1.本实用新型属于食品加工机械技术领域,具体涉及一种机制馒头蜘蛛手自动抓取模具。
背景技术:
2.传统制作馒头的方式采用人工发面制作,但传统方式不仅产量少,制作速度慢,且不卫生,所以,现在一般都采用机器制作发面馒头,机制发面馒头,市场需求量大,人工成本高。目前馒头生产要产量化,多使用大型多排馒头机、蜘蛛手抓取摆盘进行生产,由于馒头表面有一定的粘性,抓取时不稳定,容易造成漏抓,抓变形等问题。为了解决上述问题,目前亟待研究一种能够快速高效抓取机制馒头的抓取工具。
技术实现要素:
3.为了解决现有技术中存在的问题,本实用新型的目的是提供一种机制馒头蜘蛛手自动抓取模具,该模具能够快速、稳定。保质保量的实现机制馒头的抓取。
4.为了实现上述目的,本实用新型采用如下技术方案:
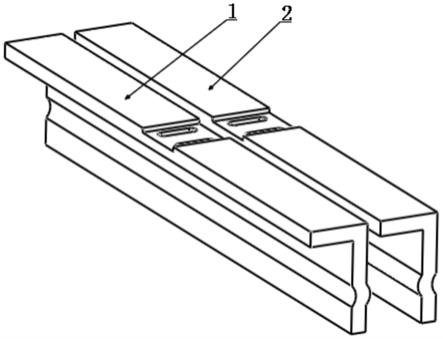
5.一种机制馒头蜘蛛手自动抓取模具,所述每套模具包括第一夹板和第二夹板,所述第一夹板和第二夹板均由弧形夹取位、固定板、安装位组成,所述弧形夹取位是对称向里的,所述固定板设置在所述弧形夹取位的上方,所述固定板上表面中间位置设置有安装位。
6.进一步的,所述弧形夹取位不得高于馒头生胚的二分之一,能够保证抓取馒头时保持馒头形状不发生变化。
7.进一步的,所述安装位可以根据馒头的大小来进行夹具间距的调节。
8.进一步的,所述模具的固定板设置为同向,可以节省安装空间的同时还实现多套模具同时工作。
9.进一步的,所述安装位设置为条形孔,为了适应大小不同的馒头而调节抓取模具与工作气缸之间的相对位置。
10.进一步的,所述模具表面喷涂有铁氟龙涂层,避免馒头在放入钢盘里面时粘连模具。
11.与现有技术相比,本实用新型具备的有益效果在于:
12.(1)现有技术中机制馒头蜘蛛手抓取模具抓取馒头时存在不稳定,容易造成漏抓、抓变形、放盘时粘连模具等问题,本实用新型的机制馒头抓取模具采用弧形夹取位,且弧形夹取位对称向里对馒头进行抓取,这种设计使该模具更贴近馒头的形状,抓取馒头时更加稳定,在馒头放入钢盘时抓手模具表面涂有铁氟龙涂层,使馒头能够迅速地与模具脱离,使馒头抓取速度由780个/分钟,提升到1140个/分钟,效率提升30%左右,馒头抓取更加稳定相应地减少了馒头的次品率。
13.(2)本实用新型的安装位设置为条形孔,能够适应大小不同的馒头而调节抓取模具与工作气缸之间的相对位置,本实用新型机制馒头蜘蛛手自动抓取模具随着气缸的伸缩
可以实现对馒头的抓取,当机械馒头抓手运动到放置位时,所述抓取模具随着气缸张开,在铁氟龙涂层的作用下馒头可以顺利实现快速、稳定放置和脱离。
附图说明
14.图1是本实用新型一种机制馒头蜘蛛手自动抓取模具的斜视图;
15.图2是本实用新型一种机制馒头蜘蛛手自动抓取模具的侧视图;
16.图3是本实用新型一种机制馒头蜘蛛手自动抓取模具的俯视图。
17.其中,图中:
18.1、第一夹板;2、第二夹板;2-1、弧形夹取位;2-2、固定板;3、安装位。
具体实施方式
19.下面,结合附图以及具体实施例,对实用新型做出进一步的描述。
实施例
