1.本实用新型涉及机器人抓取末端执行器技术领域,尤其涉及一种具备自检功能的抓取装置。
背景技术:
2.目前工业机器人广泛应用于3c(计算机、通讯、消费电子)、物流、制造等行业。末端执行器作为工业机器人进行抓取执行工具,其抓取能力、操作稳定性等对设备的效率和可靠性具有重要的影响。
3.零部件深料框抓取现在面临的种类多,尺寸不一、相互堆叠等问题,3d视觉无序方案虽然解决了产品尺寸、空间位置等方案中预先设定的问题。在机器人深料框分拣中,3d相机的应用解决了“眼”的问题,但末端抓取能力有限,适应性较差,制约着整个行业的发展应用。
4.然而料框中的工件堆叠无序,存在待抓取的工件与相邻的工件相互干涉、导致待抓取的工件卡住,无法抓起,影响正常的上料过程。
技术实现要素:
5.有鉴于此,有必要提供一种具备自检功能的抓取装置,用以解决料框中的工件堆叠无序,存在待抓取的工件与相邻的工件相互干涉、导致待抓取的工件卡住,无法抓起,影响正常的上料过程的问题。
6.本实用新型提供一种具备自检功能的抓取装置,用于机器人,包括与机器人连接的自检组件、具有一输出端的驱动组件以及具有一抓取端的抓取组件,所述驱动组件的输出端与所述抓取端连接,以供驱动抓取端抓取工件;所述自检组件包括多维力传感器,所述多维力传感器与机器人连接,所述多维力传感器的检测端与所述驱动组件连接,以供根据受力检测抓取端是否抓取到工件;所述抓取端包括与驱动组件的输出端相连接且相对设置的两个手指,两个所述手指之间形成一抓取间隙,以供抓取工件,所述手指均经由一快换组件与所述驱动组件的输出端可拆卸连接。
7.进一步的,该装置还包括一缓冲组件,所述三维传感器的输出端经由缓冲组件与所述驱动组件连接。
8.进一步的,所述缓冲组件包括第一连接板、第二连接板以及弹性件,所述第一连接板与所述多维力传感器的输出端固定连接,所述第二连接板与所述驱动组件固定连接,所述第一连接板和所述第二连接板之间经由弹性件连接。
9.进一步的,所述弹性件的数量为多个,多个所述弹性件沿所述连接板的边缘周向均匀布置,所述弹性件均包括缓冲弹簧导杆、第一弹簧、第二弹簧、固定块,所述缓冲弹簧导杆的底端与所述第一连接板固定连接,所述缓冲弹簧导杆的顶端穿过所述第二连接板、并与所述固定块固定连接,所述第一弹簧和第二弹簧均设于所述缓冲弹簧导杆上,所述第一弹簧的底端与所述第一连接板抵接,所述第一弹簧的顶端与所述第二连接板抵接,所述第
二弹簧的底端与所述第二连接板抵接,所述第二弹簧的顶端与所述固定块抵接。
10.进一步的,所述第二连接板上设置有圆孔,所述圆孔内安装有直线轴承,所述缓冲弹簧导杆的与所述直线轴承的内圈滑动连接。
11.进一步的,所述第二连接板的两侧均设置有垫片,所述垫片设于所述缓冲弹簧导杆上,两个所述垫片相对的一端与所述第二连接板抵接,两个所述垫片相背的一端与所述第一弹簧和/或第二弹簧抵接。
12.进一步的,所述多维力传感器为三维力传感器。
13.进一步的,所述多维力传感器的顶部固定连接有第一夹板,所述第一夹板经由连接法兰与机器人连接,所述多维力传感器的底端为检测端,所述检测端经由第二夹板与驱动组件连接。
14.进一步的,所述多维力传感器的检测端经由一加长杆与所述驱动组件连接。
15.进一步的,所述快换组件为一连接块,所述连接块固定设于所述驱动组件的输出端上,所述连接块经由固定螺栓与所述手指可拆卸连接。
16.进一步的,所述驱动组件为平动两指气爪。
17.与现有技术相比,通过设置与机器人连接的自检组件、具有一输出端的驱动组件以及具有一抓取端的抓取组件,驱动组件的输出端与抓取端连接,以供驱动抓取端抓取工件,自检组件包括多维力传感器,多维力传感器与机器人连接,多维力传感器的检测端与驱动组件连接,以供根据受力检测抓取端是否抓取到工件,若受力等于单个工件的重力大小,则判断抓取成功,若受力为0则,则未抓取成功,重新抓取,若受力为多个工件的重力大小和,则同时抓取多个工件,放料,重新抓取,通过自检,能够保证每次都抓取单个工件,避免上空料或上料过多的情况,同时,通过设置抓取端包括与驱动组件的输出端相连接且相对设置的两个手指,两个手指之间形成一抓取间隙,以供抓取工件,手指均经由一快换组件与驱动组件的输出端可拆卸连接,便于更换手指,使整个抓取装置适用于不同的工件的抓取工作。
附图说明
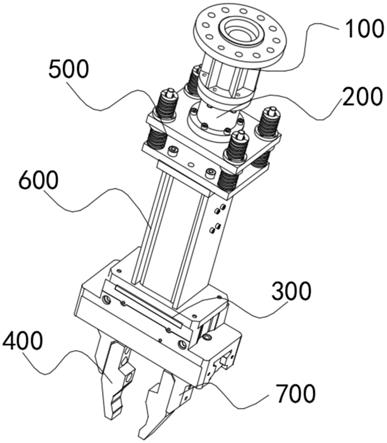
18.图1为本实用新型提供的一种具备自检功能的抓取装置本实施例中整体的结构示意图;
19.图2为本实用新型提供的一种具备自检功能的抓取装置本实施例中整体的爆炸图。
具体实施方式
20.下面结合附图来具体描述本实用新型的优选实施例,其中,附图构成本技术一部分,并与本实用新型的实施例一起用于阐释本实用新型的原理,并非用于限定本实用新型的范围。
