1.本发明涉及一种自动纠偏装置,尤其涉及一种多工位闭环旋转工作台自动纠偏装置。
背景技术:
2.在多工位闭环旋转工作台中,大多数时间会根据工作台的数量让每个工作台能同时旋转到精确位置,显得尤为重要,起初工作台都会设定一个原点位置,由于伺服电机的脉冲当量的分辨率及机械系统周长上的误差,在n次转动后,可能会产生一定的偏差,这种偏差会一直累积下去,从而会使工作台渐渐偏离原点位置,原点偏离后,需要手动重新回归原点,十分麻烦,且重新回归原点,会反复增加停机的频次,降低机器效率。
3.如何设计一种方便人们对多工位闭环旋转工作台进行纠偏,且不易降低机器效率的多工位闭环旋转工作台自动纠偏装置,成为目前要解决的问题。
技术实现要素:
4.为了克服需要手动重新回归原点,十分麻烦,且重新回归原点,会反复增加停机的频次,降低机器效率的缺点,本发明的技术问题是:提供一种方便人们对多工位闭环旋转工作台进行纠偏,且不易降低机器效率的多工位闭环旋转工作台自动纠偏装置。
5.一种多工位闭环旋转工作台自动纠偏装置,包括有支撑底板、固定架、安装底罩、安装顶罩、启动按钮、停止按钮、连接块、第一支撑底座、第二支撑底座、高速计数器、驱动机构和放置机构,支撑底板顶部间隔固接有六个固定架,六个固定架上部之间拆卸式设有安装底罩,安装底罩内底部间隔固接有三个连接块,三个连接块顶部之间固接有安装顶罩,支撑底板顶部右中侧固接有第一支撑底座,第一支撑底座右侧面上部固接有启动按钮和停止按钮,停止按钮位于启动按钮后侧,支撑底板顶部左中侧固接有第二支撑底座,第二支撑底座左侧面上中部安装有用于计算的高速计数器,支撑底板与安装底罩和安装顶罩之间设有用于提供动力的驱动机构,驱动机构和第一支撑底座之间设有用于放置衣物的放置机构,放置机构与高速计数器配合。
6.进一步说明,驱动机构包括有固定底架、伺服电机、驱动轴、第一换向锥齿轮、立式转轴、旋转链轮、传动链条和从动转轴,支撑底板顶部左中侧固接有固定底架,固定底架右部固接有伺服电机,伺服电机的输出轴上连接有驱动轴,固定底架左部转动式设有立式转轴,立式转轴穿过安装底罩和安装顶罩左部,立式转轴与安装底罩和安装顶罩转动连接,立式转轴下部与驱动轴左部都固接有第一换向锥齿轮,两个第一换向锥齿轮相啮合,安装底罩和安装顶罩右部之间转动式设有从动转轴,从动转轴与立式转轴上下两侧都固接有旋转链轮,横向同侧两个旋转链轮之间绕有传动链条。
7.进一步说明,放置机构包括有固定横架、中空支撑板、栅格板、安装架和第一光电传感器,上下两侧传动链条之间均匀间隔安装有固定横架,固定横架顶部固接有中空支撑板,最左方固定横架下部左侧设有栅格板,第一支撑底座左侧面上部固接有安装架,安装架
左部设有第一光电传感器,第一光电传感器与栅格板配合,第一光电传感器还与高速计数器配合。
8.进一步说明,还包括有用于对中空支撑板限位的限位机构,限位机构包括有驱动齿轮、第一从动齿轮、立式短轴、第二换向锥齿轮、第一定位短杆、驱动缺齿轮、第二定位短杆、第二从动齿轮、第一传动组件、换向横轴、定位凸轮、升降横板、限位套筒、第一复位弹簧、限位架、强力磁架、助动滚轮、压力传感器、第一复位导柱和第二复位弹簧,立式转轴下部固接有驱动齿轮,支撑底板左部中间转动式设有立式短轴,立式短轴下部固接有第一从动齿轮,第一从动齿轮与驱动齿轮啮合,第一支撑底座下部右中侧转动式设有第一定位短杆,第一定位短杆左部与立式转轴上部都固接有第二换向锥齿轮,第一定位短杆中部固接有驱动缺齿轮,第一支撑底座下部右中侧转动式设有第二定位短杆,第二定位短杆位于第一定位短杆上侧,第二定位短杆左部固接有第二从动齿轮,第一支撑底座上部中间转动式设有换向横轴,换向横轴右部与第二定位短杆右部之间连接有第一传动组件,第一传动组件由两个皮带轮和皮带组成,一个皮带轮安装于换向横轴右部,另一个皮带轮安装于第二定位短杆右部,皮带绕于两个皮带轮之间,换向横轴左部固接有定位凸轮,第一支撑底座左部上侧前后对称固接有第一复位导柱,前后两侧第一复位导柱之间滑动式设有升降横板,升降横板与定位凸轮滑动连接,第一复位导柱上绕有第二复位弹簧,第二复位弹簧一端与升降横板连接,第二复位弹簧另一端与第一支撑底座连接,升降横板顶部前后对称固接有限位套筒,前后两侧限位套筒之间滑动式设有用于限位固定的限位架,限位架底部与限位套筒内底部之间固接有第一复位弹簧,限位架中部固接有强力磁架,限位架上部间隔转动式设有四个助动滚轮,第一支撑底座左部上前侧设有压力传感器。
