1.本实用新型涉及轨道交通中道砟清理领域,具体涉及一种道砟清扫机。
背景技术:
2.清扫作业是轨道交通运行维护中的重要工作。随着轨道交通工务系统机械化生产步伐的不断加快,工务站段普遍拥有了工程捣固车,捣固车在有砟轨道线路大、中维修作业后,捣固头会连带起一定量的石砟到枕面上,道床内也会有多余道砟,若不及时进行清扫枕面及道床内多余的石砟,会对线路开通后的列车运行安全带来很大的安全隐患。目前,清理这些道砟大多是靠人工,该项工作劳动强度大,且随着社会的发展,劳动力成本高,此外,人工清扫耗费时间较长且清扫效果也不理想,且随着经济的发展,列车通过密度较大,施工人员安全也难以保证,而目前市面上的轨道交通道砟清扫装置,大多是利用轨道交通轨行机械作载体的大型清扫机械,体积大、较为笨重,机构负载,不便于小型施工作业,少数能独立作业的道砟清扫装置由于重量限制,上下道困难。
技术实现要素:
3.本实用新型的目的就是为了克服上述现有技术中的不足之处,提供一种道砟清扫机,可进行连续轨枕面清扫及填镐窝作业;清扫机能分体搬运上下道后进行快速组装,上、下道方便;安全、可靠、自动化程度高,提高了工作效率及作业质量,降低了施工成本。
4.为实现上述目的,本实用新型采用如下技术方案:一种道砟清扫机,包括扒砟模块、扫砟模块、动力模块、自走行模块,所述扒砟模块、扫砟模块、自走行模块均与动力模块可拆卸地连接。
5.在上述技术方案中,所述扒砟模块与动力模块通过连杆组件连接。
6.在上述技术方案中,所述连杆组件上放置有运料板,连杆组件上设置有限位块,防止运料板前后窜动。
7.在上述技术方案中,所述扒砟模块包括扒砟底架、扒砟滚刷组件、扒砟外罩及扒砟压杆,所述扒砟滚刷组件通过搭扣与扒砟底架连接,扒砟外罩放置于扒砟底架上,扒砟压杆压住扒砟外罩外侧支架后通过搭扣与扒砟底架连接。
8.在上述技术方案中,所述扒砟滚刷组件有两个,包括扒砟滚刷、扒砟马达,所述扒砟马达接收动力包组件的输出后,可带动扒砟滚刷做旋转运动,两个扒砟滚刷组件对称布置于扒砟底架上,可实现两两相对旋转,扒砟方向为由轨道中心向轨道两侧。
9.在上述技术方案中,所述扒砟底架上布有可调节高度的从动轮组件一,以调节扒砟滚刷到枕盒的高度。
10.在上述技术方案中,所述扫砟模块包括扫砟支架、扫砟滚刷组件、扫砟外罩及扫砟压杆,所述扫砟滚刷组件、扫砟外罩通过搭扣与扫砟支架连接,所述扫砟外罩放置于扫砟支架上,扫砟压杆压住扫砟外罩外侧支架后通过搭扣与扫砟支架连接。
11.在上述技术方案中,所述扫砟滚刷组件包括扫砟滚刷、扫砟马达,所述扫砟马达接
收动力包组件的输出后,可带动扫砟滚刷做旋转运动,从而实现枕面清扫功能。
12.在上述技术方案中,所述扫砟支架上布有可调节高度的从动轮组件二,以调节扫砟滚刷到枕面的高度。
13.在上述技术方案中,所述动力模块包括动力支架、动力包组件,动力支架通过连接杆组件与扫砟支架销接;动力支架两侧设置有螺杆组件及滑动卡板,滑动卡板安装于动力支架上,当螺杆组件转动时,可控制滑动卡板上下移动,从而调节动力模块到枕面的高度。
14.在上述技术方案中,所述动力包组件包括齿轮泵模块、汽油机模块与档杆组件,齿轮泵模块、汽油机模块间通过分离式联轴器实现动力传输,准备作业时,将汽油机模块沿着齿轮泵模块上的滑槽由外向内推,使两模块上的半节联轴器对插到位后,将档杆组件放置于汽油机模块支架外侧,并用搭扣与汽油机模块支架连接固定,作业完成后取下档杆组件,使齿轮泵模块、汽油机模块分离。
15.在上述技术方案中,所述自走行模块包括主动轮组件、主动轮马达,所述自走行模块通过主动轮轴承座组件与动力支架连接,从而带动其余模块一起沿轨道方向运动,所述主动轮马达接收动力包组件的输出后,可驱动主动轮组件转动,从而实现道砟清扫机在钢轨上的自走行。
