1.本发明涉及高电压与绝缘技术领域,具体涉及一种适用于35kv以下(包括35kv)的可拆装的高压带电作业机器人绝缘防护外壳。
背景技术:
2.高压带电作业是在高压电气设备上不停电进行检修、测试的一种作业形式,高压带电作业的对象包括高压架空输电线路、配电线路和配电设备。现在大部分高压带电作业主要是操作人员站在绝缘斗臂车上在高空完成各种操作,操作人员作业时将面临高电压、强电磁场的威胁;而且作业时条件恶劣、空间局促、劳动强度大、精神高度紧张,容易引发各种安全事故。
3.随着机器人、人工智能等技术的发展,采用机器人替代人工完成高压带电作业,既减轻了作业人员的劳动强度,又提高了作业效率,最大程度保证了作业人员的安全,其应用前景十分广阔。采用机器人进行带电作业时,由于机器人多采用金属外壳,极易发生高压触电和受到电磁干扰,因此对机器人加装绝缘防护外壳是必然的选择。
4.目前已有的机器人绝缘防护多采用绝缘材料,制作成多层外壳,以绝缘粘结剂粘合的方式实现绝缘外壳的安装和固定,这种形式的绝缘外壳一旦采用绝缘粘结剂粘合,如需要拆卸只能破坏绝缘外壳,不能重复使用,增加了高压带电作业机器人的使用成本。
技术实现要素:
5.本发明为解决现有技术中机器人绝缘防护外壳采用绝缘粘结剂粘合导致拆装不方便的技术问题,提出了一种可拆装的高压带电作业机器人绝缘防护外壳,可重复使用,适用于高压带电作业机器人的绝缘防护要求,外观简洁美观,能保证高压带电作业机器人的各项正常工作。
6.本发明的技术方案:
7.一种可拆装的高压带电作业机器人绝缘防护外壳,所述绝缘防护外壳由绝缘材料组成,其厚度大于3mm,通过卡箍与作业机械臂表面紧密贴合。
8.进一步地,所述绝缘防护外壳采用abs塑料或其他硬质绝缘材料,对20kv及20kv以下的系统带电作业机器人,绝缘层厚度不小于3mm且3min层向耐压不低于30kv,击穿电压不低于40kv;对35kv系统带电作业机器人,绝缘层厚度不小于4mm且3min层向耐压不低于40kv,击穿电压不低于50kv。
9.进一步地,所述绝缘防护外壳在机械臂直臂部分由两半相同的防护壳体拼接而成,拼接接缝处采用凸隼结构,凸隼深度不小于5mm,接缝内填有高压绝缘脂,并在表面覆盖高压绝缘胶带,高压绝缘胶带的宽度不小于5cm。
10.进一步地,机械臂关节部分外加绝缘护套,对10kv系统带电作业机器人,最小爬电距离不小于5cm且3min沿面耐压不低于20kv,沿面闪络电压不低于30kv;对20kv系统带电作业机器人,最小爬电距离不小于10cm且3min沿面耐压不低于30kv,沿面闪络电压不低于
40kv;对35kv系统带电作业机器人,最小爬电距离不小于15cm且3min沿面耐压不低于40kv,沿面闪络电压不低于50kv。
11.进一步地,机械臂的直臂部分与关节部分均采用卡箍来固定。
12.采用上述技术方案后,本发明提供的一种可拆装的高压带电作业机器人绝缘防护外壳,与现有技术相比,具有以下有益效果:
13.1、本发明采用不小于3mm的绝缘防护外壳,既保证了机械强度,又满足机器人带电作业时的绝缘要求。
14.2、本发明的绝缘防护外壳采用插槽式拼接,并采用绝缘卡箍固定,转动部分采用外加绝缘护套设计,外壳表面没有贯穿壳体的孔洞,接缝处采用高压绝缘胶带覆盖,可满足外壳的高压防护要求。
附图说明
15.图1为本实施例提供的机械臂与绝缘防护外壳安装的整体结构示意图;
16.图2为本实施例提供的机械臂直臂部分的防护壳体示意图;
17.图3为图2中a处放大图;
18.图4为本实施例提供的机械臂关节部分的绝缘护套结构示意图;
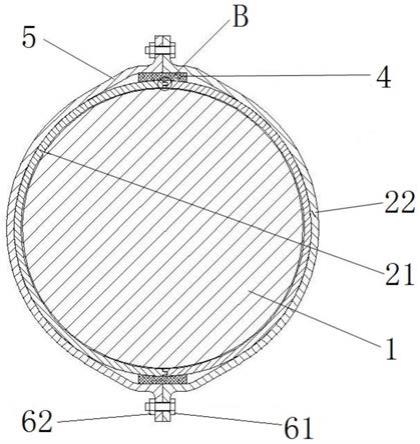
19.图5为本实施例提供的固定卡箍的安装结构图;
20.图6为图5中b处放大图。
21.其中,机械臂1,第一防护壳体21,第二防护壳体22,高压绝缘脂3,高压绝缘胶带4,卡箍5,尼龙螺钉61,尼龙螺母62,绝缘护套7。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