9.进一步说明,还包括有用于对衣物吸附固定的吸附机构,吸附机构包括有限位横杆、定位短轴、连接架、缓冲弹簧架、吸附管架、第三复位弹簧、伸缩软管、导气管、固定气管、抽气泵、第二光电传感器、定位底块、第四复位弹簧和顶位滚轮,第一支撑底座上部右侧前后对称转动式设有定位短轴,定位短轴外部固接有限位横杆,限位横杆内侧面左部固接有两个连接架,两个连接架之间滑动式设有缓冲弹簧架,缓冲弹簧架内上部设有用于吸附衣物的吸附管架,缓冲弹簧架底部与连接架下部之间前后对称绕接有第三复位弹簧,左方连接架中部连接有伸缩软管,伸缩软管与吸附管架连接,第一支撑底座中间贯穿有固定气管,固定气管前后两侧都连接有导气管,导气管与伸缩软管连接,固定气管后部连接有抽气泵,第一支撑底座左侧面上后部嵌入式设有第二光电传感器,第一支撑底座前后两侧面右上部都固接有定位底块,定位底块左侧面下部与限位横杆底部右侧之间设有第四复位弹簧,升降横板前后两侧上部都转动式设有顶位滚轮。
10.进一步说明,还包括有用于对中空支撑板清理的清理机构,清理机构包括有防护罩、第二传动组件、旋转立柱、驱动齿盘、安装横轴、第三从动齿轮、清洁毛刷和装灰框,安装顶罩顶部右侧固接有防护罩,安装顶罩右部中间转动式设有旋转立柱,旋转立柱上部与从动转轴上部之间第二传动组件,第二传动组件由两个皮带轮和皮带组成,一个皮带轮安装于从动转轴上部,另一个皮带轮安装于旋转立柱上部,皮带绕于两个皮带轮之间,第二传动组件位于防护罩内,旋转立柱中部固接有驱动齿盘,安装顶罩右部中间转动式设有安装横轴,安装横轴左部固接有第三从动齿轮,第三从动齿轮与驱动齿盘啮合,安装横轴右部固接有用于清理的清洁毛刷,安装底罩外右壁固接有用于存储的装灰框。
11.进一步说明,还包括有用于导向移动的移位辅助机构,移位辅助机构包括有缓冲底座、移动滚轮、第二复位导柱和第五复位弹簧,固定横架内侧间隔固接有四根第二复位导柱,四根第二复位导柱之间上下对称滑动式设有缓冲底座,缓冲底座上转动式设有两个用于导向的移动滚轮,第二复位导柱上绕有第五复位弹簧,第五复位弹簧两端分别与两个缓冲底座内侧面连接。
12.进一步说明,还包括有电控箱,电控箱安装于第二支撑底座右部下侧,电控箱内包括有开关电源、电源模块和控制模块,开关电源为该多工位闭环旋转工作台自动纠偏装置供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;启动按钮、停止按钮、压力传感器、第一光电传感器和第二光电传感器都与控制模块电性连接,强力磁架、伺服电机、抽气泵和高速计数器都与控制模块通过外围电路连接。
13.本发明的有益效果:1、本发明启动伺服电机工作,当栅格板转动与第一光电传感器对应,第一光电传感器输出一组不断变化的方波信号,再通过高速计数器计数后,送入cpu运算,再将运算结果的偏差数据对伺服电机脉冲量进行调整,使旋转工作台方位得到修正,从而实现偏差补偿,达到自动纠偏的功能,如此,确保旋转工作台的原点位置准确。
14.2、本发明在吸附机构的作用下,抽气泵通过固定气管开始吸气,从而吸附管架对中空支撑板上衣物进行吸附,如此,可避免加工时衣物产生移动。
15.3、本发明在清理机构的作用下,清洁毛刷转动带动对中空支撑板进行清理,灰尘或杂物也就掉落至装灰框内,如此,可避免中空支撑板上残留灰尘或杂物。
附图说明
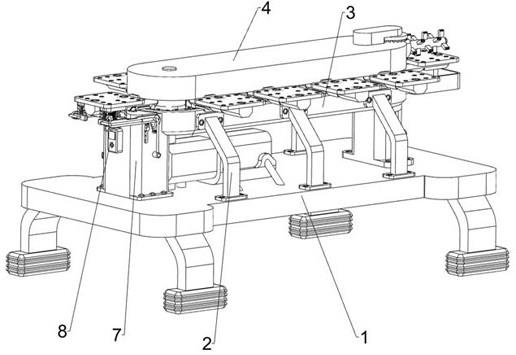
16.图1为本发明的立体结构示意图。
17.图2为本发明的第一种部分立体结构示意图。
18.图3为本发明的驱动机构的部分立体结构示意图。
