1.本发明涉及小型压路机技术,具体涉及一种手扶式压路机。
背景技术:
2.压路机是主要是一种对沥青混凝土进行定型压实,保证沥青混凝土路面的平整度,减少路面的轮机印的设备;主要用于道路维修和扩建,随着交通事业的发展,越来越多的道路需进行维修和扩建,小型压路机因体积小,操作灵敏,在较高的路沿间隙和较小的侧面间隙实用性特别强,所以需求也就越来越大。
3.在作业过程中,压路机需要对某些狭窄区域进行压实工作,此时大型压路机不再适用,在这种情况时选择一种手扶式压路机,其机身下方安装有来两个压辊,该机械依靠压辊在路面上行进,同时进行压实作业。
4.如授权公告号为cn103981792b,授权公告日为20171212,名称为《一种手扶式压路机》的发明专利,其包括至少带有引擎和排气管的行走装置,安装在上述行走装置上的钢轮,从上述行走装置后部向后方延伸的操作杆,覆盖上述行走装置前后部及两侧部的框架,覆盖上述框架上部的集机罩;上述排气管还至少包括:向上方向延伸并具有消音效果的上升部,和与上述上升部隔开距离配置的向下方向延伸的下降部,和将上述上升部及上述下降部的一端连接并在上下方向折返的折返部,以及从上述下降部的另一端向前侧延伸的延伸部,且上述排气管配置成使引擎的废气从上述行走装置或上述框架的前侧排出,上述集机罩具有集机罩本体和半球状突出部,该半球状突出部在上述集机罩本体一部分上朝上方突出;而上述折返部设置在上述突出部的内部。
5.现有技术的不足之处在于,压路机依靠辊压和振动进行压路操作,工作过程中,其振动直接通过手扶杆传递给了操作人员,使得操作人员的操作过程较为不舒适,不够人性化,理论上,手扶杆可以通过一个减振机构连接到压路机上,但是手扶杆主要用于转向操控以及行走过程中的位置把握,减振机构由于具有弹簧,使得手扶杆对压路机的操控出现了延迟和操控幅度的不可把握,这是不可接受的,如此现有技术不得不舍弃了减振机构,让手扶杆直接固接在了压路机上从而直接承受振动。
技术实现要素:
6.本发明的目的是提供一种手扶式压路机,以解决现有技术中的上述不足之处。
7.为了实现上述目的,本发明提供如下技术方案:
8.一种手扶式压路机,包括架体、辊筒以及手扶杆,所述手扶杆的一端通过减震机构连接于架体上,所述手扶杆的一端设置有第一插接部,所述手扶杆能够轴向活动,所述手扶杆在轴向活动行程具有一操作位置,在所述操作位置,所述手扶杆通过所述第一插接部与所述架体上的第二插接部相插接。
9.上述的手扶式压路机,所述减震机构包括固定套筒、活动套杆、以及第一弹簧和第二弹簧,所述活动套杆活动连接在固定套筒的内部,所述第一弹簧设置在固定套筒的内部,
所述第二弹簧设置在活动套杆的外部,所述活动套杆的一端和固定套筒的一端分别与手扶杆和方形管连接。
10.上述的手扶式压路机,还包括活动机构,所述活动机构包括设置有滑动槽的两个限位块,两个所述限位块之间设置有带有固定轴的方形套管,所述方形套管通过固定轴和滑动槽活动连接在两个限位块之间。
11.上述的手扶式压路机,所述滑动槽的上方活动设置有贯穿限位块的连接杆,所述连接杆的一端设置有绞盘,所述连接杆的外部设置有伴随绞盘转动的齿轮盘,所述绞盘与连接杆之间采用扭簧连接,扭簧带动连接杆用以提升或者复位挡块。
12.上述的手扶式压路机,所述手扶杆的一侧设置有摇把。
13.上述的手扶式压路机,所述限位块预制有空腔,在所述空腔内部活动的挡块设置有齿槽,所述齿轮盘通过齿槽与挡块啮合。
14.上述的手扶式压路机,所述齿轮盘位于限位块的预制空腔内,所述挡块在限位块的预制空腔内运动方式为上下移动。
15.上述的手扶式压路机,所述绞盘缠绕有拉丝,且拉丝的两端分别与摇把和绞盘连接。
16.上述的手扶式压路机,所述架体的上方设置有发动机,所述发动机连接有传动组件。
17.上述的手扶式压路机,所述架体的上方设置有驱动马达。
