1.本发明涉及汽车占位器技术领域,具体涉及一种带图像识别的停车位智能占位系统。
背景技术:
2.在很多小区或者办公园区内,停车位是直接出售给用户的专用停车位,购买了停车位的用户不希望自己外出期间停车位被不知情的其他人占用。为了使得其他人明白自己的停车位是私人专用停车位,用户一般在停车位上安装地锁。地锁虽然能够满足停车位占位的功能,但是现有技术的地锁均为机械式地锁,在停车前需要司机先下车,蹲下身子,开锁,起身,上车,锁门,开进。开车离开后还需要停车,开门,蹲下,锁好,起身、上车离开;使用不方便。
3.手动地桩的优点是:便宜、简单易操作,市场售价从十几元到几十元不等;其缺点是使用不方便,操作步骤繁琐。
4.因此,对于本领域技术人员来说,如何提供一种带图像识别的停车位智能占位系统,以至少部分的改善或解决现有的手动地桩的缺点或存在的技术问题,这具有比较现实的意义。
技术实现要素:
5.针对现有技术的不足,本发明的目的在于提供一种带图像识别的停车位智能占位系统,以至少部分的改善或解决现有的手动地桩的缺点或存在的技术问题。
6.为解决上述问题,本发明提供一种带图像识别的停车位智能占位系统,包括伸缩占位组件、伸缩驱动机构、图像识别组件和控制器,所述伸缩占位组件包括活动占位档杆和固定底座,所述固定底座埋藏于停车位的地面以下且位于停车位的中部,所述固定底座上设有容纳凹槽,所述活动占位档杆可上、下移动的安装在固定底座的容纳凹槽上;伸缩驱动机构安装在固定底座上,伸缩驱动机构用于驱动所述活动占位档杆伸出和缩回所述容纳凹槽以实现所述活动占位档杆能够在占位姿态和避让姿态之间切换,所述活动占位档杆的顶部设有距离传感器,所述距离传感器用于测量活动占位档杆上方物体与活动占位档杆之间的距离,所述图像识别组件设于停车位的后侧,所述图像识别组件包括支撑底座和设在支撑底座上的图像识别器,所述图像识别器用于扫描识别前方车辆的车牌号,所述图像识别器、距离传感器、伸缩驱动机构分别与所述控制器连接,所述控制器根据所述图像识别器和距离传感器的检测信号控制伸缩驱动机构动作。
7.作为上述带图像识别的停车位智能占位系统的进一步改进,所述活动占位档杆或所述固定底座上设有蓄电池,所述图像识别器、距离传感器、伸缩驱动机构、控制器均与所述蓄电池连接,所述蓄电池为图像识别器、距离传感器、伸缩驱动机构、控制器供电。
8.作为上述带图像识别的停车位智能占位系统的进一步改进,所述控制器包括存储模块,所述存储模块上存储有车牌号信息,若所述图像识别器扫描到的车牌号信息与控制
器上存储的车牌号信息匹配,所述活动占位档杆由占位姿态切换至避让姿态。
9.作为上述带图像识别的停车位智能占位系统的进一步改进,若所述图像识别器扫描到的车牌号信息与控制器上存储的车牌号信息不匹配或者图像识别器未扫描到车牌号信息,且所述距离传感器测量得到活动占位档杆上方物体与活动占位档杆之间的距离大于预设值,所述活动占位档杆由避让姿态切换至占位姿态。
10.作为上述带图像识别的停车位智能占位系统的进一步改进,若所述图像识别器扫描到的车牌号信息与控制器上存储的车牌号信息不匹配或者图像识别器未扫描到车牌号信息,且所述距离传感器测量得到活动占位档杆上方物体与活动占位档杆之间的距离大于预设值的持续时间超过预设时间,所述活动占位档杆由避让姿态切换至占位姿态。
11.作为上述带图像识别的停车位智能占位系统的进一步改进,还包括无线信号通讯模块,所述无线信号通讯模块与所述控制器连接,所述控制器根据无线信号通讯模块的接收信号修改存储模块上的车牌号信息。
12.作为上述带图像识别的停车位智能占位系统的进一步改进,所述伸缩驱动机构为电动推杆,所述电动推杆的固定端连接固定底座,所述电动推杆的动力输出端连接活动占位档杆。