16.本实用新型主要包括以下几个功能模块,以实现机器清砟代替人工清砟:
17.1.设置有自走行模块,使智能清扫机能在轨道上自走行进行独立作业;
18.2.设置有扫砟模块,使智能清扫机能有效清除枕面道砟;
19.3 .设置有扒砟模块,使智能清扫机能填补捣固机镐头作业形成的窝;
20.4.设置有动力模块,提供自走行模块、扫砟模块、扒砟模块作业所需的动力;
21.5.以上各模块均设计为分体式结构,且各模块之间通过连杆、插销、搭扣等连接,减轻单模块重量,使清扫机能分体由人工搬运上下道后进行快速组装,方便机器上下道;
22.本装置通过上述功能性模块可进行连续轨枕面清扫及填镐窝作业;上下道方便;安全、可靠、自动化程度高,提高了工作效率及作业质量,降低了施工成本。
附图说明
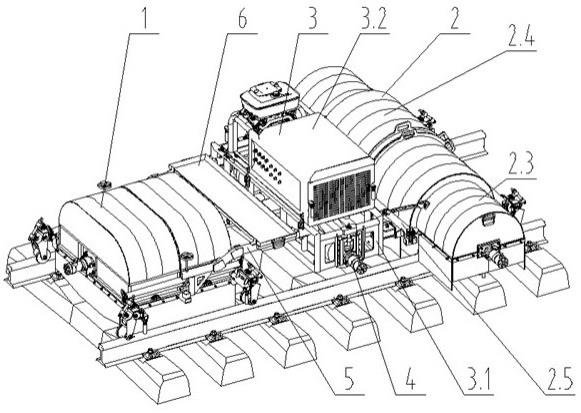
23.图1为实施例2道砟清扫机的结构示意图。
24.图2为实施例2中扒砟模块的结构示意图。
25.图3为扒砟模块内部结构示意图。
26.图4为扒砟滚刷组件的结构示意图。
27.图5为实施例2中扫砟模块、动力模块的局部结构示意图。
28.图6为扫砟滚刷组件的结构示意图。
29.图7为实施例2中动力包组件的内部结构示意图。
30.图8为从动轮组件一的结构示意图。
31.图9为连杆组件的结构示意图。
具体实施方式
32.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分
理解本实用新型。但是本实用新型能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施的限制。
33.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同吋存在居中元件。
34.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/ 或”包括一个或多个相关的所列项目的任意的和所有的组合。
35.实施例1
36.本实施例提供一种道砟清扫机,包括扒砟模块、扫砟模块、动力模块、自走行模块,所述扒砟模块、扫砟模块、自走行模块均与动力模块之间通过连杆、插销、搭扣等实现可拆卸地连接。
37.在上述实施例中,所述扒砟模块与动力模块通过连杆组件连接。所述连杆组件上放置有运料板,连杆组件上设置有限位块,防止运料板前后窜动。
38.在上述实施例中,所述扒砟模块可快速拆分为扒砟底架、扒砟滚刷组件、扒砟外罩及扒砟压杆;所述扫砟模块可快速拆分为扫砟支架、扫砟滚刷组件、扫砟外罩及两个扫砟压杆;所述动力模块可快速拆分为动力支架、动力包组件;而扒砟模块、扫砟模块、动力模块、自走行模块、连杆组件、运料板之间也均可快速拆卸,以减少单体组件的重量,从而实现清扫机的快速上下道。
39.实施例2
40.如图1所示,本实施例提供一种道砟清扫机,包括扒砟模块1、扫砟模块2、动力模块3、自走行模块4、两个连杆组件5、运料板6。
41.如图2所示,所述扒砟模块1包括一个扒砟底架1.1、两个扒砟滚刷组件1.2、两个扒砟外罩1.3及两个扒砟压杆1.4,所述扒砟滚刷组件1.2通过搭扣与扒砟底架1.1连接,两个扒砟外罩1.3对称放置于扒砟底架1.1上,两个扒砟压杆1.4压住两个扒砟外罩1.3外侧支架后通过搭扣与扒砟底架1.1连接。如图4所示,所述扒砟滚刷组件1.2包括扒砟滚刷1.2.1、安装于扒砟滚刷1.2.1一端的扒砟轴承座组件1.2.2、栓接于扒砟轴承座组件1.2.2上的扒砟马达1.2.3及安装于扒砟滚刷1.2.1另一端的扒砟轴承1.2.4;所述扒砟马达1.2.3接收动力包组件3.2的输出后,可带动扒砟滚刷1.2.1做旋转运动,由于两个扒砟滚刷组件1.2对称布置于扒砟底架1.1上,所以两个扒砟滚刷1.2.1可实现两两相对旋转,扒砟方向为由轨道中心向轨道两侧,实现“扒镐窝”的功能。如图3所示,所述扒砟底架1.1上布有四个可调节高度的从动轮组件一1.1.1,以调节扒砟滚刷1.2.1到枕盒的高度,所述扒砟底架1.1上布有用于阻挡石砟飞出及隔音的橡胶板组一1.1.2;所述扒砟底架1.1上布有翻盖式轴承座组1.1.3,卡住扒砟轴承座组件1.2.2及扒砟轴承1.2.4后,扒砟滚刷1.2.1可绕其旋转,翻盖式轴承座组1.1.3通过搭扣开合,可快速装卸。
