1.本发明涉及钢筋加工相关技术领域,特别涉及一种箱梁生产用智能钢筋折弯、堆放、绑扎机器人。
背景技术:
2.钢筋混凝土结构的箱梁分为预制箱梁和现浇箱梁,在独立场地预制的箱梁结合架桥机可在下部工程完成后进行架设,可加速工程进度、节约工期,现浇箱梁多用于大型连续桥梁,常见的以材料分,主要有两种,一是预应力钢筋砼箱梁,一是钢箱梁,其中,预应力钢筋砼箱梁为现场施工,除了有纵向预应力外,有些还设置横向预应力,对于箱梁内部钢筋的加工需要专门的设备进行作业。
3.在中国发明专利申请号:cn201811015639.1中公开有一种建筑场地用钢筋锚固机器人,该建筑场地用钢筋锚固机器人,虽然,减轻了人们手动搬运钢筋,减少了人们的体力劳动,且可以保持钢筋完全处于90度,保证了工作的成功率,提高了工作效率,但是,该建筑场地用钢筋锚固机器人,不具备对钢筋框架网络交叉点进行全方位钢丝绑扎的功能,装置的使用存在局限性,不便于对钢筋进行弯折和堆放的功能,自动化程度低。
4.因此,提出一种箱梁生产用智能钢筋折弯、堆放、绑扎机器人来解决上述问题很有必要。
技术实现要素:
5.针对现有技术的不足,本发明提供了一种箱梁生产用智能钢筋折弯、堆放、绑扎机器人,解决了不具备对钢筋框架网络交叉点进行全方位钢丝绑扎的功能,装置的使用存在局限性,不便于对钢筋进行弯折和堆放的功能,自动化程度低的问题。
6.为实现以上目的,本发明通过以下技术方案予以实现:一种箱梁生产用智能钢筋折弯、堆放、绑扎机器人,包括底板和主控单元,所述底板的上表面开设有用于安装两个第一导轨的通槽,两个所述第一导轨的外表面活动连接有第一驱动器,两个所述第一驱动器的内壁底部固定连接有连接板,所述连接板的上表面固定安装有第二导轨,所述第二导轨的上表面活动连接有第二驱动器,所述第二驱动器的上表面设有第一绑扎机;所述底板靠近第三导轨的一侧上表面对称固定安装有支撑板,多个所述支撑板的上表面固定连接有顶板,两个所述顶板的上表面固定连接有承接板;所述底板的一侧下表面设有转向机,所述转向机的下表面设有转向轮,所述底板的一侧下表面设有驱动机,所述驱动机的外表面对称设有驱动轮,所述主控单元的内部设有钢筋弯折模块、钢筋堆放模块、钢筋绑扎模块、驱动模块、信息处理模块、中央处理器、电源模块和信号发射模块,所述信号发射模块的输出端连接有钢筋弯折系统、钢筋堆放系统、钢筋绑扎系统和驱动系统。
7.可选的,所述底板的下表面对称固定安装有第三导轨,多个所述第三导轨的外表
面设有第三驱动器。
8.可选的,多个所述第三驱动器的外壁固定连接有安装板,两个所述安装板的外表面固定安装有第四导轨,两个所述第四导轨的外表面设有第二绑扎机。
9.可选的,所述底板的上表面对称设有驱动轴,多个所述驱动轴的外表面活动连接有传送带。
10.可选的,所述承接板的一侧上表面设有第一机械臂,所述第一机械臂的顶端设有钢筋弯折盘。
11.可选的,所述承接板远离第一机械臂的一侧上表面设有第二机械臂,所述第二机械臂的顶端设有电磁吸板。
12.可选的,所述钢筋弯折模块、钢筋堆放模块、钢筋绑扎模块和驱动模块的输出端均与信息处理模块的输入端连接。
13.可选的,所述中央处理器的输出端与信号发射模块的输入端连接,所述电源模块用于为装置的用电设备提供电力。
14.可选的,所述钢筋弯折模块用于控制钢筋弯折盘的启停,所述钢筋堆放模块用于控制电磁吸板的启停。
15.本发明提供了一种箱梁生产用智能钢筋折弯、堆放、绑扎机器人,具备以下有益效果:1、本发明第一驱动器通过沿着第一导轨进行移动,钢筋框架放置在传送带的上表面,实现将钢筋框架沿着通槽的上方进行移动,第一绑扎机与钢筋框架的底部相接触,实现对钢筋框架底部网络交叉点的钢丝绑扎,能够有效提升对钢筋绑扎的效率,降低工人的劳动强度。
16.2、本发明通过启动第三驱动器,带动安装板一同沿着第三导轨移动,在此过程中,第二绑扎机通过第四导轨的配合,实现沿着安装板一同移动,并通过第三驱动器的配合,实现对钢筋框架侧边的绑扎,能够进一步提升装置对钢筋框架的绑扎效率,实现全方位钢丝绑扎。
