1.本发明属于建筑板材安装设备,具体是一种自适应板材安装机器人。
背景技术:
2.目前,由于室内的安装环境受到一定的空间限制,室内的板材用传统的方法来安装极其困难,费时费力的同时又极易对安装人员造成伤害。在安装大重量的板材时,人工安装难以保证其安装精度,安装过程极为繁琐,因此为提高建筑自动化水平,研究者们对建筑机器人进行了研发,尤其在高层建筑清洁、喷涂等方面取得了较大的成就,而在板材安装领域仍处于起步阶段,取得的进展较为缓慢。
3.申请号为202011419295.8的文献公开了一种高层建筑外墙施工用智能建筑机器人,该机械结构包括机器人座体、作业单元以及升降组件,此机械装置主要适用于高空、中低载的安装件,并不适用于室内及大载荷的板材安装。
技术实现要素:
4.针对现有技术的不足,本发明拟解决的技术问题是,提供一种自适应板材安装机器人。
5.本发明解决所述技术问题的技术方案是,提供一种自适应板材安装机器人,其特征在于,该机器人包括移动底座、升降装置、机械臂和末端执行器;
6.移动底座用于带动机器人实现任意方向的移动,升降装置设置于移动底座上,用于实现机械臂的高度方向上的升降;
7.所述包括机械臂内连杆、机械臂外连杆、伸缩执行元件一、伸缩执行元件二、俯仰连杆一、俯仰连杆二、伸缩执行元件三、机械臂连接件一、连接件一支撑轴、伸缩执行元件一连接件、机械臂连接件二、机械臂支架、伸缩执行元件三连接件和机械臂连接件三;
8.机械臂连接件二的一端与升降装置的升降台的架体上端固定连接,另一端与机械臂外连杆的一端铰接;伸缩执行元件一的壳体铰接于升降装置的升降台的架体下端,输出端通过伸缩执行元件一连接件与机械臂外连杆的中部铰接;机械臂內连杆嵌套于机械臂外连杆的内侧,与机械臂外连杆间隙配合,能够沿机械臂外连杆滑动;机械臂支架固定在机械臂內连杆上;伸缩执行元件二的壳体固定于机械臂支架上,输出端分别与俯仰连杆一和俯仰连杆二的一端铰接;俯仰连杆二的另一端通过俯仰连杆销轴铰接于机械臂支架的中部;俯仰连杆一的另一端与机械臂连接件三铰接;连接件一支撑轴铰接于机械臂支架的端部;连接件一支撑轴的两端分别固定连接有机械臂连接件一;伸缩执行元件三的壳体固定于机械臂外连杆上,输出端与伸缩执行元件三连接件固定连接;伸缩执行元件三连接件与机械臂支架固定连接;
9.所述末端执行器包括吸盘架体、吸盘、水平旋转电机、竖直旋转电机、平移电机、同步带、滚珠丝杠支撑座一、滚珠丝杠、滚珠丝杠支撑座二、平移支架、平移滑块、水平旋转电机支架、竖直旋转电机支架和竖直旋转连接件;
10.平移支架与吸盘架体固定连接;滚珠丝杠支撑座一和滚珠丝杠支撑座二固定在平移支架的两端;滚珠丝杠的两端分别转动安装于滚珠丝杠支撑座一和滚珠丝杠支撑座二中;平移滑块转动安装于滚珠丝杠上;竖直旋转连接件固定于平移滑块上;平移电机的壳体固定于平移支架或吸盘架体上,输出端固定有同步带轮;滚珠丝杠的输入端固定有同步带轮;两个同步带轮通过同步带连接;竖直旋转电机的壳体固定于竖直旋转电机支架上,输出端与竖直旋转连接件固定连接;水平旋转电机的壳体固定于水平旋转电机支架上,输出端与竖直旋转电机支架固定连接;吸盘设置于吸盘架体上;水平旋转电机支架的上下端分别与机械臂连接件一和机械臂连接件三固定连接。
11.与现有技术相比,本发明有益效果在于:
12.(1)本发明通过各部件的协同运动,可以满足不同方位、角度和高度的各种室内环境的安装作业,同时本发明具有七自由度,机器人自由度冗余的性能应用范围更加广泛。
13.(2)本发明安装精度高、承载能力大、体积小、灵活性能好、没有奇异位型位置、结构简单、成本低,大大减少了施工人员的数量,施工作业更加安全,实现了板材安装的机械化,保证施工效率。