19.图4为本发明的放置机构的部分立体结构示意图。
20.图5为本发明的第二种部分立体结构示意图。
21.图6为本发明的限位机构的第一种部分立体结构示意图。
22.图7为本发明的限位机构的第二种部分立体结构示意图。
23.图8为本发明a部分的放大示意图。
24.图9为本发明的吸附机构的第一种部分立体结构示意图。
25.图10为本发明的吸附机构的第二种部分立体结构示意图。
26.图11为本发明的吸附机构的第三种部分立体结构示意图。
27.图12为本发明b部分的放大示意图。
28.图13为本发明的第三种部分立体结构示意图。
29.图14为本发明的清理机构的第一种部分立体结构示意图。
30.图15为本发明的清理机构的第二种部分立体结构示意图。
31.图16为本发明的移位辅助机构的部分立体结构示意图。
32.图17为本发明的电路框图。
33.图18为本发明的电路原理图。
34.附图标号:1_支撑底板,2_固定架,3_安装底罩,4_安装顶罩,5_电控箱,51_启动按钮,52_停止按钮,6_连接块,7_第一支撑底座,72_第二支撑底座,8_高速计数器,9_驱动机构,91_固定底架,92_伺服电机,93_驱动轴,94_第一换向锥齿轮,95_立式转轴,96_旋转链轮,97_传动链条,98_从动转轴,10_放置机构,101_固定横架,102_中空支撑板,103_栅格板,104_安装架,105_第一光电传感器,11_限位机构,111_驱动齿轮,112_第一从动齿轮,113_立式短轴,114_第二换向锥齿轮,115_第一定位短杆,116_驱动缺齿轮,117_第二定位短杆,118_第二从动齿轮,119_第一传动组件,1110_换向横轴,1111_定位凸轮,1112_升降横板,1113_限位套筒,1114_第一复位弹簧,1115_限位架,1116_强力磁架,1117_助动滚轮,1118_压力传感器,1119_第一复位导柱,1120_第二复位弹簧,12_吸附机构,121_限位横杆,122_定位短轴,123_连接架,124_缓冲弹簧架,125_吸附管架,126_第三复位弹簧,127_伸缩软管,128_导气管,129_固定气管,1210_抽气泵,1211_第二光电传感器,1212_定位底块,1213_第四复位弹簧,1214_顶位滚轮,13_清理机构,131_防护罩,132_第二传动组件,133_旋转立柱,134_驱动齿盘,135_安装横轴,136_第三从动齿轮,137_清洁毛刷,138_装灰框,14_移位辅助机构,141_缓冲底座,142_移动滚轮,143_第二复位导柱,144_第五复位弹簧。
具体实施方式
35.下面结合附图对本发明进行具体描述。
36.实施例1一种多工位闭环旋转工作台自动纠偏装置,如图1-图4所示,包括有支撑底板1、固定架2、安装底罩3、安装顶罩4、启动按钮51、停止按钮52、连接块6、第一支撑底座7、第二支撑底座72、高速计数器8、驱动机构9和放置机构10,支撑底板1顶部间隔固接有六个固定架2,六个固定架2上部之间拆卸式设有安装底罩3,安装底罩3内底部间隔固接有三个连接块6,三个连接块6顶部之间固接有安装顶罩4,支撑底板1顶部右中侧固接有第一支撑底座7,第一支撑底座7右侧面上部固接有启动按钮51和停止按钮52,停止按钮52位于启动按钮51后侧,支撑底板1顶部左中侧固接有第二支撑底座72,第二支撑底座72左侧面上中部安装有高速计数器8,高速计数器8可实现计数后,送入cpu运算,再将运算结果的偏差数据对进行纠偏,支撑底板1与安装底罩3和安装顶罩4之间设有驱动机构9,驱动机构9和第一支撑底座7之间设有放置机构10,放置机构10可实现放置衣物,驱动机构9可实现放置机构10转动提供动力,放置机构10与高速计数器8配合。
