1.本实用新型涉及一种机器人测试设备,具体涉及一种用于机器人稳定性、爬坡和防跌落性能测试平台。
背景技术:
2.稳定性、爬坡和防跌落性能是移动机器人的三大重点指标,第三方检测机构实施检测时,往往参照标准临时搭建一个简易的平台来测试机器人的性能,比如用木块拼装成斜坡或者台阶形式,或者临时用木条钉一个平台。这种方式,一方面低效、浪费宝贵的测试时间,另一方面需要大片的区域存放这些木块。此外,送检方除了被告知通过与否之外,无法得到产品定量的性能指标。目前,移动机器人产品日趋普及,而随之而来的检测认证工作也越来越繁重,传统的试验方式已经不能满足当前的检测要求。本实用新型的引入,能够提高检测的效率,节省试验测试场地资源,同时可以输出定量的性能指标,提升测试认证的智能化水平。
技术实现要素:
3.本实用新型的目的是在于提供一种用于机器人稳定性、爬坡和防跌落性能测试平台,为移动机器人的性能测试,提供一个更高效、更准确、更智能、更美观的试验平台;对检测机构而言,可以节省制作和存放试验装置所需的资源,简化试验过程的操作步骤;对于送检单位而言,除了知道性能满足要求与否,还可以掌握产品定性的性能指标。
4.为了达到上述目的,本实用新型采用以下技术方案:
5.一种用于机器人稳定性、爬坡和防跌落性能测试平台,包括:底部框架、升降总成、上平面、斜坡面、尾板、角度指示盘、触摸屏、控制柜,所述底部框架上面通过升降总成连接上平面,上平面后端铰接斜坡面,且在铰接处侧面设置角度指示盘,斜坡面后端铰接尾板,构成机器人的测度平台;所述触摸屏、电控柜放置在测度平台附近,并且电控柜分别电连接升降总成和触摸屏。
6.优选的,所述的底部框架由矩形钢和槽钢焊接而成,所述矩形钢上设有铰链孔和螺钉过孔,底部框架通过铰链轴与升降总成相连,并通过螺栓固定在地面上;所述槽钢点焊于矩形钢上,为升降总成的导向轮提供导向槽。
7.优选的,所述的上平面,包括:矩形钢框架a、平板a、重载合页,所述平板a安装在矩形钢框架a上,与移动机器人轮子直接接触;矩形钢框架a内侧上焊接槽钢,为升降总成的导向轮提供导向槽;所述重载合页连接上平面与斜坡面,便于两个平面之间互相转动。
8.优选的,所述的升降总成,包括:连杆、导向轮a、导向轮轴a和电动推杆,一侧连杆的底端通过铰链轴与底部框架连接,另一侧连杆底端通过导向轮轴a与导向轮a连接,且导向轮a可以在底部框架的槽钢内滑动,且上下对称分布,所述升降总成的一侧连杆的顶端通过铰链轴与上平面连接,另一侧连杆顶端通过导向轮轴a与导向轮a连接,且导向轮a可以在上平面的槽钢内滑动;整个升降总成呈“剪刀叉”形式,连接底部框架和上平面。
9.优选的,所述的斜坡面,包括:矩形钢框架b、平板b、导向轮b、导向轮轴b、中载合页,所述平板b安装于矩形钢框架b上,与移动机器人轮子直接接触;所述导向轮b通过导向轮轴b与斜坡面的矩形框架b连接,同时导向轮b可在底部框架的槽钢内前后滑动;所述中载合页连接尾板与斜坡面。
10.优选的,所述的尾板,包括:轻质踏板、小滚轮、小滚轮轴。轻质踏板的一端通过中载合页与斜坡面连接,另一端通过小滚轮轴与小滚轮连接。
11.优选的,所述的触摸屏,用于人机交互、显示测试平台的运行状态以及操作人员设置参数。
12.优选的,所述的电控柜,内部放置控制器、驱动器、继电器,方便电气检修。
13.优选的,所述的角度指示盘,用于指示当前斜坡的角度,便于操作人员直观读数。
14.优选的,所述的斜坡面和上平面周围设置可快速拆装,用于防护机器人意外跌落的扶手。
15.本实用新型相对现有技术取得以下有益效果:
