1.本实用新型涉及机械手技术领域,尤其涉及一种装配机械手。
背景技术:
2.随着科技不断的发展,为了提高生产效率,也为了减轻人工的劳动强度,在工厂中会使用机械臂来代替人工搬运,在工业生产中,常常用到一种特定性重复动作的机械手,通常为微旋式,重复单一的动作,效率极高,但是在高效率的同时,也存在着一个明显的缺点,就是在需要进行摆动角度调整时十分困难,通常采用一些固定的机械联动结构完成的,进行调整就需要进行更换部件,调整困难。
技术实现要素:
3.本实用新型的目的是针对背景技术中存在的问题,提出一种能够便于进行摆动幅度调整的装配机械手。
4.本实用新型的技术方案:一种装配机械手,包括固定台以及转动连接在固定台上表面的伸缩组件,所述伸缩组件上固定套设有齿轮,所述齿轮的一侧设置有固定在固定台上的导向件,所述导向件上活动套设有与齿轮啮合传动的齿条,所述齿条的一端固定连接有摆动杆,所述固定台的下表面固定连接有步进电机,所述步进电机的输出轴贯穿固定台的下侧且通过连接块固定连接有调节机构,所述调节机构上设置有固定柱,所述摆动杆活动套设在固定柱上,所述伸缩组件的上端固定有摆臂,所述摆臂的下侧固定有气动伸缩杆,所述气动伸缩杆的下侧固定有机械吸盘手。
5.优选的,所述导向件上固定套设有位于齿条下侧的承接件,所述齿条上开设有供导向件滑动的滑动通槽,所述导向件位于滑动通槽内。
6.优选的,所述摆动杆的上表面开设有供固定柱滑动的运动通槽,所述固定柱位于运动通槽内。
7.优选的,所述伸缩组件包括转动连接在固定台上表面的套管,所述套管的内部插接有插杆,所述插接的上端与摆臂固定连接,所述套管上螺纹连接有与插杆相抵接的螺栓。
8.优选的,所述调节机构包括固定在连接块上的回形框,所述回形框的内部转动连接有螺纹杆,所述螺纹杆上螺纹连接有移动块,所述固定柱固定在移动块上。
9.与现有技术相比,本实用新型具有如下有益的技术效果:
10.通过摆动杆与固定柱的配和,将旋转运动转化为特定范围的往复移动,在通过齿条与齿轮的啮合传动作用,将往复运动转化为特定的往复角度旋转,进而实现高效率微旋运动;配和调节机构的调节作用,能够调节到适用于当前工作的摆动范围,进而提高机械手的工作适应能力。
附图说明
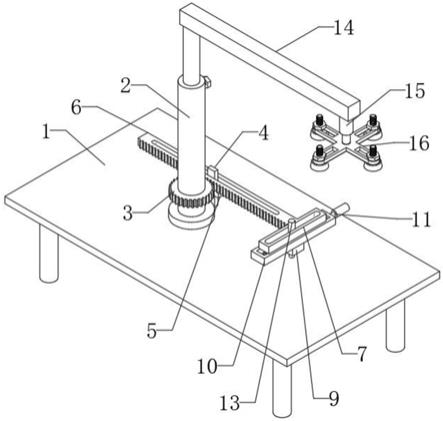
11.图1给出本实用新型一种实施例的结构示意图;
12.图2为图1的正视图;
13.图3为图1的俯视图。
14.附图标记:1、固定台;2、伸缩组件;3、齿轮;4、导向件;5、承接件;6、齿条;7、摆动杆;8、步进电机;9、连接块;10、回形框;11、螺纹杆;12、移动块;13、固定柱;14、摆臂;15、气动伸缩杆;16、机械吸盘手。
具体实施方式
15.下文结合附图和具体实施例对本实用新型的技术方案做进一步说明。
16.实施例一
17.如图1所示,本实用新型提出的一种装配机械手,包括固定台1以及转动连接在固定台1上表面的伸缩组件2,伸缩组件2通过轴承座与固定台1上表面转动连接,伸缩组件2上固定套设有齿轮3,齿轮3的一侧设置有固定在固定台1上的导向件4,导向件4为方杆或方板,本实施例中优先选用方板。导向件4上活动套设有与齿轮3啮合传动的齿条6,导向件4上固定套设有位于齿条6下侧的承接件5,承接件5可为任意形状的板状。齿条6上开设有供导向件4滑动的滑动通槽,导向件4位于滑动通槽内,齿条6的一端固定连接有摆动杆7,固定台1的下表面固定连接有步进电机8,步进电机8的输出轴贯穿固定台1的下侧且通过连接块9固定连接有调节机构,调节机构上设置有固定柱13,摆动杆7活动套设在固定柱13上,固定柱13优先选用圆杆。摆动杆7的上表面开设有供固定柱13滑动的运动通槽,固定柱13位于运动通槽内,伸缩组件2的上端固定有摆臂14,摆臂14的下侧固定有气动伸缩杆15,气动伸缩杆15的下侧固定有机械吸盘手16。
18.基于实施例一的工作原理是:使用时,将机械吸盘手16与外部供气设备连接,步进电机8接通电源并通过外部控制器启动,步进电机8的输出轴带动通过连接块9固定的调节机构,调节机构上设置的固定柱13发生转动,进而固定柱13在摆动杆7的运动通槽内滑动,进而使得齿条6在导向件4的导向作用下以及承接件5的承接作用下发生往复运动,进而使得齿条6与齿轮3之将啮合传动,进而伸缩组件2固定的摆臂14发生特定范围的摆动,进而通过外部控制器控制气动伸缩杆15,通过供气设备控制机械吸盘手16,进而能够实现特定范围的微旋运动,提高工作效率。