14.(3)本发明通过末端执行器在水平和竖直方向上的旋转,调整板材的安装位置,从而减小安装误差,保证安装作业的精度。
15.(4)本发明采用agv作为移动底座,提高了机器人的灵活性,减少了人工对机器人的干预和辅助,在大范围施工作业时有效提高工作效率,降低施工人员的工作强度。
16.(5)升降台采用工字形和双桁架结构,极大提高了工作的稳定性,用于提升板材的安装空间。
附图说明
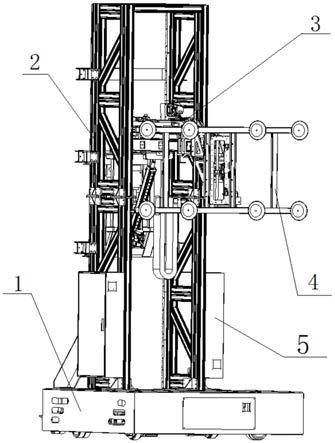
17.图1为本发明的整体结构立体图;
18.图2为本发明的移动底座的立体图;
19.图3为本发明的升降装置的主视图;
20.图4为本发明的升降装置的后视图;
21.图5为本发明的升降台的主视图;
22.图6为本发明的机械臂的立体图;
23.图7为本发明的去掉机械臂支架后的机械臂的立体图;
24.图8为本发明的末端执行器的立体图;
25.图9为本发明的去掉水平旋转电机、竖直旋转电机及其支架的末端执行器的立体图。
26.图中,移动底座1、升降装置2、机械臂3、末端执行器4、机器人控制柜5;
27.车体控制柜101、万向轮102、辅助轮103、辅助轮连接板104、车体105;
28.架体201、连接板一202、连接板二203、升降台204、架体连接件205、齿轮齿条206;
29.吊环204-1、滑块204-2、升降台上支架204-3、升降台齿轮204-4、升降台轴承204-5、升降台输出轴204-6、行星减速机204-7、升降台电机204-8、升降台安装板204-9、升降台主支架204-10、升降台下支架204-11;
30.机械臂内连杆301、机械臂外连杆302、伸缩执行元件一303、伸缩执行元件二304、
俯仰连杆一305、俯仰连杆二306、伸缩执行元件三307、机械臂连接件一308、连接件一支撑轴309、伸缩执行元件一连接件310、机械臂连接件二311、机械臂支架312、俯仰连杆销轴313、伸缩执行元件三连接件314、机械臂连接件三315;
31.吸盘架体401、吸盘402、水平旋转电机403、竖直旋转电机404、平移电机405、同步带406、滚珠丝杠支撑座一407、滚珠丝杠408、滚珠丝杠支撑座二409、平移支架410、平移滑块411、水平旋转电机支架412、竖直旋转电机支架413、竖直旋转连接件414。
具体实施方式
32.下面给出本发明的具体实施例。具体实施例仅用于进一步详细说明本发明,不限制本技术权利要求的保护范围。
33.本发明提供了一种自适应板材安装机器人(简称机器人),其特征在于,该机器人包括移动底座1、升降装置2、机械臂3、末端执行器4和机器人控制柜5;
34.移动底座1用于带动机器人实现任意方向的移动,升降装置2设置于移动底座1上,用于实现机械臂3的高度方向上的升降;
35.所述包括机械臂内连杆301、机械臂外连杆302、伸缩执行元件一303、伸缩执行元件二304、俯仰连杆一305、俯仰连杆二306、伸缩执行元件三307、机械臂连接件一308、连接件一支撑轴309、伸缩执行元件一连接件310、机械臂连接件二311、机械臂支架312、伸缩执行元件三连接件314和机械臂连接件三315;