16.采用本实用新型提供的测试平台后,移动机器人的性能测试将更高效、更准确、更智能、更美观。对检测机构而言,可以节省制作和存放试验装置所需的资源,简化试验过程的操作步骤;对于送检单位而言,除了知道性能满足要求与否,还可以掌握产品定性的性能指标。
附图说明
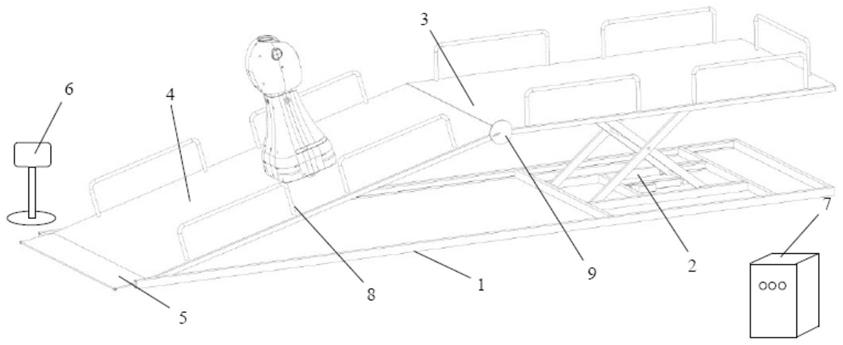
17.图1为本实用新型的整体结构示意图;
18.图2为本实用新型的结构主视图;
19.图3为底部框架示意图;
20.图4为升降总成示意图;
21.图5为装置升到最高位置(或斜坡最大角度)示意图;
22.图6为装置降到最低位置(或斜坡最小角度)示意图;
23.图7为装置的机构运动简图;
24.附图标记说明:1-底部框架;11-铰链轴;2-升降总成;21-连杆;22-导向轮a;23-导向轮轴a;24-电动推杆;3-上平面;31-矩形钢框架a;32-平板a;33-重载合页;4-斜坡面;41-矩形钢框架b;42-平板b;43-导向轮b;44-导向轮轴b;45-中载合页;5-尾板;51-轻质踏板;52-小滚轮;53-小滚轮轴;6-触摸屏;7-电控柜;8-扶手;9-角度指示盘。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.如图1至图7所示,本实用新型提供的一种用于机器人稳定性、爬坡和防跌落性能测试平台,其包括:底部框架1,升降总成2、上平面3、斜坡面4、尾板5、触摸屏6、控制柜7、扶手8和角度指示盘9。底部框架1上面通过升降总成2连接上平面3,上平面3后端铰接斜坡面
4,且在铰接处侧面设置角度指示盘9,斜坡面4后端铰接尾板5,构成机器人的测度平台,触摸屏6、电控柜7放置在测度平台附近,并且电控柜7分别电连接升降总成2和触摸屏6。
27.底部框架1,由矩形钢和槽钢焊接而成,槽钢为导向轮a22和导向轮b43提供导向槽,通过铰链轴11与升降总成2相连,由螺钉与地面连接;
28.上平面3,包括:矩形钢框架a31、平板a32、重载合页33。平板a32安装在矩形钢框架a31上,与移动机器人轮子直接接触。槽钢焊接于矩形钢框架a31内侧,为升降总成2的导向轮a22提供导向槽。重载合页33,连接上平面3与斜坡面4,便于两个平面之间互相转动。
29.升降总成2,包括:连杆21、导向轮a22、导向轮轴a23和电动推杆24。一侧连杆21的底端通过铰链轴11与底部框架1连接,另一侧连杆21底端通过导向轮轴a23与导向轮a22连接,且导向轮a22可以在底部框架1的槽钢内滑动。上下对称分布,所述升降总成2的一侧连杆21的顶端通过铰链轴11与上平面3连接,另一侧连杆21顶端通过导向轮轴a23与导向轮a22连接,且导向轮a22可以在上平面3的槽钢内滑动。整个升降总成2呈“剪刀叉”形式,连接这底部框架1和上平面3,具有较大的升高压缩比,既有较高的顶升行程,又有较低的设备高度。
30.斜坡面4,包括:矩形钢框架b41、平板b42、导向轮b43、导向轮轴b44、中载合页45。平板b42安装于矩形钢框架b41上,与移动机器人轮子直接接触。导向轮b43通过导向轮轴b44与斜坡面4的矩形框架b41连接,同时导向轮b43可在底部框架1的槽钢内前后滑动。中载合页45,连接尾板5与斜坡面4。
31.尾板5,包括:轻质踏板51、小滚轮52、小滚轮轴53。轻质踏板51的一端通过中载合页45与斜坡面4连接,另一端通过小滚轮轴53与小滚轮52连接。当斜坡面4运动时,尾板5可随之运动,运动中小滚轮53与地面接触,减少了尾板5与地面的摩擦。
32.扶手8,安装于斜坡面4和上平面3四周;角度指示盘9,安装在上平面3的矩形钢框架a31上。
33.本说明书中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。