1.本实用新型涉及机器人产品技术领域,尤其涉及一种智能绘本机器人。
背景技术:
2.绘本阅读机器人是专门为儿童早教促进孩子学习兴趣的教育类电子产品,能够全方位训练儿童学习能力,公告号:cn209551716u公开了一种绘本阅读机器人,包括机器人本体,机器人本体的顶部安装有摄像头,机器人本体的前表面设置有扬声器和显示屏;机器人本体的内部设置有pcb板和蓄电池,pcb板上安装有主控芯片,主控芯片分别与显示模块、存储模块、语音模块、电源模块和wifi模块之间电连接;机器人本体的后表面设置有投影镜头和测距传感器,投影镜头、摄像头、显示屏分别与显示模块之间电连接,测距传感器与主控芯片之间电连接;机器人本体的底部设置有无线充电接收模块,无线充电接收模块与电源模块之间电连接。本实用新型能够减小充电线带来的线路杂乱的影响,提高充电过程的整洁,同时,能够将显示屏显示的内容,投影到背后的物体表面,方便儿童及陪读家长的观看;
3.上述技术方案没有设置对机器人进行移动的装置,由于儿童往往比较好动,难以在固定的位置上坐很久,为了配合儿童进行学习,往往需要不断的调整机器人的位置,比较麻烦,所以我们提出一种智能绘本机器人,用于解决上述所提出的问题。
技术实现要素:
4.本实用新型的目的是为了解决现有的技术方案不方便进行移动,在进行移动时存在比较麻烦的缺点,而提出的一种智能绘本机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种智能绘本机器人,包括机器人本体和底座,所述机器人本体固定安装在底座的顶部,所述底座上开设有安装孔,且安装孔内对称转动连接有从动轮,所述从动轮的数量为两个,两个从动轮的底部均延伸至底座的下方,所述底座的顶部转动连接有安装架,且安装架内转动连接有主动轮,所述主动轮的底部延伸至底座的下方,所述安装架的右侧固定安装有驱动电机,且驱动电机的输出轴延伸至安装架内并与主动轮连接有同一个传动组件,所述底座的顶部右侧固定安装有电动推杆,且底座的顶部安装有连接组件,所述连接组件与安装架相连接,所述电动推杆的输出轴与连接组件相连接。
7.优选的,所述底座的顶部固定安装有环形滑轨,所述安装架的底部两侧均开设有滑口,所述环形滑轨分别与两个滑口的内壁滑动连接,能够实现对安装架以及主动轮进行稳定的转向限位和支撑。
8.优选的,所述安装架内转动连接有支撑轴,所述支撑轴贯穿主动轮并与主动轮的内壁固定连接,能够对主动轮进行稳定的转动支撑。
9.优选的,所述传动组件上包括齿环和齿轮,所述齿环固定安装在主动轮的右侧,且齿轮固定安装在驱动电机的输出轴上,所述齿轮与齿环相啮合,能够实现将驱动电机的驱动力传递至主动轮上,并且齿环的直径比齿轮大,所以能够降低主动轮的转动速度。
10.优选的,所述连接组件上包括移动板、连接杆、l型架和连接环,所述移动板滑动连接在底座的顶部,所述电动推杆的输出轴与移动板的右侧固定连接,所述连接杆贯穿移动板并与移动板滑动连接,所述l型架固定安装在安装架的后侧,所述l型架的底部与环形滑轨滑动连接,所述l型架的后侧固定安装有销轴,所述连接环固定安装在连接杆的前端,销轴贯穿连接环并与连接环的内壁转动连接,通过启动电动推杆能够在连接组件的传动下,可带动主动轮进行方向调节。
11.优选的,所述连接杆上套设有位于移动板后侧的压缩弹簧,且压缩弹簧的后端和前端分别连接杆的后端和移动板的后侧固定连接,利用压缩弹簧能够方便带动连接杆向后侧进行复位运动。
12.本实用新型的有益效果:
13.1、本实用新型中,通过启动驱动电机带动齿轮进行转动,此时在齿环的啮合传动下,能够带动主动轮进行转动,在主动轮进行转动时,可与地面的静摩擦力作用下,能够实现移动,以此便会实现机器人本体进行自由移动;
14.2、本实用新型中,在需要对机器人本体的运动方向进行改变时,此时可启动电动推杆,带动移动板向左侧或向右侧进行移动,在移动板向左侧进行移动时,可带动连接杆向左侧进行移动,此时便可使得l型架向左侧进行弧形运动,并且在l型架进行运动时,可带动安装架进行转动,以此能够对主动轮进行转向调节,并且主动轮是向右侧转动,即可使得机器人本体向右侧进行移动,在移动板被电动推杆拉动向右侧进行移动时,此时能够实现带动主动轮向左侧进行转向调节,以此能够使得机器人本体向左侧移动;
15.本实用新型能够方便实现机器人本体进行自行移动,并且在移动的过程中,能够方便实现调节方向,所以能够随着儿童的位置对机器人本体位置调节,因此具有良好的使用方便性能。
附图说明
16.图1为本实用新型提出的一种智能绘本机器人的结构主视图;
17.图2为本实用新型提出的一种智能绘本机器人的内部结构俯视图;