36.机械臂连接件二311的一端与升降装置2的升降台204的架体上端固定连接,另一端与机械臂外连杆302的一端铰接;伸缩执行元件一303的壳体尾部铰接于升降装置2的升降台204的架体下端,输出端通过伸缩执行元件一连接件310与机械臂外连杆302的中部铰接(即伸缩执行元件一303的输出端与伸缩执行元件一连接件310铰接,伸缩执行元件一连接件310固定于机械臂外连杆302的中部);机械臂內连杆301沿机械臂外连杆302的另一端嵌套于机械臂外连杆302的内侧,与机械臂外连杆302间隙配合,机械臂內连杆301能够沿机械臂外连杆302滑动;机械臂支架312固定在机械臂內连杆301上;伸缩执行元件二304的壳体固定于机械臂支架312上,输出端分别与俯仰连杆一305和俯仰连杆二306的一端铰接;俯仰连杆二306的另一端通过俯仰连杆销轴313铰接于机械臂支架312的中部;俯仰连杆一305的另一端与机械臂连接件三315铰接;连接件一支撑轴309铰接于机械臂支架312的端部;连接件一支撑轴309的两端分别固定连接有机械臂连接件一308;伸缩执行元件三307的壳体固定于机械臂外连杆302上,输出端与伸缩执行元件三连接件314固定连接;伸缩执行元件三连接件314与机械臂支架312固定连接;
37.伸缩执行元件一303伸缩,带动机械臂3以机械臂连接件二311与机械臂外连杆302的铰接点为轴进行俯仰运动(即沿竖直面的转动)。
38.伸缩执行元件三307伸缩,通过伸缩执行元件三连接件314带动机械臂內连杆301沿机械臂外连杆302进行伸缩运动,进而带动机械臂3伸缩。
39.俯仰连杆一305、俯仰连杆二306、机械臂支架312和末端执行器4的水平旋转电机支架412构成四连杆机构;伸缩执行元件二304伸缩,通过俯仰连杆一305、俯仰连杆二306、机械臂支架312和末端执行器4的水平旋转电机支架412构成的四连杆机构,带动与机械臂连接件一308和机械臂连接件三315固定连接的末端执行器4进行俯仰运动(即沿竖直面的
转动)。
40.优选地,所述执行元件采用电缸、液压缸或气缸,优选电缸。
41.优选地,伸缩执行元件一303与竖直方向呈60
°
左右的支撑角度。
42.所述末端执行器4包括吸盘架体401、吸盘402、水平旋转电机403、竖直旋转电机404、平移电机405、同步带406、滚珠丝杠支撑座一407、滚珠丝杠408、滚珠丝杠支撑座二409、平移支架410、平移滑块411、水平旋转电机支架412、竖直旋转电机支架413和竖直旋转连接件414;
43.平移支架410与吸盘架体401固定连接;滚珠丝杠支撑座一407和滚珠丝杠支撑座二409对称固定在平移支架410的两端,位于平移支架410的正中间;滚珠丝杠408的两端分别转动安装于滚珠丝杠支撑座一407和滚珠丝杠支撑座二409中;平移滑块411转动安装于滚珠丝杠408上;竖直旋转连接件414固定于平移滑块411上;平移电机405的壳体固定于平移支架410或吸盘架体401上,输出端固定有同步带轮;滚珠丝杠408的输入端固定有同步带轮;两个同步带轮通过同步带406连接;竖直旋转电机404的壳体固定于竖直旋转电机支架413上,输出端与竖直旋转连接件414过盈配合;水平旋转电机403的壳体固定于水平旋转电机支架412上,输出端与竖直旋转电机支架413过盈配合;吸盘402设置于吸盘架体401上;水平旋转电机支架412的上下端分别与机械臂连接件一308和机械臂连接件三315固定连接。
44.平移电机405转动,通过同步带406高效和平稳的传动,减少传动件的振动,带动滚珠丝杠408转动,使得竖直旋转连接件414沿滚珠丝杠408进行平移运动,共同作用调整吸盘架体401和机械臂3的相对位置关系,对抓取板材的偏移量进行补偿以及对板材位置的微调,从而弥补安装误差,满足精度要求。
45.水平旋转电机403的旋转带动末端执行器4沿水平面转动;水平旋转电机403构成的旋转自由度可以进行90
°
范围内的翻转,对吸盘方向和安装立面不平行度进行补偿以及对板材位置的微调。
