的物料进行输送运输,第二输送床240和第二传动部件、第二驱动装置的连接配合方式与第一输送床230相同,在此不做一一赘述。
81.板材表面缺陷扫描装置300,位于第一输送床230的上方,能够对从第一输送床230输送来的板材进行扫描。
82.在一些优选的实施例中,板材表面缺陷扫描装置300为宽幅线性扫描相机,为直接采购的现有线性扫描相机,其能够对经过板材承载输送装置200输送来的板材依次进行扫描并成像,便于后期可通过图像获取到板材上的缺陷的位置信息。
83.在本技术的一些实施例中,板材表面缺陷扫描装置300的扫描速度40米/分,宽度大于等于板材的宽度,以实现对板材的直接扫描。
84.具体的,本实施例的人造板表面缺陷修补全自动智能一体化生产线还包括有基座310,基座310设置有2个,对称设置,在2个基座310之间具有间距,2个基座310分别和2个第一支撑架板位置对应。
85.板材表面缺陷扫描装置300横向跨设在2个基座310之间,其两端分别固定在2个基座310上,所述基座310的高度为可调的。
86.第一输送床230也位于2个基座310之间且处于板材表面缺陷扫描装置300下方,板材先通过第一驱动装置650作用驱动第一传动部件转动进行输送,输送的板材会沿第一输送床230不断向前输送,在输送过程中,板材缺陷装置则可以对应的扫描经过的板材。
87.为使得板材表面缺陷扫描装置300能供对不同厚度的板材进行扫描,本实施例中还设置有:升降装置,所述升降装置包括有:升降减速机331和与所述升降减速机331连接的线性模组332,所述线性模组332和所述基座310固定连接。
88.线性模组332直接选用丝杠螺母线性模组332,在连接时,将升降减速机331和丝杠连接,螺母和基座310连接,通过升降减速机331输送动力到丝杠,丝杠转动带动螺母上下移动进而实现基座310实现上下移动。
89.当然,本实施例中的升降装置也可以直接用升降机等现有的可以上下升降的装置来实现,在此不做具体限制。
90.升降装置动作时,可带动连接在升降装置上的基座310上下移动,进而实现基座
310上方的扫描装置和位于下方的输送床之间的距离的调整,以使其能够适配不同厚度的板材,进而使得其能够对不同厚度板材进行检测,扩大了板材检测的范围,提高了扫描装置的通用性。
91.为实现对板材表面缺陷扫描装置300的安装,本实施例中还设置有座体320,扫描装置通过装配板装配在2个座体320上。
92.为实现对扫描装置高度的微调节,本实施例中还设置有用于调节扫描装置相对座体320高度的高度调节机构。
93.优选的,本实施例中的所述高度调节机构包括有调节丝杠和调节螺母,座体320呈u型,所述座体320中形成有插入空间,所述扫描装置的装配板端部伸入所述插入空间,所述调节螺杆穿过所述座体320,两端转动连接在所述座体320内,所述调节螺母和所述装配板固定连接,所述调节丝杆和所述调节螺母螺纹连接。
94.在调节时,可通过旋拧调节丝杠,调节丝杠转动带动和其螺纹连接的调节螺母做直线移动,进而实现对和调节螺母连接的装配板的上下位置的调节。
95.为提高检测的精度,本实施例中还包括有:
96.压紧部件,设置有多个,压紧部件横向跨设在2个基座310之间,其两端分别和2个基座310连接,多个压紧部件沿板材输送方向依次等间距或不等间距设置。
97.优选的,压紧部件为压紧辊筒,每个压紧辊筒均沿输送床的宽度方向或长度方向设置,压紧辊筒两端装配在2个基座310上。
98.机械手400,装配在所述机架100上,具体的,机械手400装配在第二架体上。
99.所述机械手400包括有:纵向滑道410,其固定设置在所述机架100上;
100.纵向滑道410设置有2根,分别固定在2个第二支撑架板上。