17.3、本发明顶板通过对承接板的支撑固定,实现对第一机械臂和第二机械臂的支撑固定,第一机械臂和第二机械臂为智能多角度转向机器人,通过钢筋弯折盘对钢筋进行弯折,并通过电磁吸板的移动实现对钢筋的堆垛转移,能够有效提升装置的使用多样性,适用于多种作业场景。
18.4、本发明通过设置主控单元,在钢筋弯折模块、钢筋堆放模块、钢筋绑扎模块、驱动模块、信息处理模块和信号发射模块的配合作用下,并通过中央处理器的智能感应,实现对钢筋弯折系统、钢筋堆放系统、钢筋绑扎系统和驱动系统的自动化控制,从而实现对装置电气系统的控制,能够有效提升装置的自动化程度,降低人工劳动成本。
附图说明
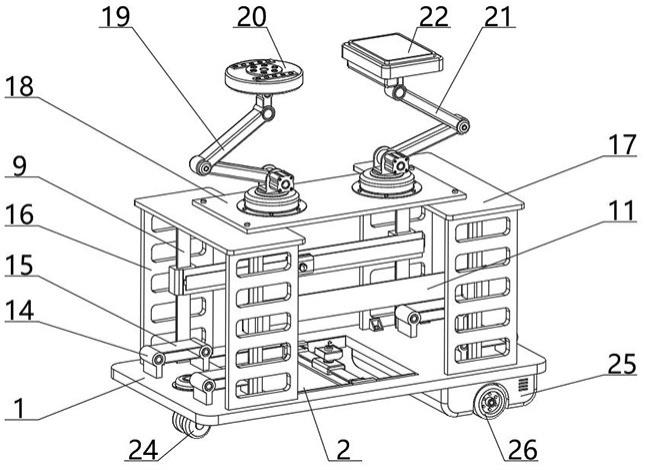
19.图1为本发明结构的立体示意图;图2为本发明结构的立体剖视示意图;图3为本发明图2中a区结构的放大示意图;图4为本发明图2中b区结构的放大示意图;
图5为本发明机器人控制系统的模块示意图。
20.图中:1、底板;2、通槽;3、第一导轨;4、第一驱动器;5、连接板;6、第二导轨;7、第二驱动器;8、第一绑扎机;9、第三导轨;10、第三驱动器;11、安装板;12、第四导轨;13、第二绑扎机;14、驱动轴;15、传送带;16、支撑板;17、顶板;18、承接板;19、第一机械臂;20、钢筋弯折盘;21、第二机械臂;22、电磁吸板;23、转向机;24、转向轮;25、驱动机;26、驱动轮;27、主控单元;28、钢筋弯折系统;29、钢筋堆放系统;30、钢筋绑扎系统;31、驱动系统;32、钢筋弯折模块;33、钢筋堆放模块;34、钢筋绑扎模块;35、驱动模块;36、信息处理模块;37、中央处理器;38、电源模块;39、信号发射模块。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.根据如图1-5所示,本发明提供了一种技术方案:一种箱梁生产用智能钢筋折弯、堆放、绑扎机器人,包括底板1和主控单元27,底板1的上表面开设有用于安装两个第一导轨3的通槽2,两个第一导轨3的外表面活动连接有第一驱动器4,两个第一驱动器4的内壁底部固定连接有连接板5,连接板5的上表面固定安装有第二导轨6,第二导轨6的上表面活动连接有第二驱动器7,第二驱动器7的上表面设有第一绑扎机8;底板1靠近第三导轨9的一侧上表面对称固定安装有支撑板16,多个支撑板16的上表面固定连接有顶板17,两个顶板17的上表面固定连接有承接板18;底板1的一侧下表面设有转向机23,转向机23的下表面设有转向轮24,底板1的一侧下表面设有驱动机25,驱动机25的外表面对称设有驱动轮26,主控单元27的内部设有钢筋弯折模块32、钢筋堆放模块33、钢筋绑扎模块34、驱动模块35、信息处理模块36、中央处理器37、电源模块38和信号发射模块39,信号发射模块39的输出端连接有钢筋弯折系统28、钢筋堆放系统29、钢筋绑扎系统30和驱动系统31。
23.作为本发明的一种可选技术方案:底板1的下表面对称固定安装有第三导轨9,多个第三导轨9位于同一水平面,便于第三驱动器10沿着第三导轨9进行升降,多个第三导轨9的外表面设有第三驱动器10。
24.作为本发明的一种可选技术方案:多个第三驱动器10的外壁固定连接有安装板11,两个安装板11的外表面固定安装有第四导轨12,两个第四导轨12的外表面设有第二绑扎机13,两个第二绑扎机13与第四导轨12呈滑动连接设置,通过与第三导轨9和第三驱动器10的配合,实现对钢筋框架侧边的全方位绑扎。
25.作为本发明的一种可选技术方案:底板1的上表面对称设有驱动轴14,多个驱动轴14位于同一水平面,通过将钢筋框架放置在传送带15的上表面,启动驱动轴14带动传送带15转动,实现对钢筋框架的转运,多个驱动轴14的外表面活动连接有传送带15。
26.作为本发明的一种可选技术方案:承接板18的一侧上表面设有第一机械臂19,第一机械臂19的顶端设有钢筋弯折盘20,钢筋弯折盘20用于对单根钢筋的弯折。