37.驱动机构9包括有固定底架91、伺服电机92、驱动轴93、第一换向锥齿轮94、立式转轴95、旋转链轮96、传动链条97和从动转轴98,支撑底板1顶部左中侧固接有固定底架91,固定底架91右部固接有伺服电机92,伺服电机92的输出轴上连接有驱动轴93,固定底架91左部转动式设有立式转轴95,立式转轴95穿过安装底罩3和安装顶罩4左部,立式转轴95与安装底罩3和安装顶罩4转动连接,立式转轴95下部与驱动轴93左部都固接有第一换向锥齿轮94,两个第一换向锥齿轮94相啮合,安装底罩3和安装顶罩4右部之间转动式设有从动转轴98,从动转轴98与立式转轴95上下两侧都固接有旋转链轮96,横向同侧两个旋转链轮96之间绕有传动链条97。
38.放置机构10包括有固定横架101、中空支撑板102、栅格板103、安装架104和第一光
电传感器105,上下两侧传动链条97之间均匀间隔安装有固定横架101,固定横架101顶部固接有中空支撑板102,最左方固定横架101下部左侧设有栅格板103,第一支撑底座7左侧面上部固接有安装架104,安装架104左部设有第一光电传感器105,第一光电传感器105与栅格板103配合,第一光电传感器105还与高速计数器8配合。
39.人们按下电源总开关,将本装置上电,首先操作人员按动启动按钮51一次,启动按钮51发出信号,控制模块接收信号后控制伺服电机92工作5秒,伺服电机92带动驱动轴93转动,驱动轴93转动通过第一换向锥齿轮94带动立式转轴95转动,立式转轴95转动带动左方旋转链轮96转动,左右两侧旋转链轮96转动配合带动传动链条97转动,传动链条97转动带动固定横架101转动,固定横架101转动带动中空支撑板102转动,5秒后,控制模块控制伺服电机92停止,如此反复,可进行工位调节,当最左方固定横架101带动栅格板103转动至与第一光电传感器105对应,第一光电传感器105发出信号,控制模块接收信号后控制伺服电机92停止,然后第一光电传感器105输出一组不断变化的方波信号,再通过高速计数器8计数后,送入cpu运算,再将运算结果的偏差数据对伺服电机92脉冲量进行调整,使工作台方位得到修正,从而实现偏差补偿,达到自动纠偏的功能,确保工作台的原点位置准确。
40.实施例2在实施例1的基础之上,如图5-图14所示,还包括有限位机构11,限位机构11包括有驱动齿轮111、第一从动齿轮112、立式短轴113、第二换向锥齿轮114、第一定位短杆115、驱动缺齿轮116、第二定位短杆117、第二从动齿轮118、第一传动组件119、换向横轴1110、定位凸轮1111、升降横板1112、限位套筒1113、第一复位弹簧1114、限位架1115、强力磁架1116、助动滚轮1117、压力传感器1118、第一复位导柱1119和第二复位弹簧1120,立式转轴95下部固接有驱动齿轮111,支撑底板1左部中间转动式设有立式短轴113,立式短轴113下部固接有第一从动齿轮112,第一从动齿轮112与驱动齿轮111啮合,第一支撑底座7下部右中侧转动式设有第一定位短杆115,第一定位短杆115左部与立式转轴95上部都固接有第二换向锥齿轮114,第一定位短杆115中部固接有驱动缺齿轮116,第一支撑底座7下部右中侧转动式设有第二定位短杆117,第二定位短杆117位于第一定位短杆115上侧,第二定位短杆117左部固接有第二从动齿轮118,第一支撑底座7上部中间转动式设有换向横轴1110,换向横轴1110右部与第二定位短杆117右部之间连接有第一传动组件119,第一传动组件119由两个皮带轮和皮带组成,一个皮带轮安装于换向横轴1110右部,另一个皮带轮安装于第二定位短杆117右部,皮带绕于两个皮带轮之间,换向横轴1110左部固接有定位凸轮1111,第一支撑底座7左部上侧前后对称固接有第一复位导柱1119,前后两侧第一复位导柱1119之间滑动式设有升降横板1112,升降横板1112与定位凸轮1111滑动连接,第一复位导柱1119上绕有第二复位弹簧1120,第二复位弹簧1120一端与升降横板1112连接,第二复位弹簧1120另一端与第一支撑底座7连接,升降横板1112顶部前后对称固接有限位套筒1113,前后两侧限位套筒1113之间滑动式设有用于限位固定的限位架1115,限位架1115底部与限位套筒1113内底部之间固接有第一复位弹簧1114,限位架1115中部固接有强力磁架1116,限位架1115卡入固定横架101内,从而强力磁架1116工作对固定横架101吸附固定,限位架1115上部间隔转动式设有四个助动滚轮1117,第一支撑底座7左部上前侧设有压力传感器1118。