21.如图1所示,本实施例中的一种具备自检功能的抓取装置,用于机器人,包括与机器人连接的自检组件200、具有一输出端的驱动组件300以及具有一抓取端的抓取组件400,驱动组件300的输出端与抓取端连接,以供驱动抓取端抓取工件。
22.本实施方案中的自检组件200是用于检测抓取组件400是否抓取到工件的结构。
23.本实施例中的自检组件200包括多维力传感器220,多维力传感器220与机器人连接,多维力传感器220的检测端与驱动组件300连接,以供根据受力检测抓取端是否抓取到工件。
24.其中,多维力传感器220的顶部固定连接有第一夹板210,第一夹板210经由连接法兰100与机器人连接,多维力传感器220的底端为检测端,检测端经由第二夹板230与驱动组件300连接。
25.为了增大抓手长度,保证最大角抓取时机器人在料框以外,防止触碰料框产生误报警,多维力传感器220的检测端经由一加长杆600与驱动组件300连接。
26.可以理解的是,多维力传感器220为本领域技术人员可以想到的能检测与其相连接的抓取端是否受力的装置,如可为三维力传感器,在此不再过多的阐述。
27.为了防止末端直接撞上工件,导致机器人碰撞报警,该装置还包括一缓冲组件500,三维传感器的输出端经由缓冲组件500与驱动组件300连接。
28.其中,如图2所示,缓冲组件500包括第一连接板510、第二连接板520以及弹性件,第一连接板510与多维力传感器220的输出端固定连接,第二连接板520与驱动组件300固定连接,第一连接板510和第二连接板520之间经由弹性件连接。
29.本实施例中的缓冲组件500采用双重缓冲结构,缓冲效果更好,具体的,弹性件的数量为多个,多个弹性件沿连接板的边缘周向均匀布置,弹性件均包括缓冲弹簧导杆、第一弹簧530、第二弹簧540、固定块,缓冲弹簧导杆的底端与第一连接板510固定连接,缓冲弹簧导杆的顶端穿过第二连接板520、并与固定块固定连接,第一弹簧530和第二弹簧540均设于缓冲弹簧导杆上,第一弹簧530的底端与第一连接板510抵接,第一弹簧530的顶端与第二连接板520抵接,第二弹簧540的底端与第二连接板520抵接,第二弹簧540的顶端与固定块抵接。
30.为了能使缓冲弹簧导杆能稳定滑动,本实施例中的第二连接板520上设置有圆孔,圆孔内安装有直线轴承,缓冲弹簧导杆的与直线轴承的内圈滑动连接。
31.为了是第一弹簧530和第二弹簧540受力均匀,本实施例中的第二连接板520的两侧均设置有垫片,垫片设于缓冲弹簧导杆上,两个垫片相对的一端与第二连接板520抵接,两个垫片相背的一端与第一弹簧530和/或第二弹簧540抵接。
32.为了能抓取不同尺寸、形状的工件,本实施例中的抓取端包括与驱动组件300的输出端相连接且相对设置的两个手指,两个手指之间形成一抓取间隙,以供抓取工件,手指均经由一快换组件700与驱动组件300的输出端可拆卸连接。
33.其中,快换组件700为一连接块,连接块固定设于驱动组件300的输出端上,连接块经由固定螺栓与手指可拆卸连接。
34.本实施例中的驱动组件300为平动两指气爪,平动两指气爪的两个输出端分别与两个手指连接,可以理解的是,也可以采用其他的结构代替,只要能够带动两个手指相对或相背运动即可。
35.工作流程:控制机器人带动抓取组件400移至料框中,使手指夹紧待抓取的工件,抓取后,提起一定高度,因为存在相邻工件干涉,工件被卡住,无法抓起的现象,可通过多维力传感器220上显示的受力,若受力等于单个工件的重力大小,则判断抓取成功,若受力为0则,则未抓取成功,重新抓取,若受力为多个工件的重力大小和,则同时抓取多个工件,放
料,重新抓取,通过自检,能够有效的抓取工件,实现上料的过程。
36.与现有技术相比:通过设置与机器人连接的自检组件200、具有一输出端的驱动组件300以及具有一抓取端的抓取组件400,驱动组件300的输出端与抓取端连接,以供驱动抓取端抓取工件,自检组件200包括多维力传感器220,多维力传感器220与机器人连接,多维力传感器220的检测端与驱动组件300连接,以供根据受力检测抓取端是否抓取到工件,若受力等于单个工件的重力大小,则判断抓取成功,若受力为0则,则未抓取成功,重新抓取,若受力为多个工件的重力大小和,则同时抓取多个工件,放料,重新抓取,通过自检,能够保证每次都抓取单个工件,避免上空料或上料过多的情况,同时,通过设置抓取端包括与驱动组件300的输出端相连接且相对设置的两个手指,两个手指之间形成一抓取间隙,以供抓取工件,手指均经由一快换组件700与驱动组件300的输出端可拆卸连接,便于更换手指,使整个抓取装置适用于不同的工件的抓取工作。
37.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。