101.横向滑道420,可滑动的设置在所述纵向滑道410内,横向滑动横设在2个纵向滑道410之间,其两端能够沿纵向滑道410进行滑动。
102.第一直线驱动机构430,与所述横向滑道420连接,用以驱动所述横向滑道420沿所述纵向滑道410滑动;
103.竖向滑道440,所述竖向滑道440可滑动的设置在所述横向滑道420内;
104.第二直线驱动机构450,与所述竖向滑道440连接,用以驱动所述竖向滑道440沿所述横向滑道420滑动;
105.第三直线驱动机构460,装配在所述竖向滑道440上,与所述出腻装置连接,用以驱动所述出腻装置沿所述竖向滑道440上下移动。
106.第一直线驱动机构430可包括有第一驱动电机和与第一驱动电机连接的第一直线模组,优选的,第一直线模组为丝杠螺母直线模组,其包括有第一丝杠和第一螺母,直接采用现有技术中已有直线模组结构,在第一丝杠在第一驱动电机驱动下转动时,能够带动和其连接的第一螺母做直线移动,通过第一螺母和所述横向滑道420固定连接带动横向滑道420沿纵向滑道410做纵向方向的滑动,即y方向。
107.第二直线驱动机构450包括有:第二驱动电机和第二驱动电机连接的第二直线模组,第二直线模组包括第二丝杠和第二螺母,连接时,第二驱动电机和第二丝杠传动连接,第二丝杠和第二螺母螺纹连接,第二直线模组可直接采用现有技术中的丝杠螺母直线模组,第二丝杠能够将转动转化为第二螺母的直线移动,第二螺母对应和竖向滑道440连接,
通过第二螺母则对应的带动竖向滑动相对横向滑道420滑动,实现x方向的滑动。
108.第三直线驱动机构460也对应包括有第三驱动电机和第三直线模组,通过第三直线模组的第三螺母对应的带动和其连接的出腻装置相对竖向滑道440上下移动,以实现z方向的位置调整。
109.涂腻装置500,所述涂腻装置500装配在所述机械手400上,位于第二输送床240的上方,能够在所述机械手400带动下移动,其用于对板材进行涂腻。
110.本实施例中设置的机械手400,在使用时可带动出腻装置实现x、y和z三个方向的移动和位置的调整,使得出腻装置能够快速的移动到不同的位置处对板材上不同位置处的虫眼或裂缝进行涂腻操作,能够快速的到达涂腻位置,增加了涂腻操作的便利性,提高了涂腻操作的效率。
111.为实现快速的涂腻,提高涂腻效率,本实施例可设置多组横向滑道420和竖向滑道440,多组横向滑道420沿板材输送方向依次设置,相邻的横向滑道420之间具有间距,在多组横向滑道420上对应的设置竖向滑道440,在多组竖向滑道440上对应设置涂腻装置500,这样可以多组涂腻装置500同步运行进行对板材的涂腻,进一步提高了涂腻效率。
112.涂腻装置500包括有:
113.出腻件510,在所述出腻件510内部形成有出腻通道和与所述出腻通道连通的出腻口;在一些优选的实施例中,出腻件510设置为出腻轴,出腻口设置在所述出腻件510的底部,出腻轴对应为一竖向布置的轴,出腻通道形成在出腻轴内,沿出腻轴的轴线方向设置,从上到下贯穿出腻件510设置。
114.涂腻件520,固定在所述出腻件510上且环绕在所述出腻口的周圈设置,其底面和出腻件510上设有出腻口的端面平齐;
115.涂腻件520主要用于对腻子进行涂抹,在一些优选的实施例中,涂腻件520在设置时可对应的套设在出腻件510上,具体装配时,可对应的在涂腻件520上开设贯穿涂腻件520的装配孔,所述涂腻件520通过所述装配孔过盈装配到所述出腻件510上以实现和出腻件510之间的固定连接。
116.优选的,本实施例中的涂腻件520为锥形盘,其对应的外径从上到下逐渐变大,其包括有位于锥形盘两端的第一端面和第二端面,所述第一端面的径向值大于第二端面径向值,第二端面对应为锥形盘的底面,其和出腻轴上开设出腻口的底面相平齐。