46.竖直旋转电机404的旋转带动末端执行器4沿竖直面转动;竖直旋转电机404构成的旋转自由度可以进行360
°
范围内旋转,对吸盘架体401和地轨的不平行度进行补偿以及对板材位置的微调。
47.优选地,吸盘架体401为工字形,稳定性好承载力分布均匀;吸盘402均布于吸盘架体401上。
48.优选地,该机器人还包括机器人控制柜5;机器人控制柜5分别与移动底座1、升降装置2、机械臂3和末端执行器4通讯连接,用于控制移动底座1的移动、升降台204的升降即机械臂3在高度上的移动、机械臂3的旋转和伸缩运动以及末端执行器4的抓取工作。机器人控制柜5对机械臂发送指令使机械臂通过内外连杆的伸缩运动靠近板材,然后抓取板材,将板材抓取后搬运到安装位置,通过升降台和机械臂可以升高到理想的安装高度,使板材靠近安装位置,然后通过旋转电机和平移电机可以在竖直和水平方向上调整角度,提高板材的安装精度,通过六维力传感器可以实时传递手臂末端的力反馈信息以保证板材的可靠安装,达到安装精度。
49.优选地,所述移动底座1采用agv,包括车体控制柜101、万向轮102、辅助轮103、辅助轮连接板104和车体105;升降装置2的架体201固定在车体105上;车体控制柜101设置于车体105内部,用于发送指令控制移动底座1的移动;万向轮102转动安装在车体105的底部,
实现机器人沿地面任意方向的移动;辅助轮103通过辅助轮连接板104转动安装在车体105的底部,用于移动底座1在长距离移动或者转弯时辅助运动,是被动轮。
50.优选地,所述升降装置2包括架体201、升降台204和齿轮齿条206;架体201固定在移动底座1上;升降台204滑动设置于架体201上,能够沿架体201实现高度方向上的升降;齿轮齿条206固定在架体201上,齿轮齿条206与升降台204啮合传动连接,使得升降台204完成高度方向上的升降;机器人控制柜5固定在升降装置2的架体201的底部;
51.优选地,所述升降台204包括滑块204-2、升降台上支架204-3、升降台齿轮204-4、升降台输出轴204-6、升降台电机204-8、升降台安装板204-9、升降台主支架204-10和升降台下支架204-11;
52.升降台上支架204-3和升降台下支架204-11均通过滑块204-2与架体201滑动连接;升降台主支架204-10的两端分别固定在升降台上支架204-3和升降台下支架204-11上,能够增强稳定性和抗冲击性;升降台安装板204-9固定在升降台主支架204-10上;升降台输出轴204-6的两端通过升降台轴承204-5转动安装于升降台安装板204-9上,两个末端均固定安装有升降台齿轮204-4;升降台齿轮204-4与齿轮齿条206啮合;升降台电机204-8的壳体固定于升降台安装板204-9上,其输出端与升降台输出轴204-6固定连接;机械臂连接件二311的一端与升降台204的升降台上支架204-3固定连接;伸缩执行元件一303的壳体铰接于升降台204的升降台下支架204-11上。
53.优选地,升降台204还包括吊环204-1;吊环204-1焊接固定在升降台上支架204-3上,在安装和维修时吊环204-1可以起到对升降台204稳定辅助的作用。
54.优选地,升降台204还包括行星减速机204-7;升降台电机204-8的输出端通过行星减速机204-7与升降台输出轴204-6固定连接,行星减速机204-7可以在降低升降台电机204-8转速的同时不减小升降台输出轴204-6的转矩,保证负载能力。
55.优选地,升降台安装板204-9为u形结构的钣金件。