42.如图5所示,所述扫砟模块2包括扫砟支架2.1、扫砟滚刷组件2.2、扫砟外罩一2.3、扫砟外罩二2.4及两个扫砟压杆2.5,所述扫砟滚刷组件2.2、扫砟外罩一2.3以及扫砟外罩
二2.4通过搭扣与扫砟支架2.1连接,扫砟外罩一2.3以及扫砟外罩二2.4一左一右放置于扫砟支架2.1上,两个扫砟压杆2.5压住扫砟外罩一2.3以及扫砟外罩二2.4外侧支架后通过搭扣与扫砟支架2.1连接。如图6所示,所述扫砟滚刷组件2.2包括扫砟滚刷2.2.1、安装于扫砟滚刷2.2.1一端的扫砟轴承座组件2.2.2、栓接于扫砟轴承座组件2.2.2上的扫砟马达2.2.3及两个对称分布的扫砟轴承2.2.4;所述扫砟马达2.2.3接收动力包组件3.2的输出后,可带动扫砟滚刷2.2.1做旋转运动,从而实现枕面清扫功能。所述扫砟支架2.1上布有两个可调节高度的从动轮组件二2.1.1,以调节扫砟滚刷2.2.1到枕面的高度,所述扫砟支架2.1上布有用于阻挡石砟飞出及隔音的橡胶板组二2.1.2,所述扫砟支架2.1上对称布有两个翻盖式轴承座2.1.3,卡住两个扫砟轴承2.2.4后,扫砟滚刷2.2.1可绕其旋转,翻盖式轴承座2.1.3通过搭扣开合,可快速装卸。
43.如图1、图5所示,所述动力模块3包括动力支架3.1、动力包组件3.2,所述动力包组件3.2放置于动力支架3.1的滑槽内,并用搭扣锁紧,动力支架3.1后方设置有连接杆组件3.1.1,动力支架3.1通过连接杆组件3.1.1与扫砟支架2.1销接;动力支架3.1两侧设置有螺杆组件3.1.2,及滑动卡板3.1.3,螺杆组件3.1.2上端固定于动力支架3.1上,且可原位转动,螺杆组件3.1.2下端安装于滑动卡板3.1.3螺纹孔内,滑动卡板3.1.3安装于动力支架3.1上卡槽内,且而滑动卡板3.1.3卡住主动轮轴承座组件4.2,当螺杆组件3.1.2转动时,可控制滑动卡板3.1.3上下移动,从而调节动力模块3到枕面的高度。如图7所示,所述动力包组件3.2包括齿轮泵模块3.2.1、汽油机模块3.2.2与档杆组件3.2.3,齿轮泵模块3.2.1、汽油机模块3.2.2间通过分离式联轴器实现动力传输,准备作业时,将汽油机模块3.2.2沿着齿轮泵模块3.2.1上的滑槽有外向内推,使两模块上的半节联轴器对插到位后,将档杆组件3.2.3放置于汽油机模块3.2.2支架外侧,并用搭扣与汽油机模块3.2.2支架连接固定,作业完成后取下档杆组件3.2.3,使齿轮泵模块3.2.1、汽油机模块3.2.2分离,从而减轻单模块重量,便于搬运。
44.所述自走行模块4包括主动轮组件4.1、安装于主动轮组件4.1两端的主动轮轴承座组件4.2及栓接于主动轮轴承座组件4.2上的主动轮马达4.3,所述自走行模块4通过主动轮轴承座组件4.2沿高度方向卡在滑动卡板3.1.3内,从而带动其余模块一起沿轨道方向运动,所述主动轮马达4.3接收动力包组件3.2的输出后,可驱动主动轮组件4.1转动,从而实现道砟清扫机在钢轨上的自走行。
45.如图9所示,所述连杆组件5包括连杆5.1及压杆组件5.2,压杆组件5.2与连杆5.1为螺纹连接,可调节相对高度,连杆5.1一端插入动力支架3.1上的连接管内并用销轴固定,另一端抵住扒砟底架1.1提供推力,压杆组件5.2末端压块由上而下放入扒砟底架1.1上的安装座内,并调节压杆组件5.2与连杆5.1的高度使连杆组件5对扒砟模块1产生向下的压紧力,减少扒砟模块1作业时的跳动,连杆组件5一左一右对称布置。