18.图3为本实用新型提出的一种智能绘本机器人的驱动电机和主动轮传动连接结构主视图;
19.图4为本实用新型提出的一种智能绘本机器人的主动轮和支撑轴连接结构三维图;
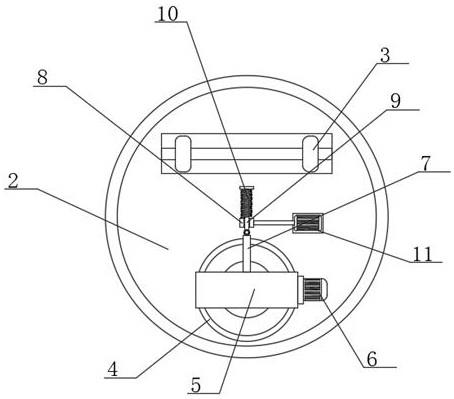
20.图5为本实用新型提出的一种智能绘本机器人的电动推杆、移动板和连接杆连接结构三维图。
21.图中:1机器人本体、2底座、3从动轮、4环形滑轨、5安装架、6驱动电机、7 l型架、8移动板、9连接杆、10压缩弹簧、11电动推杆、12支撑轴、13主动轮、14齿环、15齿轮、16连接环。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的
实施例。
23.参照图1-5,一种智能绘本机器人,包括机器人本体1和底座2,机器人本体1固定安装在底座2的顶部,底座2上开设有安装孔,且安装孔内对称转动连接有从动轮3,从动轮3的数量为两个,两个从动轮3的底部均延伸至底座2的下方,底座2的顶部转动连接有安装架5,且安装架5内转动连接有主动轮13,主动轮13的底部延伸至底座2的下方,安装架5的右侧固定安装有驱动电机6,且驱动电机6的输出轴延伸至安装架5内并与主动轮13连接有同一个传动组件,底座2的顶部右侧固定安装有电动推杆11,且底座2的顶部安装有连接组件,连接组件与安装架5相连接,电动推杆11的输出轴与连接组件相连接。
24.其中,本实用新型能够方便实现机器人本体1进行自行移动,并且在移动的过程中,能够方便实现调节方向,所以能够随着儿童的位置对机器人本体1位置调节,因此具有良好的使用方便性能。
25.本实用新型中,底座2的顶部固定安装有环形滑轨4,安装架5的底部两侧均开设有滑口,环形滑轨4分别与两个滑口的内壁滑动连接,能够实现对安装架5以及主动轮13进行稳定的转向限位和支撑。
26.本实用新型中,安装架5内转动连接有支撑轴12,支撑轴12贯穿主动轮13并与主动轮13的内壁固定连接,能够对主动轮13进行稳定的转动支撑。
27.本实用新型中,传动组件上包括齿环14和齿轮15,齿环14固定安装在主动轮13的右侧,且齿轮15固定安装在驱动电机6的输出轴上,齿轮15与齿环14相啮合,能够实现将驱动电机6的驱动力传递至主动轮13上,并且齿环14的直径比齿轮15大,所以能够降低主动轮13的转动速度。
28.本实用新型中,连接组件上包括移动板8、连接杆9、l型架7和连接环16,移动板8滑动连接在底座2的顶部,电动推杆11的输出轴与移动板8的右侧固定连接,连接杆9贯穿移动板8并与移动板8滑动连接,l型架7固定安装在安装架5的后侧,l型架7的底部与环形滑轨4滑动连接,l型架7的后侧固定安装有销轴,连接环16固定安装在连接杆9的前端,销轴贯穿连接环16并与连接环16的内壁转动连接,通过启动电动推杆11能够在连接组件的传动下,可带动主动轮13进行方向调节。
29.本实用新型中,连接杆9上套设有位于移动板8后侧的压缩弹簧10,且压缩弹簧10的后端和前端分别连接杆9的后端和移动板8的后侧固定连接,利用压缩弹簧10能够方便带动连接杆9向后侧进行复位运动。
30.本实用新型中,本技术方案中的驱动电机6和电动推杆11均与对比文件cn209551716u中的主控芯片进行连接,能够实现对驱动电机6和电动推杆11进行自动控制,在需要对机器人本体1进行移动时,可通过启动驱动电机6带动齿轮15进行转动,此时在齿环14的啮合传动下,能够带动主动轮13进行转动,在主动轮13进行转动时,可与地面的静摩擦力作用下,能够实现移动,以此便会实现机器人本体1进行自由移动,在需要对机器人本体1的运动方向进行改变时,此时可启动电动推杆11,带动移动板8向左侧或向右侧进行移动,在移动板8向左侧进行移动时,可带动连接杆9向左侧进行移动,此时便可使得l型架7向左侧进行弧形运动,并且在l型架7进行运动时,会扩大与移动板8的直线距离,此时便可使得连接杆9向前移动,所以压缩弹簧10便会处于压缩状态,处于压缩状态的压缩弹簧10便会在移动板8反向复位时,能够拉动连接杆9向后侧进行复位移动,在l型架7进行弧形运动时,
可带动安装架5进行转动,以此能够对主动轮13进行转向调节,并且主动轮13是向右侧转动,即可使得机器人本体1向右侧进行移动,在移动板8被电动推杆11拉动向右侧进行移动时,此时能够实现带动主动轮13向左侧进行转向调节,以此能够使得机器人本体1向左侧移动,所以能够随着儿童的位置对机器人本体1位置调节,因此具有良好的使用方便性能。
31.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。