13.作为上述带图像识别的停车位智能占位系统的进一步改进,所述控制器为单片机。
14.作为上述带图像识别的停车位智能占位系统的进一步改进,所述距离传感器为超声波测距传感器或红外线测距传感器或雷达测距传感器。
15.作为上述带图像识别的停车位智能占位系统的进一步改进,所述图像识别器为车牌识别摄像机。
16.本发明的带图像识别的停车位智能占位系统,图像识别器、距离传感器、伸缩驱动机构分别与所述控制器连接,所述控制器根据所述图像识别器和距离传感器的检测信号控制伸缩驱动机构驱动所述活动占位档杆升降以实现所述活动占位档杆能够在占位姿态和避让姿态之间往复切换,由此利用图像识别器和距离传感器智能识别是否具有车辆进入停车位以及进入停车位的车辆是否属于车位主人,在车位主人驾车驶离停车位时自动占据车位,在车位主人驾车回归停车位时自动让出车位,使用方便,自动化程度高。
附图说明
17.下面结合附图和实施例对本发明进一步说明。
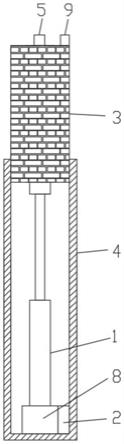
18.图1为根据本发明一个实施例的伸缩占位组件在活动占位档杆处于升起状态时的结构示意图。
19.图2为根据本发明一个实施例的伸缩占位组件在活动占位档杆处于下降状态时的结构示意图。
20.图3为根据本发明一个实施例的图像识别组件的结构示意图。
21.图4为根据本发明一个实施例的带图像识别的停车位智能占位系统在活动占位档杆处于升起状态时的结构示意图。
22.图5为根据本发明一个实施例的带图像识别的停车位智能占位系统在活动占位档杆处于下降状态时的结构示意图。
23.图6为根据本发明一个实施例的带图像识别的停车位智能占位系统的控制系统框架示意图。
24.图7为根据本发明一个实施例的带图像识别的停车位智能占位系统的控制系统框架示意图。
25.附图中:
26.1-伸缩驱动机构
ꢀꢀꢀꢀꢀꢀꢀꢀ
2-控制器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3-活动占位档杆
27.4-固定底座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5-距离传感器
ꢀꢀꢀꢀꢀꢀꢀ
6-支撑底座
28.7-图像识别器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8-蓄电池
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
9-无线信号通讯模块
具体实施方式
29.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
30.请参阅附图。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
31.在本发明的描述中,需要说明的是,出现的术语所指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。在本发明的描述中,需要说明的是,除非另有明确的规定和限定,否则对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