56.优选地,所述升降装置2还包括连接板一202;两个连接板一202分别固定在架体201的底部的左右两侧,增强升降装置2的稳定性。
57.优选地,所述升降装置2还包括连接板二203;若干个连接板二203均匀地固定在架体201的背面上,可以增加架体201的高度且互换性好、方便维修更换。
58.优选地,所述升降装置2还包括架体连接件205,在延伸架体201高度时可以起到连接和稳固架体作用。
59.本发明的工作原理和工作流程是:
60.(1)移动到板材摆放处:车体控制柜101控制万向轮102,带着机器人到达板材的摆放位置,辅助轮103在移动底座1长距离移动或者转弯时辅助运动;通过激光测距传感器精确定位。
61.(2)板材抓取:机器人控制柜5给升降台204发送指令,通过升降台电机204-8带动升降台齿轮204-4运动,通过与齿轮齿条206的啮合,带动机械臂3和末端执行器4下降到适当位置;通过伸缩执行元件一303的回缩,以机械臂连接件二311与升降台204的铰接点为中心,调整机械臂3的水平角度,然后通过控制伸缩执行元件二304来驱动俯仰连杆一305、俯仰连杆二306、机械臂支架312和水平旋转电机支架412构成的四连杆机构来完成末端执行器4的下俯运动,通过水平旋转电机403的旋转带动末端执行器4在水平方向上转动,通过结
构光扫描判断使吸盘402所在平面与板材平面相互平行。
62.再通过竖直旋转电机404的旋转带动末端执行器4在竖直方向上转动,通过平移电机405对吸盘架体401进行横移,使得所有吸盘402的中心与板材的重心重合;然后伸缩执行元件三307伸出,从而带动机械臂内连杆301伸出,使得吸盘402靠近板材,采用限位开关,判断吸盘402与板材的距离,完成板材抓取工作。
63.(3)将抓取后的板材放置在移动底座1上:末端执行器4完成对板材的抓取后,机器人控制柜5给升降台204发送指令通过升降台电机204-8带动升降台齿轮204-4运动,再次通过与齿轮齿条206的啮合,带动机械臂3和末端执行器4上升;然后伸缩执行元件三307回缩,从而带动机械臂内连杆301回缩,使得末端执行器4位于移动底座1的正上方;通过水平旋转电机403的旋转带动末端执行器4在水平方向上转动,使板材与移动底座1的上表面平行;再通过平移电机405对吸盘架体401进行横移,使得板材的重心与移动底座1的上表面的中心重合;然后伸缩执行元件三307伸出,从而带动机械臂内连杆301伸出,最后吸盘402将板材放置在移动底座1上表面;
64.(4)完成板材安装作业:车体控制柜101控制万向轮102,带着机器人运动到板材指定的安装位置;然后机器人控制柜5给末端执行器4发送指令用吸盘402抓取板材后,通过升降台电机204-8带动升降台齿轮204-4运动,通过与齿轮齿条206的啮合,带动机械臂3和末端执行器4升起到指定的安装高度;然后机器人控制柜5控制伸缩执行元件一303伸出,以机械臂连接件二311与升降台204的铰接点为中心,调整机械臂3的水平角度;然后通过控制伸缩执行元件二304来驱动俯仰连杆一305、俯仰连杆二306、机械臂支架312和末端执行器4的水平旋转电机支架412共同构成的四连杆机构来完成末端执行器4的上仰运动,将末端执行器4抓取的板材靠近至安装位置;通过水平旋转电机403的旋转带动末端执行器4在水平方向上转动、竖直旋转电机404的旋转带动末端执行器4在竖直方向上转动,从而矫正板材与安装立面之间的偏移量;然后伸缩执行元件三307伸出,从而带动机械臂内连杆301伸出,将板材安装至目标位置的地轨和天轨中;通过平移电机405对吸盘架体401进行横移,将板材与已安装板材靠紧,然后吸盘402松开,完成安装作业。
65.本发明未述及之处适用于现有技术。