18.在上述技术方案中,本发明提供的手扶式压路机,手扶杆具有减震位置和操作位置,在跟车时,手扶杆通过减震机构得到减震,而当需要操控时,强行压迫手扶杆使的第一插接部与第二插接部相插接,如此消除减震机构对操控的负面影响。
附图说明
19.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
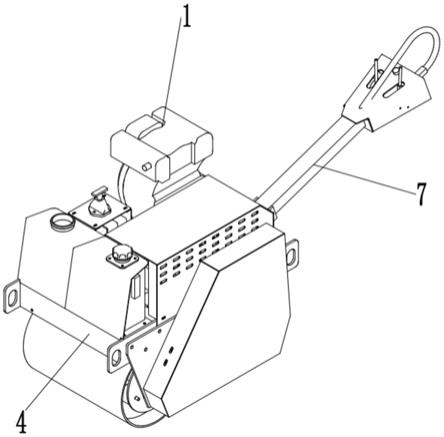
20.图1为本发明一种实施例提供的手扶式压路机的主视结构示意图。
21.图2为本发明一种实施例提供的手扶式压路机的侧视结构示意图。
22.图3为本发明一种实施例提供的手扶式压路机的减震机构结构示意图。
23.图4为本发明一种实施例提供的手扶式压路机的a的局部放大结构示意图。
24.图5为本发明一种实施例提供的手扶式压路机的挡块结构示意图。
25.图6为本发明一种实施例提供的手扶式压路机的限位块侧视剖面结构示意图。
26.图7为本发明一种实施例提供的手扶式压路机的第一插接部和第二插接部结构示意图。
27.图8为本发明一种实施例提供的手扶式压路机的架体侧视结构示意图。
28.图9为本发明一种实施例提供的手扶式压路机的架体俯视结构示意图。
29.图10为本发明一种实施例提供的手扶式压路机的清洁机构侧面剖视结构示意图。
30.图11为本发明一种实施例提供的手扶式压路机的储存箱和提升筒连接结构示意图。
31.附图标记说明:
32.1-发动机、3-辊筒、4-架体、5-连接杆、7-手扶杆、7.1-第一弹簧、7.2-固定套筒、7.3-第二弹簧、7.4-活动套杆、8-摇把、10-限位块、11-方形套管、12-固定轴、13-滑动槽、14-绞盘、15-齿轮盘、16-复位挡块、17-第一插接部、18-第二插接部、19-储存箱、20-主动轮、21-从动轮、22-驱动马达、23-传动杆、24-螺旋叶片、25-皮带轮、26-输送带、27-连接架、28-转动杆、29-提升筒。
具体实施方式
33.为了使本领域的技术人员更好地理解本发明的技术方案,下面将结合附图对本发明作进一步的详细介绍。
34.如图1-11所示,本发明实施例提供的一种手扶式压路机,包括架体4、辊筒3以及手扶杆7,所述手扶杆7的一端通过减震机构连接于架体上,所述手扶杆7的一端设置有第一插接部17,所述手扶杆7能够轴向活动,所述手扶杆7在轴向活动行程具有一操作位置,在所述操作位置,第一插接部17与所述架体上的第二插接部18相插接。
35.具体的本发明实施例提供的手扶式压路机,架体4、辊筒3以及手扶杆7均为现有技术,不一一赘述,本实施例的核心创新点在于,通过改变现有技术手扶杆7与架体4之间的固定连接方式,将压路机和手扶杆之间采用减震机构连接,利用设置在手扶杆7和架体4之间的减震机构,在压路机工作的过程中减震机构可以有效的减缓架体4震动传导至手扶杆7的次数以及频率,同时为了避免减震机构在转向等操作时影响操控,在所述手扶杆的一端设置有第一插接部17,手扶杆7能够轴向活动,手扶杆7在轴向活动行程具有一操作位置,在所述操作位置,第一插接部17与所述架体上的第二插接部18相插接,第一插接部17与第二插接部18插接后,直接使手扶杆7与架体4连接成一个整体,减震机构将失去工作能力,从而便于工作人员对压路机实施转向。
36.本发明实施例提供的手扶式压路机,手扶杆7具有减震位置和操作位置,在跟车时,手扶杆7通过减震机构得到减震,而当需要操控时,强行压迫手扶杆使的第一插接部17与第二插接部18相插接,如此消除减震机构对操控的负面影响。