46.所述运料板6直接放置于两个连杆组件5上,连杆5.1上设置有两个限位块,防止运料板6前后窜动。
47.如图8所示,所述从动轮组件一1.1.1包括安装座1.1.1.1、转动座1.1.1.2、铰接轴一1.1.1.3、转动头一1.1.1.4、铰接轴二1.1.1.5、转动头二1.1.1.6、铰接轴三1.1.1.7、调节螺杆1.1.1.8、锁定螺母一1.1.1.9、锁定螺母二1.1.1.10、滚轮组件1.1.1.11、滚轮轴1.1.1.12、锁紧螺母1.1.1.13,所述安装座1.1.1.1栓接于扒砟底架1.1上,所述转动座
1.1.1.2通过铰接轴一1.1.1.3与安装座1.1.1.1铰接,所述转动头一1.1.1.4通过铰接轴二1.1.1.5与安装座1.1.1.1铰接,所述转动头二1.1.1.6通过铰接轴三1.1.1.7与转动座1.1.1.2铰接,所述滚轮轴1.1.1.12穿过滚轮组件1.1.1.11及转动座1.1.1.2两侧板上的圆孔,两端用锁紧螺母1.1.1.13锁定,所述调节螺杆1.1.1.8穿过转动头一1.1.1.4及转动头二1.1.1.6,用锁定螺母二1.1.1.10锁定,调节螺杆1.1.1.8阶梯面顶到转动头二1.1.1.6上平面,转动头二1.1.1.6内孔为光孔,调节螺杆1.1.1.8可相对于其转动而不发生轴向位移,转动头一1.1.1.4内孔为螺纹孔,当调节螺杆1.1.1.8旋转时,转动头一1.1.1.4沿着螺杆上下移动,转动头一1.1.1.4与转动头二1.1.1.6距离改变,从而带动转动座1.1.1.2沿着绕着铰接轴一1.1.1.3转动达到调节滚轮组件1.1.1.11高度的目的,锁定螺母一1.1.1.9穿过调节螺杆1.1.1.8安装于转动头一1.1.1.4上平面,用于锁紧调节螺杆1.1.1.8,防止其自转,所述从动轮组件二2.1.1结构同从动轮组件一1.1.1。
48.通过从动轮组件一1.1.1、从动轮组件二2.1.1及螺杆组件3.1.2的高度调节可使清扫机适应不同型号的枕木及钢轨。
49.所述橡胶板组一1.1.2、橡胶板组二2.1.2可以阻挡清扫机作业时石砟飞出及隔音,提升了清扫机的安全性能。
50.所述扒砟马达1.2.3、扫砟马达2.2.3、主动轮马达4.3通过液压胶管与动力包组件3.2实现动力连通,液压胶管与各马达上装的是快速接头,可快速拆装。
51.本实用新型清扫机的工作流程:
52.1.将清扫机各模块从指定地点人工搬运上道;
53.2.将各模块进行快速组装,连接好各液压管路;
54.3. 调节从动轮组件一1.1.1、从动轮组件二2.1.1及螺杆组件3.1.2的高度使扒砟滚刷1.2.2到枕盒至合适距离,扫砟滚刷2.2.1到枕面至合适距离,往运料板6上放置适量配重;
55.4.启动动力包组件3.2,通过动力包组件3.2上的控制面板或者无线遥控器控制各模块的动作,扒砟马达1.2.4接收动力包组件3.2的输出后,带动扒砟滚刷1.2.2做旋转运动;扫砟马达2.2.3接收动力包组件3.2的输出后,带动扫砟滚刷2.2.1做旋转运动,主动轮马达4.3接收动力包组件3.2的输出后,驱动主动轮组件4.1转动,从而带动清扫机进行连续的“扒镐窝”及枕面清扫作业;
56.5.作业完成后,将各模块进行快速拆卸,将清扫机各模块从指定地点人工搬运下道。
57.本说明书未作详细描述的内容属于本领域专业技术人员公知的现有技术。
58.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型实施例技术方案的范围。