19.实施例二
20.如图1和图3所示,本实用新型提出的一种装配机械手,相较于实施例一,本实施例还包括:伸缩组件2包括转动连接在固定台1上表面的套管,套管的内部插接有插杆,插接的上端与摆臂14固定连接,伸缩组件2中的套管可为圆管或多边形管,且插杆的形状与套管相配合,本实施例中套管优先选用圆管,插杆优先选用圆杆。套管上螺纹连接有与插杆相抵接的螺栓。
21.基于实施例二的工作原理是:将螺栓拧松,然后将插杆与套管相移动,拧紧螺栓,即可完成长度调节,提高机械手的使用范围。
22.实施例三
23.如图1-3所示,本实用新型提出的一种装配机械手,相较于实施例一或实施例二,本实施例还包括:调节机构包括固定在连接块9上的回形框10,回形框10的内部转动连接有螺纹杆11,螺纹杆11的一端贯穿回形框10的内侧且固定连接有转动将,转动件可为手轮、把
手或摇轮,本实施例中优先选用把手。螺纹杆11上螺纹连接有移动块12,移动块12与回形框10的内壁相贴合,固定柱13固定在移动块12上。
24.基于实施例三的工作原理是:将把手转动,进而使得螺纹杆11与回形框10转动,进而螺纹杆11上螺纹连接的移动块12带动固定柱13移动,进而使得固定柱13的旋转半径发生变化,进一步提高了调节的便捷性。
25.上述具体实施例仅仅是本实用新型的几种优选的实施例,基于本实用新型的技术方案和上述实施例的相关启示,本领域技术人员可以对上述具体实施例做出多种替代性的改进和组合。
技术特征:
1.一种装配机械手,其特征在于,包括固定台(1)以及转动连接在固定台(1)上表面的伸缩组件(2),所述伸缩组件(2)上固定套设有齿轮(3),所述齿轮(3)的一侧设置有固定在固定台(1)上的导向件(4),所述导向件(4)上活动套设有与齿轮(3)啮合传动的齿条(6),所述齿条(6)的一端固定连接有摆动杆(7),所述固定台(1)的下表面固定连接有步进电机(8),所述步进电机(8)的输出轴贯穿固定台(1)的下侧且通过连接块(9)固定连接有调节机构,所述调节机构上设置有固定柱(13),所述摆动杆(7)活动套设在固定柱(13)上,所述伸缩组件(2)的上端固定有摆臂(14),所述摆臂(14)的下侧固定有气动伸缩杆(15),所述气动伸缩杆(15)的下侧固定有机械吸盘手(16)。2.根据权利要求1所述的一种装配机械手,其特征在于,所述导向件(4)上固定套设有位于齿条(6)下侧的承接件(5),所述齿条(6)上开设有供导向件(4)滑动的滑动通槽,所述导向件(4)位于滑动通槽内。3.根据权利要求1所述的一种装配机械手,其特征在于,所述摆动杆(7)的上表面开设有供固定柱(13)滑动的运动通槽,所述固定柱(13)位于运动通槽内。4.根据权利要求1所述的一种装配机械手,其特征在于,所述伸缩组件(2)包括转动连接在固定台(1)上表面的套管,所述套管的内部插接有插杆,所述插接的上端与摆臂(14)固定连接,所述套管上螺纹连接有与插杆相抵接的螺栓。5.根据权利要求1所述的一种装配机械手,其特征在于,所述调节机构包括固定在连接块(9)上的回形框(10),所述回形框(10)的内部转动连接有螺纹杆(11),所述螺纹杆(11)上螺纹连接有移动块(12),所述固定柱(13)固定在移动块(12)上。
技术总结
本实用新型涉及机械手技术领域,尤其涉及一种装配机械手。其技术方案包括:固定台以及转动连接在固定台上表面的伸缩组件,伸缩组件上固定套设有齿轮,齿轮的一侧设置有固定在固定台上的导向件,导向件上活动套设有与齿轮啮合传动的齿条,齿条的一端固定连接有摆动杆,固定台的下表面固定连接有步进电机,步进电机的输出轴贯穿固定台的下侧且通过连接块固定连接有调节机构,调节机构上设置有固定柱,摆动杆活动套设在固定柱上,伸缩组件的上端固定有摆臂,摆臂的下侧固定有气动伸缩杆,气动伸缩杆的下侧固定有机械吸盘手。本实用新型能够便于对机械手进行特定范围调节,提高机械手的适用范围。适用范围。适用范围。
技术研发人员:谢金华 杨应全 欧阳芳婷
受保护的技术使用者:广东思晨智能科技有限公司
技术研发日:2021.08.02
技术公布日:2022/1/28