37.具体的本实施方式中,减震机构包括固定件以及设置于固定件上的弹簧,固定件可以是板件、杆件或者参考现有技术中其它的减震机构中弹簧的固定基础,由于本技术中减震机构不仅需要减震还需要适配手扶杆7的活动,如此提供两种方式以使得手扶杆能够在减震位置和操作位置间进行切换,其一,固定件滑动连接在手扶杆7上,如手扶杆7上设置有一个轴向的滑槽,固定件滑动连接在该滑槽中,同时弹簧的另一端固接在架体4上,在减震位置,架体的振动通过弹簧、固定件传导到手扶杆7上,如此实现减振,当需要操作时,轴向移动手扶杆7,此时由于固定件与手扶杆7相滑动连接,手扶杆7移动而固定件不动,手扶杆7通过第一插接部17与第二插接部18的插接配合直接固接到架体上,减震机构失去效果,手扶杆7能够操纵架体;其二,固定件滑动连接在架体4上,弹簧的另一端连接在手扶杆7上,如此设置与第一个方案的不同之处在于,当手扶杆7滑动时,整个减震机构跟随滑动,固定件跟随手扶杆7相对架体发生滑动,如此也可以实现减震位置和操作位置间的切换。
38.本实施例中,由于第一插接部17与第二插接部18需要对振动过程进行插接,优选地,两者的插接部分设置有导向机构,如喇叭口结构进行导向。
39.本发明提供的另一个实施例中,优选的,减震机构可设置3至5组,优选为4组,所述减震机构包括方形管11(上述的固定件),固定套筒7.2、活动套杆7.4、以及第一弹簧7.1和第二弹簧7.3,所述活动套杆7.4活动连接在固定套筒7.2的内部,在压路机将震动传导至减震机构时,受到震动时的活动套杆在固定套筒的内部进行往复位移,第一弹簧7.1设置在固定套筒7.2的内部,第二弹簧7.3设置在活动套杆7.2的外部,在震动时活动套杆的往复位移会直接压缩固定套筒内的第一弹簧7.1和活动套杆外部的第二弹簧7.3,活动套杆7.4在固定套筒7.2的内部在弹簧的压缩和复位的过程中实现减震。
40.本实施例中,所述活动套杆7.4的一端连接在手扶杆7上,固定套筒7.2的一端连接在方形管11连接,通过活动套杆7.4和固定套筒7.2将手扶杆7和方形管11连接起来,在压路机工作时手扶杆7在方形管11的内部进行上下短距离活动实现减震。
41.本发明提供的再一个实施例中,优选的,活动机构包括并列设置的两个限位块10,限位块10优选为板状结构,两个限位块10之间形成一个活动空间,限位块10上设置有滑动槽13,两个限位块10上的两个滑动槽13相对设置,方形管11滑动于活动空间中,方形管11上设置有两个固定轴12,两个固定轴12与两个限位槽13一一对应的滑动连接,如此方形管11实现与限位块10的转动兼滑动连接,也即固定轴12能够在限位槽内滑动,同时在任意位置,其同时可以转动。
42.本实施例中,方形套管11能够通过固定轴12在滑动槽13内部的活动而进行位移,方形套管11通过减震机构与手扶杆7连接,如此手扶杆7可以以固定轴12为支点进行转动,调整操作过程中手扶杆7的倾斜角度,同时在固定轴12受到手扶杆给的作用力后在滑动槽13的内部位移,使手扶杆7的一端靠近架体4本体,致使手扶杆7一端的第一插接部17与所述架体上的第二插接部18相插接,第一插接部17与第二插接部18插接后,直接使手扶杆7与架体4连接成一个整体,手扶杆7插接时轴向运动,其同时通过活动套杆7.4和固定套筒7.2带动手扶杆11运动,手扶杆11通过固定轴12在滑动槽13中运动,也就是说7之所以能够轴向运动,是因为固定轴12在滑动槽13内的运动配合,让减振机构整体可以跟着手扶杆7的位移而位移。
43.本发明提供的再一个实施例中,如图5和图6所示,进一步的,为了防止在压路机工作的过程中固定轴在震动时位移,迫使手扶杆7和架体4结合,在所述滑动槽13的上方活动设置有贯穿限位块10的连接杆5,连接杆5的一端设置有绞盘14,绞盘14用于带动连接杆5的转动,所述连接杆5的外部设置有齿轮盘15,绞盘14带动连接杆5转动,连接杆5的转动带动齿轮盘15转动,绞盘14与连接杆5之间采用扭簧连接,此为现有技术,在绞盘14收到外力进行转动时压缩扭簧,并带动连接杆5转动,当失去外力的作用时扭簧复位,带动绞盘14和齿轮盘15复位。