117.所述涂腻件520也可以圆柱型或长方体等其它形状,只要可环绕设置在出腻件510的周围并且满足其底面和出腻件510设出腻口的底面相平齐,能够对从出腻口流出的腻子进行涂抹即可,在此不做具体限制。
118.第一驱动件530,与所述出腻件510传动连接,用于驱动所述出腻件510转动。
119.在一些优选的实施例中,第一驱动件530可选用减速机,减速机对应和出腻件510连接,在设置时,出腻件510可穿插在减速机内部,在出腻件510外侧面上设置有键槽,出腻件510和减速机本体之间通过单向键连接固定。
120.减速机可直接选用现有技术中已有的减速机结构即可,在此不做具体限制。
121.涂腻装置500在使用时,位于出腻通道中的腻子则可以从出腻口中流出,涂腻装置500在使用过程中应使得出腻件510和涂腻件520底部均贴合待涂腻的板材,控制第一驱动件530动作,带动和其传动连接的出腻件510转动,出腻件510转动可对应的带动和其固定连
接的涂腻件520同步转动,由于腻子为液态物质,其从出腻口流出到后会向四周流动,流出到需要进行涂腻的板材上的开口处的腻子,或从开口向四周流动,同时,由于出腻件510带动涂腻件520不断的转动,从出腻口流出的虫眼或者裂缝位置处时,会以需要涂腻的虫眼或裂缝为中心向四周不断堆积,同时,由于本实施例中出腻件510和涂腻件520为不断转动的,腻子则会被不断转动的涂腻件520和出腻件510碾压平并涂抹均匀,实现了对腻子的自动涂抹,通过本实施例中涂腻件520和出腻件510自动转动来实现自动对腻子进行抹平则不需要人工手动涂腻,有效的避免了手动涂抹导致的对板材涂抹不均匀以及涂抹后的精确度低的问题。
122.进一步的,还包括有:第一控制部件540和第二驱动件550,所述第一控制部件540和所述出腻件510连接,用于控制所述出腻通道开闭,所述第二驱动件550与所述第一控制部件540连接,用以控制所述第一控制部件540动作。
123.所述第二驱动件550可以选用为驱动气缸, 第一控制部件540为旋转接头,旋转接头可直接采用现有技术中的旋转接头结构即可,在此不做一一赘述。
124.第一控制部件540也可以选用现有技术中的常用旋转开关或旋转阀等结构。为方便进行电控,本实施例中的涂腻装置500还可以对应的设置电磁阀,使得主控器和电磁阀连接,电磁阀和第二驱动件550通讯连接。
125.通过主控器可发送控制信号到电磁阀,电磁阀发送信号控制第二驱动件550,使得第二驱动件550动作,通过第二驱动件550动作对应的带动和第二驱动件550连接的第一控制部件540动作。
126.供腻装置600,通过输腻通道与所述涂腻装置500连通,用于给所述涂腻装置500供料;
127.具体的,供腻装置600包括有进料料斗610;
128.涂腻进料座620,在所述涂腻进料座620内形成有容料腔以及和所述容料腔连通的出料部;
129.第二控制部件630,连接在所述进料料斗610和所述涂腻进料座620之间,用于控制进料料斗610和容料腔的连通或隔开,当第二控制部件630控制进料料斗610和容料腔导通时,则可通过进料料斗610向涂腻进料座620中进行供料,当第二控制部件630控制进料料斗610和容料腔断开时,此时,进料料斗610则不向容料腔中供料。
130.第二控制部件630为旋转接头,连接在进料料斗610和涂腻进料座620之间。
131.送料件640,与所述容料腔连通;
132.滑动件,设置在所述送料件640内,与所述送料件640滑动密封连接;
133.驱动装置650,与所述滑动件连接,用以驱动所述滑动件动作以将涂腻进料座620中的腻子向外输出。
134.本实施例中将滑动件和送料件640设置成为滑动密封配合连接方式主要用于可确保滑动件既能够相对送料件640滑动,又能够在滑动时产生压力作用到位于涂腻进料座620中的腻子料使其被挤出。