27.作为本发明的一种可选技术方案:承接板18远离第一机械臂19的一侧上表面设有第二机械臂21,第一机械臂19和第二机械臂21均采用为智能多轴机械臂,第二机械臂21的顶端设有电磁吸板22,通过启动电磁吸板22,并通过第二机械臂21的配合,实现将堆垛的钢筋框架转移到存放区域。
28.作为本发明的一种可选技术方案:钢筋弯折模块32、钢筋堆放模块33、钢筋绑扎模块34和驱动模块35的输出端均与信息处理模块36的输入端连接。
29.作为本发明的一种可选技术方案:中央处理器37的输出端与信号发射模块39的输入端连接,电源模块38用于为装置的用电设备提供电力。
30.作为本发明的一种可选技术方案:钢筋弯折模块32用于控制钢筋弯折盘20的启停,钢筋堆放模块33用于控制电磁吸板22的启停,驱动模块35用于控制驱动机25的启停,实现带动驱动轮26转动,并通过转向机23和转向轮24的配合,实现装置的自主移动。
31.其中,钢筋弯折模块32通过将启动信号通过信号发射模块39传递给第一机械臂19,第一机械臂19开启,带动钢筋弯折盘20与相适配的钢筋接触,实现对钢筋的弯折,钢筋堆放模块33通过将启动信号通过信号发射模块39传递给第二机械臂21,第二机械臂21开启,并带动电磁吸板22与钢筋框架相对应,实现对钢筋框架的吸附,并通过第二机械臂21的配合转运到特定的位置,钢筋绑扎模块34通过将启动信号通过信号发射模块39传递给第一绑扎机8和第二绑扎机13,第一绑扎机8和第二绑扎机13启动,实现对相对应的钢筋框架网络进行绑扎,驱动模块35通过将启动信号通过信号发射模块39传递给驱动机25,驱动机25启动,带动驱动轮26转动,并通过转向机23和转向轮24的配合,使装置实现自主移动。
32.工作原理:在工作时,第一驱动器4通过沿着第一导轨3进行移动,实现带动连接板5进行移动,在此过程中,将钢筋框架放置在传送带15的上表面,通过启动驱动轴14,带动传送带15转动,实现将钢筋框架沿着通槽2的上方进行移动,与此同时,通过启动第二驱动器7,带动第一绑扎机8与钢筋框架的底部相接触,并通过第一驱动器4和第二驱动器7的配合,实现对钢筋框架底部网络交叉点的钢丝绑扎,通过启动第三驱动器10,带动安装板11一同沿着第三导轨9移动,在此过程中,第二绑扎机13通过第四导轨12的配合,实现沿着安装板11一同移动,并通过第三驱动器10的配合,实现对钢筋框架侧边的绑扎,顶板17通过对承接板18的支撑固定,实现对第一机械臂19和第二机械臂21的支撑固定,第一机械臂19和第二机械臂21为智能多角度转向机器人,通过钢筋弯折盘20对钢筋进行弯折,并通过电磁吸板22的移动实现对钢筋的堆垛转移。
33.综上所述:通过将钢筋框架放置在传送带15的上表面,通过启动驱动轴14,带动传送带15转动,实现将钢筋框架沿着通槽2的上方进行移动,与此同时,通过启动第二驱动器7,带动第一绑扎机8与钢筋框架的底部相接触,并通过第一驱动器4和第二驱动器7的配合,实现对钢筋框架底部网络交叉点的钢丝绑扎,能够有效提升对钢筋绑扎的效率,降低工人的劳动强度,通过启动第三驱动器10,带动安装板11一同沿着第三导轨9移动,在此过程中,第二绑扎机13通过第四导轨12的配合,实现沿着安装板11一同移动,并通过第三驱动器10的配合,实现对钢筋框架侧边的绑扎,能够进一步提升装置对钢筋框架的绑扎效率,实现全方位钢丝绑扎,第一机械臂19和第二机械臂21为智能多角度转向机器人,通过钢筋弯折盘20对钢筋进行弯折,并通过电磁吸板22的移动实现对钢筋的堆垛转移,能够有效提升装置的使用多样性,适用于多种作业场景,通过设置主控单元27,在钢筋弯折模块32、钢筋堆放
模块33、钢筋绑扎模块34、驱动模块35、信息处理模块36和信号发射模块39的配合作用下,并通过中央处理器37的智能感应,实现对钢筋弯折系统28、钢筋堆放系统29、钢筋绑扎系统30和驱动系统31的自动化控制,从而实现对装置电气系统的控制,能够有效提升装置的自动化程度,降低人工劳动成本。
34.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。