32.请参阅图1至图7所示,本发明提供一种带图像识别的停车位智能占位系统,包括伸缩占位组件、伸缩驱动机构1、图像识别组件和控制器2,所述伸缩占位组件包括活动占位档杆3和固定底座4,所述固定底座4埋藏于停车位的地面以下且位于停车位的中部,所述固定底座4上设有容纳凹槽,所述活动占位档杆3可上、下移动的安装在固定底座4的容纳凹槽上;伸缩驱动机构1安装在固定底座4上,伸缩驱动机构1用于驱动所述活动占位档杆3伸出和缩回所述容纳凹槽以实现所述活动占位档杆3能够在占位姿态和避让姿态之间切换,所述活动占位档杆3的顶部设有距离传感器5,所述距离传感器5用于测量活动占位档杆3上方物体与活动占位档杆3之间的距离,所述图像识别组件设于停车位的后侧,所述图像识别组件包括支撑底座6和设在支撑底座6上的图像识别器7,所述图像识别器7用于扫描识别前方车辆的车牌号,所述图像识别器7、距离传感器5、伸缩驱动机构1分别与所述控制器2连接,所述控制器2根据所述图像识别器7和距离传感器5的检测信号控制伸缩驱动机构1动作。
33.其中,伸缩驱动机构1可以为电动推杆,当伸缩驱动机构1为电动推杆时,电动推杆的固定端连接固定底座4,电动推杆的动力输出端连接活动占位档杆3。控制器2可以为单片机。距离传感器5可以为超声波测距传感器,也可以为红外线测距传感器,还可以为雷达测距传感器。所述图像识别器7可以为车牌识别摄像机,车牌识别摄像机获取图像后通过的控制器2进行识别车牌和匹配。需要说明的是,伸缩占位组件和图像识别组件的位置需要适当错位,比如高度方向上错位或者左右方向上错位,以避免伸缩占位组件对图像识别组件造
成遮挡甚至使得图像识别组件无法扫描车牌号。活动占位档杆3和固定底座4之间可以滑动摩擦配合,也可以为滚动摩擦配合,为了提高活动占位档杆3相对固定底座4上下移动的顺畅性和减小运动阻力,活动占位档杆3和固定底座4之间为滚动摩擦配合。
34.本发明的工作原理,在车位主人外出期间,伸缩驱动机构1驱动活动占位档杆3升起,起到占位作用,其他司机在看见活动占位档杆3后即可明白该车位属于他人已经占有的车位。在此期间,图像识别器7扫描识别前方车辆的车牌号,当前方车辆的车牌号与控制器2中预存的车牌号匹配时,意味着车位主人驾车回来,伸缩驱动机构1驱动活动占位档杆3下降,活动占位档杆3由占位姿态切换至避让姿态,以实现与车辆的避让,方便车位主人停车。车位主人停车就位后,距离传感器5持续检测活动占位档杆3上方物体与活动占位档杆3之间的距离,当活动占位档杆3上方物体与活动占位档杆3之间的距离小于预设值时,控制器2判断车辆停放在停车位并控制活动占位档杆3保持下降状态,当活动占位档杆3上方物体与活动占位档杆3之间的距离大于或等于预设值时,控制器2结合图像识别器7的信息判断车辆是否已驶离停车位并控制活动占位档杆3升起,活动占位档杆3由避让姿态切换至占位姿态。
35.由上述内容可知,本发明的带图像识别的停车位智能占位系统,图像识别器7、距离传感器5、伸缩驱动机构1分别与所述控制器2连接,所述控制器2根据所述图像识别器7和距离传感器5的检测信号控制伸缩驱动机构1驱动所述活动占位档杆3升降以实现所述活动占位档杆3能够在占位姿态和避让姿态之间往复切换,由此利用图像识别器7和距离传感器5智能识别是否具有车辆进入停车位以及进入停车位的车辆是否属于车位主人,在车位主人驾车驶离停车位时自动占据车位,在车位主人驾车回归停车位时自动让出车位,使用方便,自动化程度高。
36.本发明的带图像识别的停车位智能占位系统既可以外接电源,也可以采用蓄电池8供电,在一种具体实施例中,所述活动占位档杆3或所述固定底座4上设有蓄电池8,所述图像识别器7、距离传感器5、伸缩驱动机构1、控制器2均与所述蓄电池8连接,所述蓄电池8为图像识别器7、距离传感器5、伸缩驱动机构1、控制器2供电。
37.具体可选的,所述伸缩占位组件位于停车位的中部。需要说明的是,距离传感器5、伸缩驱动机构1和控制器2等零部件可以通过支撑、螺栓等方式固定在伸缩占位组件上,由于固定方式属于现有技术,在此不作具体展开。