44.本实施例中,所述限位块10上预制有空腔,所述空腔的内部活动设置有带齿槽的挡块16,挡块16在空腔的内部可以进行活动,挡块16的上部分设置有啮合齿,所述齿轮盘15与挡块16啮合,在压路机工作时挡块16处于固定轴12的一侧,避免压路机在工作时固定轴12在滑动槽13内部的位移,挡块16的齿槽设置在其中间部位,并未再一侧全部开设齿槽的原因在于避免震动导致固定轴12以及挡块16的磨损,如图6所示的,挡块16在上下通过动力位移时贯穿滑动槽13,使滑动槽13分为两个部分,从而达到限定固定轴的位置,挡块的形状为长方体形,一侧设置有啮合齿。本发明提供的再一个实施例中,为了方便对挡块16的操
控,在所述手扶杆7的一侧设置有摇把8,摇把8为现有技术常见的一种,因此不做详细赘述,绞盘14和摇把之间采用钢丝连接,即一端缠绕在绞盘14的外部,另一端缠绕在摇把的外部,转动摇把8时钢丝带动绞盘14转动,绞盘14转动时压缩绞盘14与连接杆5之间的扭簧,连接杆5的形状为圆柱体形,在压缩扭簧时齿轮盘15转动提升挡块16,此时挡块16位于空腔的上部,滑动槽13无任何阻碍,连接杆5可以自由滑动,以解除对固定轴12的阻挡,使其可以滑动到滑动槽13的另一端,在通过松开摇把8,挡块16在扭簧的作用下带动连接杆5以及齿轮盘15转动复位,此时挡块16在作用力下复位,进行向下移动,贯穿滑动槽13的上下两侧,同时使连接杆5固定在滑动槽13的另一端,用以第一插接部17与第二插接部18插接后固定手扶杆7的位置,所述齿轮盘15位于限位块10的预制空腔内,所述挡块16在限位块10的预制空腔内运动方式为上下移动,扭簧带动连接杆5用以提升或者复位挡块16。
45.本发明提供的再一个实施例,如图8和10所示的还包括清洁机构,所述清洁机构位于两个辊筒3之间,所述清洁机构包括储存箱19以及提升筒29,储存箱19用于储存辊筒3清理下的附着物,且储存箱19为开口式设计,如图9所示的储存箱19为倒四棱台形状,储存箱19的开口的一侧与靠近手扶杆7一侧的辊筒3贴合,此处的储存箱19可设置成与辊筒3完全贴合状态,完全贴合的情况下,辊筒3顺时针转动会将辊筒3表面的附着物收集进储存箱19,辊筒3逆时针转动附着物会掉落在两个辊筒3之间,均可实现重复碾压,以及实现对辊筒3表面的清洁,所述提升筒29的一端延伸至储存箱19的底部,便于将储存箱19内部的物料进行提升,如图10所示的,提升筒29的内部设置有传动杆23和螺旋叶片24,所述传动杆23与螺旋叶片24连接,螺旋叶片24与提升筒29的内壁贴合,贴合的好处是能够尽可能的将物料提升,防止物料侧漏滑落进储存箱19,所述架体4的顶部设置有驱动马达22,驱动马达22位于架体4一侧中间的位置,所述驱动马达22输出轴的一端与传动杆23连接,为传动杆23提供动力输出,传动杆23转动带动螺旋叶片24转动,将物料进行提升,输送至所述架体4的下方输送带26的上方,输送带26的一端设置有皮带轮25,所述输送带26置于远离手扶杆7的辊筒的上方皮带轮25用于带动输送带26进行活动,此为现有技术,本技术不做过多赘述,输送带26与提升筒29的出口段的相对角度为45
°
,提升筒29的出口段位于输送带26的上方,用于将物料精确输送至输送带26,所述架体4的下方设置有带有转动杆28的连接架27,所述皮带轮25位于其中一个转动杆28的一端,架体4的上方设置有发动机1,发动机为柴油发动机,发动机1连接有传动组件,如图9所示的,发动机1的输出轴的一端通过花键连接有主动轮20,传动组件的一端设置有从动轮21,所述皮带轮25与从动轮21通过皮带连接,利用发动机本身的动力输出使主动轮20通过皮带带动从动轮21转动,从动轮21带动转动杆28转动,转动杆28带动输送带26转动,现有技术不再详细赘述,从而将被提升的物料输送至辊筒3的前方,实现清洁之后,将清洁的物料输送至辊筒3的前方进行重复碾压。
46.以上只通过说明的方式描述了本发明的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本发明的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本发明权利要求保护范围的限制。