135.作为本实施例中的驱动装置650的第一种实施方式为:所述驱动装置650为驱动气缸,所述驱动气缸包括有驱动活塞,所述驱动活塞和所述滑动件固定连接。
136.即通过驱动气缸的驱动活塞来回移动带动和其连接的滑动件来回移动,以实现送
料的目的。
137.作为本实施例中的驱动装置650的第二种实施方式为:所述驱动装置650为液压缸,所述液压缸包括有液压活塞杆,所述液压活塞杆与所述滑动件固定连接。
138.即在使用时,通过液压活塞杆带动滑动件来回滑动实现送料的效果。
139.作为本实施例中的驱动装置650的第三种实施方式为:所述驱动装置650包括有驱动电机和与所述驱动电机传动连接的线性模组332,所述线性模组332和所述滑动件固定连接,所述线性模组332为丝杆螺母直线模组或滑台模组。
140.当然,驱动装置650为驱动电机时,还可以通过驱动电机和相应的线性模组332连接,以将电机的转动转换为直线运动,进而带动和线性模组332连接的滑动件相对送料件640来回做直线移动。
141.本实施例中的线性模组332包括上述所述的线性模组332但不限于上述实施方式的线性模组332,只有同样能够实现直线移动即可,均属于本技术的保护范围之内。
142.为实现对第二控制部件630的电动控制,本实施例中的供腻装置600还包括有
143.第三驱动件660,第三驱动件660可选用驱动液压缸或气缸等,用以驱动第二控制部件630旋转动作。
144.在进料时,线通过第二控制部件630来控制进料料斗610和容料腔之间连通,然后通过驱动装置650动作,驱动装置650带动滑动件动作,使得滑动件相对送料件640滑动,由于送料件640和滑动件之间密封连接,当滑动件在驱动装置650作用下向远离涂腻进料座620处移动时,则会在进料件内部产生负压,由于进料件和容料腔连通,容料腔和进料料斗610连通,通过产生的负压压力则可以将位于进料料斗610中的腻子吸附到涂腻进料座620内,由于腻子为比较粘稠的物料,如果让其自然下滑的话则会产生供料困难的问题,本实施例中通过利用负压吸力作用能够保证位于进料料斗610中的腻子能够顺利的进入到涂腻进料座620内,实现了进料料斗610的供料。
145.同样的,当需要进行送料时,对应的控制驱动装置650动作,带动和驱动装置650连接的滑动件相对送料件640滑动,由于物料已经进入到容料腔内,且容料腔和进料件连通,当滑动件向靠近涂腻进行座风方向移动时,则会产生压力到位于涂腻进料座620中的腻子,进而通过压力作用将位于涂腻进料座620中的腻子从出料部向外挤出,实现了供腻。
146.主控器,与所述板材表面缺陷扫描装置300、涂腻装置500、供腻装置600通讯连接,其能够根据所述板材表面缺陷扫描装置300传送的图像信息获取到所述板材缺陷的位置信息,并将此位置信息传递给所述机械手400,使其带动所述涂腻装置500到人造板的缺陷位置进行进行涂腻。
147.在进行工作时,主控器控制第一驱动装置650动作,第一驱动装置650带动第一传动部件转动,位于第一输送床230两侧的第一传动部件对板材进行输送,板材在输送时,会经过位于其上方的板材表面缺陷扫描装置300,板材表面缺陷扫描装置300对板材进行扫描,扫描后直接成像,并将成型的图像信息传递给主控器,主控器根据图像信息获取到板材上的缺陷位置。板材在输送时,经过板材表面缺陷扫描装置300扫描后会从第一输送床230传输到第二输送床240上,通过第二驱动装置动作带动第二传动部件动作继续进行板材的输送,当输送到板材完全位于第二输送床240上时,则进行下一步的涂腻操作,此时,主控器会根据板材的缺陷位置信息控制所述机械手400动作,主控器会根据板材图像获取到的板
材的缺陷位置控制机械手400带动涂腻装置500移动到需要涂腻位置处。