24.除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
25.在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
26.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
27.此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本发明保护范围的限制。
28.如图1-6所示,本实施例的绝缘防护外壳为单层结构,厚度大于3mm,适用于串联式机器人,由abs塑料或其他易加工成型的硬质绝缘材料加工而成,通过卡箍5与机械臂1表面紧密贴合。
29.20kv至35kv高压带电作业机器人绝缘防护外壳的材料及厚度均应满足以下要求:
30.(1)对20kv及20kv以下的系统带电作业机器人,绝缘层厚度不小于3mm且3min层向耐压不低于30kv,击穿电压不低于40kv;
31.(2)对35kv系统带电作业机器人,绝缘层厚度不小于4mm且3min层向耐压不低于40kv,击穿电压不低于50kv。
32.如图2-3和6,所述绝缘壳体在机械臂1直臂部分为一体化结构,采用两半相同结构的防护壳体拼接而成,分别为第一防护壳体21和第二防护壳体22,拼接处采用凸隼插接的方式,插接的凸隼深度不小于5mm,接缝内填有高压绝缘脂3,并在表面采用高压绝缘胶带4覆盖,高压绝缘胶带4宽度不小于5cm。高压绝缘脂3是由改性硅油、超纯绝缘填料并添加功能助剂等,经特殊工艺制成的绝缘油膏。此绝缘硅脂具有优异的耐高压、防水、防爬电性能,设计用于10kv以上的高压电缆连接系统和电气设备的绝缘、密封润滑及防潮,并能减少不稳定气候造成的材料表面的老化,适用温度范围-40~+200℃。直臂部分防护壳体的固定采用与防护壳体同材料制成的卡箍5、尼龙螺钉61和尼龙螺母62固定,其宽度不小于2cm,厚度不小于3mm,因此整个防护壳体的表面不会出现贯穿的孔洞,保证外壳的高压防护功能。
33.如图4-6,机械臂1关节部分为插槽拼接结构,拼接处防护壳体两侧分别加装绝缘护套7,绝缘护套7采用与防护壳体一样的绝缘材料,采用两面拼接的方式,其拼接面与直臂部分的拼接面错开90度,绝缘护套7的固定采用卡箍5来固定,卡箍5由两个半圆组成,其宽度不小于2cm,厚度不小于3mm,用尼龙螺钉61和尼龙螺母62拧合固定,以保证机器人即机械臂1的正常活动。
34.绝缘护套7的沿面绝缘性能应满足以下要求:
35.(1)对10kv系统带电作业机器人,最小爬电距离不小于5cm且3min沿面耐压不低于20kv,沿面闪络电压不低于30kv;
36.(2)对20kv系统带电作业机器人,最小爬电距离不小于10cm且3min沿面耐压不低于30kv,沿面闪络电压不低于40kv;
37.(3)对35kv系统带电作业机器人,最小爬电距离不小于15cm且3min沿面耐压不低于40kv,沿面闪络电压不低于50kv。
38.这样,本实施例的机械臂1绝缘防护外壳采用单层壳体的结构,壳体由abs塑料或其他易加工成型的硬质绝缘材料加工而成,厚度不小于3mm,壳体组件均为3d打印或开模加工的一体化结构,采用两面拼接的方式,接缝里填入高压绝缘脂3进行密封,外表面再贴上高压绝缘胶带4,以保证接缝处的绝缘性能。关节与直臂外壳的连接处,外加绝缘护套7,以增大绝缘爬电距离,护套内腔填入高压绝缘脂3,以增强护套的绝缘性能。外壳采用卡箍5来固定,卡箍5采用与外壳一样的绝缘材料制成,两端采用尼龙螺钉61和尼龙螺母62固定,因此外壳表面不会出现贯穿壳体的孔洞。
39.由上述内容可知,本实施例提供的一种可拆装的高压带电作业机器人绝缘防护外壳,拆装方便,可重复使用,适用于高压带电作业机器人的绝缘防护要求,外观简洁美观,能保证高压带电作业机器人的各项正常工作。
40.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。