1.本实用新型涉及焦炉巡检机器人技术领域,具体为一种焦炉巡检机器人。
背景技术:
2.焦炉,一种通常由耐火砖和耐火砌块砌成的炉子,用于使煤炭化以生产焦炭,用煤炼制焦炭的窑炉,是炼焦的主要热工设备,现代焦炉是指以生产冶金焦为主要目的、可以回收炼焦化学产品的水平室式焦炉,由炉体和附属设备构成,焦炉炉体由炉顶、燃烧室和炭化室、斜道区、蓄热室等部分,并通过烟道和烟囱相连,整座焦炉砌筑在混凝土基础上,现代焦炉基本结构大体相同,但由于装煤方式、供热方式和使用的燃料不尽相同,又可以分成许多类型,炼焦的主要热工装置由炭化室、燃烧室、蓄热室、斜道区、炉顶、基础、烟道等组成,炭化室中煤料在隔绝空气条件下受热变成焦炭,一座焦炉有几十个炭化室和燃烧室相间配置,用耐火材料(硅砖)隔开,每个燃烧室有20~30个立火道,来自蓄热室的经过预热的煤气(高热值煤气不预热)和空气在立火道底部相遇燃烧,从侧面向炭化室提供热量,蓄热室位于焦炉的下部,利用高温废气来预热加热用的煤气和空气,斜道区是连接蓄热室和燃烧室的斜通道,炭化室、燃烧室以上的炉体称炉顶,其厚度按炉体强度和降低炉顶表面温度的需要确定,炉顶区有装煤孔和上升管孔通向炭化室,用以装入煤料和导出煤料干馏时产生的荒煤气,还设有看火孔通向每个火道,供测温、检查火焰之用,根据检测结果,调节温度和压力,整座焦炉砌筑在坚固平整的混凝土基础上,每个蓄热室通过废气盘与烟道连接,烟道设在基础内或基础两侧,一端与烟囱连接。
3.随着社会的进步,时代的发展和工业的进步,对煤炭的需求较高在生产煤炭时会伴随着高温、高危、有毒、有爆炸危险的现象,无疑就需要工频繁进入到现场巡,不仅增加的工人的劳动强度,也增加了工人危险系数,同时享有的巡检机器人不能适应高温、高危、有毒、有爆炸危险的环境下使用。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本实用新型提供了一种焦炉巡检机器人,解决了现有工业对煤炭的需求较高在生产煤炭时会伴随着高温、高危、有毒、有爆炸危险的现象,无疑就需要工人频繁进入到现场巡视,不仅增加了工人的劳动强度,也增加了工人危险系数,同时现有的巡检机器人不能适应高温、高危、有毒、有爆炸危险的环境下使用问题。
6.(二)技术方案
7.为实现以上目的,本实用新型通过以下技术方案予以实现:一种焦炉巡检机器人,包括装置主体,所述装置主体包括视觉相机、悬挂结构、驱动结构、运行指示灯、非接触无线充电装置、机器人主控舱体和内置辅助相机,所述视觉相机的一侧设置有机器人主控舱体,所述机器人主控舱体的上方设置有驱动结构,所述驱动结构的两侧均设置有悬挂结构,所述悬挂结构的一侧设置有固定限位装置。
8.优选的,所述悬挂结构呈对称式分布,所述固定限位装置的下侧设置有驱动结构,所述固定限位装置的下方设置有机器人主控舱体。
9.优选的,所述机器人主控舱体的一侧均匀分布有多个运行指示灯,所述机器人主控舱体的另一侧设置有内置辅助相机。
10.优选的,所述视觉相机的一侧设置有散热孔,所述散热孔设置在机器人主控舱体的外壁一侧,所述机器人主控舱体底部设置有非接触无线充电装置。
11.优选的,所述非接触无线充电装置的驱动端与机器人主控舱体的底部固定连接。
12.优选的,所述悬挂结构的上方设置有运行轨道,所述运行轨道的一侧设置有轨道连接螺丝,所述悬挂结构悬挂于运行轨道上。
13.优选的,视觉相机、驱动结构、运行指示灯、非接触无线充电装置、机器人主控舱体和内置辅助相机之间线性连接且之间设置有控制开关。
14.(三)有益效果
15.本实用新型提供了一种焦炉巡检机器人。具备以下有益效果:
16.(1)、该焦炉巡检机器人,在实际的使用过程中,该巡检机器人是基于工业自动化控制和机器视觉、防爆仪表以及人工智能深度学习的智能设备,主要解决进入高温、高危、有毒、有爆炸危险的环境下,人工巡检发现问题不及时,避免因设备故障发生安全事故,影响安全生产,极大程度上降低工人的劳动强度,同时提高了安全性能的巡检机器人。
17.(3)、该焦炉巡检机器人,因巡检机器人基于工业自动化控制、机器视觉、人工智能、深度学习、多传感器融合、物联网等诸多关键技术,实现了焦炉烟道开闭器、扇形轮、链条、拉杆等关键部位的全天候无人值守自动化巡检,替代了人工巡检,解决了高危环境下人工巡检发现问题不及时,数据不共享等弊端,提高生产效率,提升产业自动化水平。
附图说明
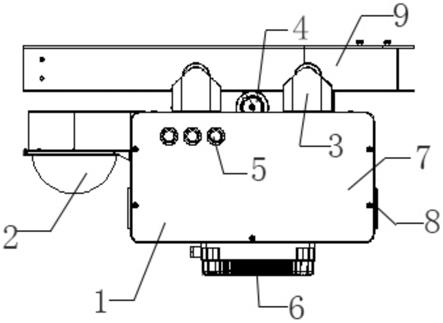
18.图1为本实用新型整体的结构示意图;
19.图2为本实用新型整体的俯视图;
20.图3为本实用新型整体的前视图。
21.图中,1
‑
装置主体、2
‑
视觉相机、3
‑
悬挂结构、4
‑
驱动结构、5
‑
运行指示灯、6
‑
非接触无线充电装置、7
‑
机器人主控舱体、8
‑
内置辅助相机、9
‑
运行轨道、10
‑
固定限位装置、11
‑
散热孔、12
‑
轨道连接螺丝。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1
‑
3,本实用新型实施例提供一种技术方案:一种焦炉巡检机器人,包括装置主体1,所述装置主体1包括视觉相机2、悬挂结构3、驱动结构4、运行指示灯5、非接触无线充电装置6、机器人主控舱体7和内置辅助相机8,所述视觉相机2的一侧设置有机器人主控舱体7,所述机器人主控舱体7的上方设置有驱动结构4,所述驱动结构4的两侧均设置有
悬挂结构3,所述悬挂结构3的一侧设置有固定限位装置10。
24.优选的,所述悬挂结构3呈对称式分布,所述固定限位装置10的下侧设置有驱动结构4,所述固定限位装置10的下方设置有机器人主控舱体7,所述机器人主控舱体7的一侧均匀分布有多个运行指示灯5,所述机器人主控舱体7的另一侧设置有内置辅助相机8,所述视觉相机2的一侧设置有散热孔11,所述散热孔11设置在机器人主控舱体7的外壁一侧,所述机器人主控舱体7底部设置有非接触无线充电装置6。
25.所述非接触无线充电装置6的驱动端与机器人主控舱体7的底部固定连接,所述悬挂结构3的上方设置有运行轨道9,所述运行轨道9的一侧设置有轨道连接螺丝12,所述悬挂结构3悬挂于运行轨道9上,视觉相机2、驱动结构4、运行指示灯5、非接触无线充电装置6、机器人主控舱体7和内置辅助相机8之间线性连接且之间设置有控制开关。
26.需要说明的是,该一种焦炉巡检机器人,在使用时需将该装置主体1安装在,需要安装的位置,同时,通过机器人主控舱体7控制视觉相机2、驱动结构4、运行指示灯5、非接触无线充电装置6和内置辅助相机8的运行,在发生故障时可通过视觉相机2与内置辅助相机8以深度学习算法的识别分析,通过机器人主控舱体7内部元件传至终端,做到及时报警,同时由机器人自动控制程序控制机器人及时停车,或改变运行策略以确保巡检过程的完整性与及时性,机器人按照既定程序采集相关数据,通过深度学习等相关技术进行巡检任务。
27.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
28.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。