148.同步的,主控器会发生信号到第一控制部件540动作,使得进料斗和容料腔导通,然后控制驱动装置650动作,带动滑动件向远离涂腻进料座620侧移动,通过负压将进料料斗610中的腻子抽入到涂腻进料座620中,然后再控制驱动装置650带动滑动件相对送料件640滑动,将腻子从涂腻进料座620向外推出到输腻通道,然后通过压力将输腻通道中的腻子压入到出腻件510的出腻通道内,通过出腻口将腻子挤出,同时,控制出腻件510转动,进行腻子抹平,通过机械手400动作可以带动涂腻装置500在不同位置之间移动以对不同位置处的板材上的缺陷进行涂腻。
149.主控器在设置时,其内部可内置图像分析处理模块,用于对图像进行分析处理并获取到图像中缺陷点位置。图像分析处理模块可直接采购现有图像提取模块即可。
150.进一步的,在所述第一输送床230和第二输送床240上可设置有多个布满所述输送床的吸附孔210,在所述输送床下方设置有吸附装置220,所述吸附装置220连接一吸附管道,所述吸附管道的吸风口朝向所述输送床。吸附装置220优选为吸附风机,吸附管道优选为吸附风管,其连接所述吸附风机。
151.在使用时,可开启吸附风机,吸附风机通过吸附风管进行吸风,以在输送床处形成有负压,当板材承载在输送床上时,可通过负压作用使得板材牢固的贴合在输送床的表面上,确保板材在输送床上进行涂腻操作时不会发生翘曲等问题,有效的保证了涂腻操作的精确度。
152.在涂腻完成后的板材,可通过第二驱动装置带动第二输送床240将其向外继续输送。
153.为实现对涂腻后的板材的干燥,本实施例中还设置有干燥装置,其位于所述涂腻装置500后侧,干燥装置能够对涂腻完的板材进行烘干, 在所述涂腻装置500和烘干装置700之间设置有送料架140。
154.在本技术的一些实施例中,还包括有沿板材输送方向依次设置的自动进料装置800、进料辊和推料装置130,所述推料装置130位于所述板材表面缺陷扫描装置300前侧,在所述推料装置130和所述板材表面缺陷扫描装置300之间设置有送料架140。
155.推料装置130可直接选用现有推料机。
156.自动进料装置800包括有:
157.第一座体810,在第一座体810上设置有支撑架,在所述支撑架上设有用于检测板材位置的位置检测元件811,位置检测元件811优选为光电检测开关,其能够检测板材两侧位置是否发生偏斜。
158.第二座体820,设置在第一座体810上,能够相对第一座体810沿左右方向滑动;
159.第一驱动减速机830和链轮传动机构840, 所述链轮传动机构840包括有第一主驱动链轮、第一从动链轮和链条,所述第一主驱动链轮和所述第一驱动减速机830连接,所第一从动链轮装配在所述第二座体820上,所述第一驱动减速机830装配固定在所述第二座体820上,所述链条缠绕设置在所述第一主驱动链轮和第一从动链轮上,其包括有用于连接的第一连接端和第二连接端,所述第一连接端和所述第二连接端均与所述第一座体810固定连接。
160.在工作时,可通过第一驱动减速机830动作,带动连接在第一驱动减速机830的输
出轴上的第一主驱动链轮转动。
161.所述链条包括有缠绕在第一主驱动链轮和第一从动链轮上的第一连接段,以及连接在第一主驱动链轮和第一连接端之间的第二连接段,连接在第二连接端和第一从动链轮上的第三连接段。
162.当第一主驱动链轮顺时针转动时,第二连接段长度变短,且第一连接段固定在第一座体810上,第一驱动减速机830和第二座体820连接,此时会使得第一驱动减速机830和第二座体820相对第一座体810向右运动,带动位于其上方的板材向右运动,实现板材左偏位置调整。
163.当第一驱动减速机830逆时针转动时,第三连接段长度变短,此时,第一驱动减速机830和第二座体820则会相对第一座体810向左移动,带动位于其上方的板材向左移动,实现板材右偏位置调整。