41.还包括有吸附机构12,吸附机构12包括有限位横杆121、定位短轴122、连接架123、缓冲弹簧架124、吸附管架125、第三复位弹簧126、伸缩软管127、导气管128、固定气管129、
抽气泵1210、第二光电传感器1211、定位底块1212、第四复位弹簧1213和顶位滚轮1214,第一支撑底座7上部右侧前后对称转动式设有定位短轴122,定位短轴122外部固接有限位横杆121,限位横杆121内侧面左部固接有两个连接架123,两个连接架123之间滑动式设有缓冲弹簧架124,缓冲弹簧架124内上部设有,吸附管架125可实现对衣物吸附固定,缓冲弹簧架124底部与连接架123下部之间前后对称绕接有第三复位弹簧126,左方连接架123中部连接有伸缩软管127,伸缩软管127与吸附管架125连接,第一支撑底座7中间贯穿有固定气管129,固定气管129前后两侧都连接有导气管128,导气管128与伸缩软管127连接,固定气管129后部连接有抽气泵1210,第一支撑底座7左侧面上后部嵌入式设有第二光电传感器1211,第一支撑底座7前后两侧面右上部都固接有定位底块1212,定位底块1212左侧面下部与限位横杆121底部右侧之间设有第四复位弹簧1213,升降横板1112前后两侧上部都转动式设有顶位滚轮1214。
42.还包括有清理的清理机构13,清理机构13包括有防护罩131、第二传动组件132、旋转立柱133、驱动齿盘134、安装横轴135、第三从动齿轮136、清洁毛刷137和装灰框138,安装顶罩4顶部右侧固接有防护罩131,安装顶罩4右部中间转动式设有旋转立柱133,旋转立柱133上部与从动转轴98上部之间第二传动组件132,第二传动组件132由两个皮带轮和皮带组成,一个皮带轮安装于从动转轴98上部,另一个皮带轮安装于旋转立柱133上部,皮带绕于两个皮带轮之间,第二传动组件132位于防护罩131内,旋转立柱133中部固接有驱动齿盘134,安装顶罩4右部中间转动式设有安装横轴135,安装横轴135左部固接有第三从动齿轮136,第三从动齿轮136与驱动齿盘134啮合,安装横轴135右部固接有清洁毛刷137,清洁毛刷137可实现对中空支撑板102清理,安装底罩3外右壁固接有装灰框138,装灰框138可实现对清理产生的杂物或灰尘进行收集。
43.初始时,升降横板1112与压力传感器1118接触,压力传感器1118发出信号,控制模块接收信号后控制强力磁架1116通磁,限位架1115通过强力磁架1116对其中一个固定横架101吸附固定,当伺服电机92工作时,立式转轴95转动带动驱动齿轮111转动,驱动齿轮111转动带动第一从动齿轮112转动,第一从动齿轮112转动带动立式短轴113转动,立式短轴113转动通过第二换向锥齿轮114带动第一定位短杆115转动,第一定位短杆115转动带动驱动缺齿轮116转动,驱动缺齿轮116转动带动第二从动齿轮118转动,第二从动齿轮118转动带动第二定位短杆117转动,第二定位短杆117转动带动第一传动组件119转动,第一传动组件119转动带动换向横轴1110转动,换向横轴1110转动带动定位凸轮1111向下摆动,定位凸轮1111向下摆动带动升降横板1112向下移动,第二复位弹簧1120被压缩,且升降横板1112与压力传感器1118脱离,压力传感器1118发出信号,控制模块接收信号后控制强力磁架1116失磁,升降横板1112向下移动带动限位套筒1113向下移动,限位套筒1113向下移动带动限位架1115向下移动,限位架1115向下移动带动强力磁架1116向下移动,同时传动链条97带动下个固定横架101转动至与限位架1115对应,助动滚轮1117起到导向作用,进而驱动缺齿轮116继续转动与第二从动齿轮118脱离,因第二复位弹簧1120的作用,升降横板1112带动限位套筒1113向上移动复位,限位架1115也就卡入固定横架101内,第一复位弹簧1114起到缓冲作用,且升降横板1112再次与压力传感器1118接触,压力传感器1118发出信号,控制模块接收信号后控制强力磁架1116通磁,限位架1115通过强力磁架1116对固定横架101吸附固定,5秒后,控制模块控制伺服电机92停止,如此,可避免固定横架101产生移动。
