一种用于智能制造流水线的气动夹爪装置
【技术领域】
1.本实用新型涉及一种智能制造流水线的组成装置,具体涉及一种用于智能制造流水线的气动夹爪装置,属于工业自动化装备技术领域。
背景技术:
2.智能制造流水线是一种在工业生产中广泛采用自动控制、自动调整装置,用以代替人工操纵机器进行加工生产的系统,其能提高生产过程的安全性,提高生产效率和产品质量,减少生产过程的原材料、能源损耗。
3.夹爪装置是智能制造流水线的重要组成部分。其安装于机械手臂的末端,用于抓取工件,并将工件转送至其他设备上。然而,现有技术的夹爪装置在抓取工件时的抓取位置不易调整;将工件放到设备上时位置也不容易定位,从而影响后续的加工精度。
4.因此,为解决上述技术问题,确有必要提供一种创新的用于智能制造流水线的气动夹爪装置,以克服现有技术中的所述缺陷。
技术实现要素:
5.为解决上述问题,本实用新型的目的在于提供一种结构简单,使用方便,且定位精确的用于智能制造流水线的气动夹爪装置。
6.为实现上述目的,本实用新型采取的技术方案为:一种用于智能制造流水线的气动夹爪装置,其用于夹持工件,其包括夹爪连接座、气缸连接板、三爪气动手指气缸、阶梯夹爪、工件弹性垫以及弹簧柱塞;其中,所述气缸连接板安装于夹爪连接座的两侧;所述三爪气动手指气缸安装于气缸连接板上;所述阶梯夹爪安装于三爪气动手指气缸上,并由三爪气动手指气缸驱动而夹紧或释放工件;所述工件弹性垫通过辅助连接块、螺栓弹簧与三爪气动手指气缸连接;所述弹簧柱塞安装于阶梯夹爪上,其能抵接在工件上。
7.本实用新型的用于智能制造流水线的气动夹爪装置进一步设置为:所述阶梯夹爪上包括夹紧垫块,所述夹紧垫块通过螺栓和阶梯夹爪固定;所述弹簧柱塞安装于夹紧垫块上。
8.本实用新型的用于智能制造流水线的气动夹爪装置进一步设置为:所述工件弹性垫呈y型,其位于阶梯夹爪之间。
9.本实用新型的用于智能制造流水线的气动夹爪装置进一步设置为:所述辅助连接块一端固定于三爪气动手指气缸上;所述螺栓弹簧一端连接于辅助连接块,另一端连接工件弹性垫,使工件弹性垫能弹性抵顶工件。
10.本实用新型的用于智能制造流水线的气动夹爪装置还设置为:所述阶梯夹爪离中心轴线的距离为78
±
8mm,以及45
±
8mm。
11.与现有技术相比,本实用新型具有如下有益效果:
12.1.本实用新型的用于智能制造流水线的气动夹爪装置通过螺栓弹簧与三爪气动手指气缸连接,能够使夹爪在放置工件到设备上时,夹爪松开工件的情况下通过工件弹性
垫顶住工件,使得工件能安放到设备的位置更准确。
13.2.本实用新型的用于智能制造流水线的气动夹爪装置通过弹簧柱塞,能够使夹爪在夹紧工件时通过弹簧柱塞顶住工件的一个平面,从而使工件在抓取时的位置更加精准。
14.3.本实用新型的用于智能制造流水线的气动夹爪装置能够对多个尺寸的工件进行抓取,实现一个夹爪多个工件使用的功能。
【附图说明】
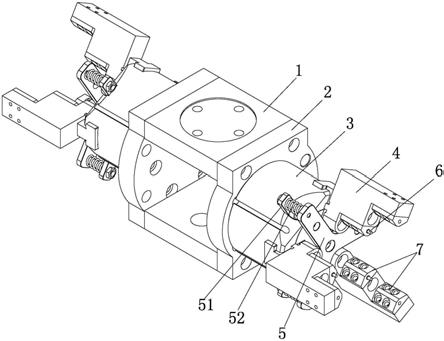
15.图1是本实用新型的用于智能制造流水线的气动夹爪装置的立体图。
16.图2是图1的主视图。
17.图3是图1的侧视图。
【具体实施方式】
18.请参阅说明书附图1至附图3所示,本实用新型为一种用于智能制造流水线的气动夹爪装置,其用于夹持工件,其由夹爪连接座1、气缸连接板2、三爪气动手指气缸3、阶梯夹爪4、工件弹性垫5以及弹簧柱塞6等几部分装配而成。
19.其中,所述夹爪连接座1用于将整个气动夹爪装置安装于机械手臂上。所述气缸连接板2安装于夹爪连接座1的两侧。