164.输送辊组件850,设置有2组,分别布置在所述第二座体820的左右两侧位置处;
165.输送辊组件850包括有输送辊和输送辊架,输送辊转动连接在输送辊架上。
166.第二驱动减速机860、减速机驱动链轮、多组双排辊组驱动链轮870和链条,多组双排辊组驱动链轮870分别连接在多组输送辊上,所述第二驱动减速机860的输出轴和减速机驱动链轮连接,所述减速机驱动链轮和其中一组双排辊组驱动链轮870的其中一链轮通过链条连接,相邻的输送辊对应的双排滚阻驱动链轮间通过链条连接。
167.在连接时,减速机驱动链轮通过链条和双排辊组驱动链轮870的其中一个链轮传动连接,双排链轮的另一链轮则对应的通过链条和其相邻的输送辊上的双排链轮的其中一链轮连接,其剩余链轮和其相邻的输送辊上的双排链轮中的其中一个链轮连接,多个输送辊对应的双排链轮依次连接在一起,以实现联动。
168.若板材左前侧向前倾斜,右后侧向后倾斜时,则可控制与左前侧位置对应的输送辊组件850逆时针方向转动,同时,控制右后侧位置对应的输送辊组件850顺时针转动,来对板材进行前后偏斜纠偏。
169.当然,也可以只控制其中的一侧的输送辊组件850动作也可以。
170.自动进料纠偏装置能够对板材左右方向和前后方向均进行纠偏,保证了板材向后方的生产线输送时位置的精准性。
171.主控器,与所述位置检测元件811通讯连接,能够根据接受到的位置检测元件811信号控制所述第一驱动减速机830和所述第二驱动减速机860动作。
172.在烘干装置700后方沿板材输送方向还依次设置有直辊送料架140、翻板机150、直辊送料架140、码垛机170、出料辊台和自动出料机190。
173.翻板机150、码垛机170、自动出料装置可直接采用现有的结构。
174.本实施例中的人造板表面缺陷修补全自动智能一体化生产线,在使用时,板材先通过自动送料装置被输送进来,然后进入到自动进料纠偏装置进行纠偏,纠偏完成后进入到推料装置130,再通过送料架140进入到板材缺陷检测装置,板材输送通过承载输送装置实现,通过板材表面缺陷扫描装置300来实现对板材进行扫描并将图像信息传递到主控器,主控器获取图像信息并识别出板材缺陷位置,对应的控制机械手400带动涂腻装置500移动到缺陷位置处自动进行涂腻操作,涂腻完成后的板材进入到烘干装置700进行自动烘干,然后经过翻边板进行翻板操作,进入码垛机170进行码垛,然后就过自动纠偏辊台180纠偏后
从自动出料装置中输出。
175.整个板材的涂腻修补过程完全自动完成,实现了自动化修补,提高了生产效率;
176.同时,对板材进行缺陷修补完全靠涂腻装置500等设备组合自动完成,有效的避免了采用人工修补存在人为因素影响的问题产生,保证了涂腻的精确度。
177.现有的对板材进行涂腻修补缺陷时,无论采用人工修补方式,还是自动涂抹的机器进行修布均存在有腻子沉降现象,腻子沉降后,需要进行二次修补,二次修补不仅费时费力,降低生产效率,而且还导致大量的腻子被浪费。
178.本实施例中提出的人造板表面缺陷修补全自动智能一体化生产线,在对板材缺陷修补时,可通过机械手的z方向移动来对应的控制在z方向上的腻子修补的高度,使得修补后腻子高度比板材面高0.2—0.4mm,这样在后期腻子进行沉降后则刚好可以和板材表面保持持平,不需要二次修补,有效的避免了因二次修补造成的腻子浪费的问题。
179.以上实施例仅用以说明本发明的技术方案,而非对其进行限制;尽管参照前述实施例对本发明进行了详细的说明,对于本领域的普通技术人员来说,依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或替换,并不使相应技术方案的本质脱离本发明所要求保护的技术方案的精神和范围。