38.在一种具体可选的实施例中,所述控制器2包括存储模块,所述存储模块上存储有车牌号信息,若所述图像识别器7扫描到的车牌号信息与控制器2上存储的车牌号信息匹配,所述活动占位档杆3由占位姿态切换至避让姿态。
39.对于一些缺乏经验的司机,可能需要多次倒车才能把车辆停放入库,同时驾驶员可能伫立在车辆与伸缩占位组件之间对车辆进行观察造成对图像识别器7的遮挡,为了避免活动占位档杆3频繁的变换姿态以及误操作,优选的,在所述活动占位档杆3处于避让姿态时,若所述图像识别器7扫描到的车牌号信息与控制器2上存储的车牌号信息不匹配或者图像识别器7未扫描到车牌号信息,且所述距离传感器5测量得到活动占位档杆3上方物体与活动占位档杆3之间的距离大于预设值,所述活动占位档杆3由避让姿态切换至占位姿态。这样,活动占位档杆3执行由避让姿态切换至占位姿态的动作,需要同时满足两个条件:第一个条件是所述图像识别器7扫描到的车牌号信息与控制器2上存储的车牌号信息不匹
配或者图像识别器7未扫描到车牌号信息,第二个条件是所述距离传感器5测量得到活动占位档杆3上方物体与活动占位档杆3之间的距离大于预设值,上述两个条件缺一不可,否则若所述距离传感器5测量得到活动占位档杆3上方物体与活动占位档杆3之间的距离小于或等于预设值或者所述图像识别器7扫描到的车牌号信息与控制器2上存储的车牌号信息匹配,所述活动占位档杆3保持避让姿态。
40.上述实施例中,可能存在这样的情形,有人在现场指挥停车,并且指挥者正好伫立在车辆与伸缩占位组件之间对车辆进行观察造成对图像识别器7的遮挡,这个时候所述距离传感器5测量得到活动占位档杆3上方物体与活动占位档杆3之间的距离小于或等于预设值且所述图像识别器7未扫描到车牌号信息,然而这个时候使得活动占位档杆3保持占位姿态是不合适的,为了改善这种情况,更为优选的,若所述图像识别器7扫描到的车牌号信息与控制器2上存储的车牌号信息不匹配或者图像识别器7未扫描到车牌号信息,且所述距离传感器5测量得到活动占位档杆3上方物体与活动占位档杆3之间的距离大于预设值的持续时间超过预设时间,所述活动占位档杆3由避让姿态切换至占位姿态,预设时间可以根据实际需要进行设定,可以是半分钟,也可以是一分钟。
41.由于停车位可能存在转让以及出租情况,为了便于变更车牌号信息,优选的,还包括无线信号通讯模块9,所述无线信号通讯模块9与所述控制器2连接,所述控制器2包括存储模块,所述存储模块上存储有车牌号信息,所述控制器2根据无线信号通讯模块9的接收信号修改存储模块上的车牌号信息,这样,用户可以将手中的手机、平板电脑等与无线信号通讯模块9建立连接,控制器2根据无线信号通讯模块9的接收信号修改存储模块上的车牌号信息。无线信号通讯模块9可以为蓝牙模块、也可以为wifi模块,无线信号通讯模块9优选设置在活动占位档杆3顶部。图像识别器7可以有线或无线的方式与控制器2建立连接,如图像识别器7可以内置wifi及蓝牙模块。
42.综上所述,本发明的带图像识别的停车位智能占位系统,图像识别器7、距离传感器5、伸缩驱动机构1分别与所述控制器2连接,所述控制器2根据所述图像识别器7和距离传感器5的检测信号控制伸缩驱动机构1驱动所述活动占位档杆3升降以实现所述活动占位档杆3能够在占位姿态和避让姿态之间往复切换,由此利用图像识别器7和距离传感器5智能识别是否具有车辆进入停车位以及进入停车位的车辆是否属于车位主人,在车位主人驾车驶离停车位时自动占据车位,在车位主人驾车回归停车位时自动让出车位,使用方便,自动化程度高。
43.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。