20.请参阅图1-3,一种机制馒头蜘蛛手自动抓取模具,所述每套抓取模具包括第一夹板1和第二夹板2,所述第一夹板1和第二夹板2均由弧形夹取位2-1、固定板2-2、安装位3组成,所述弧形夹取位2-1是对称向里的,可以根据馒头的大小来进行制作,所述弧形夹取位2-1不得高于馒头生胚的二分之一,这样能够保证弧形夹取位2-1在抓取馒头时保持馒头的形状不发生变化,所述固定板2-2设置在所述弧形夹取位2-1的上方,并且在所述固定板2-2上表面中间位置设置可以根据馒头大小来进行夹具间距调节的安装位3,所述安装位3为条形孔,这样可以在抓取大小不同的馒头时方便调节抓取模具与工作气缸之间的相对位置,所述抓取模具的第一夹板1和第二夹板2上设置的固定板2-2为同向,这样在节省安装空间的同时还能够实现多套模具同时工作,所述抓取模具表面喷涂有铁氟龙涂层,避免抓取模具在将抓起的馒头放入钢盘时粘连模具。
21.本实用新型的工作原理:在使用本实用新型的机制馒头蜘蛛手抓取模具抓取机制馒头时,首先,根据馒头成型机的类型安装1套或多套馒头抓取模具,每套抓取模具中起加固作用的两个固定板2-2设置同一个方向,如图2所示,样在保证节省安装空间的同时还能够实现多套模具同时工作;然后,根据馒头的大小通过安装位3来调节抓取模具与工作气缸之间的相对位置;最后,通过工作气缸伸缩推动抓取模具运动到馒头的放置位开始对馒头进行抓取,抓取模具的第一夹板1和第二夹板2上的弧形夹取位2-1随着工作气缸的伸缩张开,由于抓取模具表面涂有铁氟龙涂层,在铁氟龙涂层的作用下,可以实现馒头快速完整的放入钢盘内。
22.以上所述仅为本实用新型的优选实施例而已,并不用于限定本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种机制馒头蜘蛛手自动抓取模具,其特征在于,所述每套模具包括第一夹板(1)和第二夹板(2),所述第一夹板(1)和第二夹板(2)均由弧形夹取位(2-1)、固定板(2-2)、安装位(3)组成,所述弧形夹取位(2-1)是对称向里的,所述固定板(2-2)设置在所述弧形夹取位(2-1)的上方,所述固定板(2-2)上表面中间位置设置有安装位(3)。2.根据权利要求1所述的一种机制馒头蜘蛛手自动抓取模具,其特征在于,所述弧形夹取位(2-1)不得高于馒头生胚的二分之一。3.根据权利要求1所述的一种机制馒头蜘蛛手自动抓取模具,其特征在于,所述安装位(3)可以根据馒头的大小来进行夹具间距的调节。4.根据权利要求1所述的一种机制馒头蜘蛛手自动抓取模具,其特征在于,所述模具的固定板(2-2)设置为同向。5.根据权利要求1所述的一种机制馒头蜘蛛手自动抓取模具,其特征在于,所述安装位(3)设置为条形孔。6.根据权利要求1所述的一种机制馒头蜘蛛手自动抓取模具,其特征在于,所述模具表面喷涂有铁氟龙涂层。
技术总结
本实用新型公开了一种机制馒头蜘蛛手自动抓取模具,其特征在于,所述每套模具包括第一夹板第二夹板,所述第一夹板和第二夹板均由弧形夹取位、固定板、安装位组成,所述弧形夹取位是对称向里的,所述固定板设置在所述弧形夹取位的上方,所述固定板上表面中间位置设置有安装位。本实用新型的机制馒头抓取模具采用弧形夹取位,且弧形夹取位对称向里对馒头进行抓取,这种设计使该模具更贴近馒头的形状,抓取馒头时更加稳定,在馒头放入钢盘时抓手模具表面涂有铁氟龙涂层,使馒头能够迅速地与模具脱离,使馒头抓取速度由780个/分钟,提升到1140个/分钟,效率提升30%左右,馒头抓取更加稳定相应地减少了馒头的次品率。相应地减少了馒头的次品率。相应地减少了馒头的次品率。
技术研发人员:徐兵 王拴欣 赵航
受保护的技术使用者:思念食品有限公司
技术研发日:2021.07.12
技术公布日:2022/1/26