20.所述三爪气动手指气缸3安装于气缸连接板2上。所述阶梯夹爪4安装于三爪气动手指气缸3上,并由三爪气动手指气缸3驱动来伸缩阶梯夹爪4而夹紧或释放工件。
21.在本实施方式中,所述阶梯夹爪4离中心轴线的距离为78
±
8mm,以及45
±
8mm,从而可实现86-70,以及53-37这两个范围内的多个尺寸的工件进行抓取,实现一个夹爪多个工件使用的功能。
22.所述工件弹性垫5通过辅助连接块51、螺栓弹簧52与三爪气动手指气缸3连接。具体的说,所述工件弹性垫5呈y型,其位于阶梯夹爪4之间。所述辅助连接块51一端固定于三爪气动手指气缸3上;所述螺栓弹簧52一端连接于辅助连接块51,另一端连接工件弹性垫5,使工件弹性垫5能弹性抵顶工件。当夹爪装置在放置工件到设备上时,阶梯夹爪4松开工件的情况下通过工件弹性垫5顶住工件,使得工件能安放到设备的位置更准确。
23.所述弹簧柱塞6安装于阶梯夹爪4上,其能抵接在工件上。具体的说,所述阶梯夹爪4上包括夹紧垫块7,所述夹紧垫块7通过螺栓和阶梯夹爪4固定,因工件不同需更换不同材质不同尺寸使,方便更换夹紧垫块。
24.进一步的,所述弹簧柱塞6安装于夹紧垫块7上。当夹爪4在夹紧工件时,通过弹簧柱塞6顶住工件的一个平面,从而使工件在抓取时的位置更加精准。
25.以上的具体实施方式仅为本创作的较佳实施例,并不用以限制本创作,凡在本创作的精神及原则之内所做的任何修改、等同替换、改进等,均应包含在本创作的保护范围之内。
技术特征:
1.一种用于智能制造流水线的气动夹爪装置,其用于夹持工件,其特征在于:包括夹爪连接座、气缸连接板、三爪气动手指气缸、阶梯夹爪、工件弹性垫以及弹簧柱塞;其中,所述气缸连接板安装于夹爪连接座的两侧;所述三爪气动手指气缸安装于气缸连接板上;所述阶梯夹爪安装于三爪气动手指气缸上,并由三爪气动手指气缸驱动而夹紧或释放工件;所述工件弹性垫通过辅助连接块、螺栓弹簧与三爪气动手指气缸连接;所述弹簧柱塞安装于阶梯夹爪上,其能抵接在工件上。2.如权利要求1所述的用于智能制造流水线的气动夹爪装置,其特征在于:所述阶梯夹爪上包括夹紧垫块,所述夹紧垫块通过螺栓和阶梯夹爪固定;所述弹簧柱塞安装于夹紧垫块上。3.如权利要求1所述的用于智能制造流水线的气动夹爪装置,其特征在于:所述工件弹性垫呈y型,其位于阶梯夹爪之间。4.如权利要求3所述的用于智能制造流水线的气动夹爪装置,其特征在于:所述辅助连接块一端固定于三爪气动手指气缸上;所述螺栓弹簧一端连接于辅助连接块,另一端连接工件弹性垫,使工件弹性垫能弹性抵顶工件。5.如权利要求1所述的用于智能制造流水线的气动夹爪装置,其特征在于:所述阶梯夹爪离中心轴线的距离为78
±
8mm,以及45
±
8mm。
技术总结
本实用新型涉及一种用于智能制造流水线的气动夹爪装置,其用于夹持工件,其包括夹爪连接座、气缸连接板、三爪气动手指气缸、阶梯夹爪、工件弹性垫以及弹簧柱塞;其中,所述气缸连接板安装于夹爪连接座的两侧;所述三爪气动手指气缸安装于气缸连接板上;所述阶梯夹爪安装于三爪气动手指气缸上,并由三爪气动手指气缸驱动而夹紧或释放工件;所述工件弹性垫通过辅助连接块、螺栓弹簧与三爪气动手指气缸连接;所述弹簧柱塞安装于阶梯夹爪上,其能抵接在工件上。本实用新型的用于智能制造流水线的气动夹爪装置具有结构简单,使用方便,且定位精确等诸多优点。等诸多优点。等诸多优点。
技术研发人员:谢翔宇 金春星 谢岳庆
受保护的技术使用者:浙江中科仪器有限公司
技术研发日:2021.06.25
技术公布日:2022/1/28