44.当伺服电机92工作时,升降横板1112向上移动带动顶位滚轮1214向上移动,顶位滚轮1214向上移动带动限位横杆121向上摆动,第四复位弹簧1213被拉伸,限位横杆121向上摆动带动连接架123向上摆动,连接架123向上摆动带动缓冲弹簧架124向上移动,缓冲弹簧架124向上移动与中空支撑板102接触,第三复位弹簧126起到缓冲作用,同时,第二光电传感器1211检测到连接架123与其对应,第二光电传感器1211发出信号,控制模块接收信号后控制抽气泵1210工作,抽气泵1210通过固定气管129开始吸气,从而吸附管架125对中空支撑板102上衣物进行吸附,5秒后,控制模块控制伺服电机92停止,人们即可对衣物进行后续加工,加工完成后,按动停止按钮52一次,停止按钮52发出信号,控制模块接收信号后控制抽气泵1210停止,进而人们再次按动启动按钮51驱动伺服电机92工作时,升降横板1112带动顶位滚轮1214向下移动,因第四复位弹簧1213的作用,限位横杆121也就通过连接架123带动缓冲弹簧架124向下摆动,如此,可避免加工时衣物产生移动。
45.当伺服电机92工作时,从动转轴98转动带动第二传动组件132转动,第二传动组件132转动带动旋转立柱133转动,旋转立柱133转动带动驱动齿盘134转动,驱动齿盘134转动带动第三从动齿轮136转动,第三从动齿轮136转动带动清洁毛刷137转动,清洁毛刷137转动带动对中空支撑板102进行清理,灰尘或杂物也就掉落至装灰框138内,进而伺服电机92停止时,从动转轴98停止通过第二传动组件132带动旋转立柱133转动,清洁毛刷137也就停止转动,再对装灰框138内灰尘或杂物进行清理,如此,可避免中空支撑板102上残留灰尘或杂物。
46.实施例3在实施例1和实施例2的基础之上,如图15和图16所示,还包括有移位辅助机构14,移位辅助机构14包括有缓冲底座141、移动滚轮142、第二复位导柱143和第五复位弹簧144,固定横架101内侧间隔固接有四根第二复位导柱143,四根第二复位导柱143之间上下对称滑动式设有缓冲底座141,缓冲底座141上转动式设有移动滚轮142,移动滚轮142可实现对固定横架101进行导向,第二复位导柱143上绕有第五复位弹簧144,第五复位弹簧144两端分别与两个缓冲底座141内侧面连接。
47.当传动链条97带动固定横架101转动时,移动滚轮142可起到导向作用,且第五复位弹簧144则起到一定缓冲作用,如此,可使得固定横架101移动更舒畅。
48.如图2、图17和图18所示,还包括有电控箱5,电控箱5安装于第二支撑底座72右部下侧,电控箱5内包括有开关电源、电源模块和控制模块,开关电源为该多工位闭环旋转工作台自动纠偏装置供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;启动按钮51、停止按钮52、压力传感器1118、第一光电传感器105和第二光电传感器1211都与控制模块电性连接,强力磁架1116、伺服电机92、抽气泵1210和高速计数器8都与控制模块通过外围电路连接。
49.上述实施例是提供给熟悉本领域内的人员来实现或使用本发明的,熟悉本领域的人员可在不脱离本发明的发明思想的情况下,对上述实施例做出种种修改或变化,因而本发明的保护范围并不被上述实施例所限,而应该是符合权利要求书提到的创新性特征的最大范围。