1.本实用新型涉及机械手臂技术领域,尤其是指一种便捷式机械手臂。
背景技术:
2.近年来,我国基建事业的迅速发展让我国跃居世界前列的基建大国,而伴随着基建事业的迅猛发展,对于用功的需求也越来越高,在工程施工过程中,钢筋笼及施工区域内会有大量的碎石及饮料瓶,香烟盒等垃,如果不清除会对安全质量造成巨大影响,儿而这些垃圾需要耗费大量的人力来清理施工缝及钢筋笼间的垃圾及石块,通常由于空间位置限制狭小的问题,想要捡拾到各个角落的垃圾及石块,极其的不方便甚至会有一定危险性,然而目前工地绝大部分仍以让工人钻到钢筋笼内捡拾为主,或是攀爬到高处捡拾垃圾。人工捡拾的效率较低,劳动量大且工人的安全得不到保障,因此用机械装置捡拾垃圾有一定的市场需求且能极大的提高作业效率。
技术实现要素:
3.为此,本实用新型所要解决的技术问题在于克服现有技术中工程施工过程中位置限制的狭小空间内垃圾不方便清理的问题。
4.为解决上述技术问题,本实用新型提供了一种便捷式机械手臂,包括机械手机构、转动机构、传动机构和接收机构,所述机械手机构设置在转动机构上,所述转动机构设置在传动机构上,用于转动所述机械手机构,所述传动机构与所述机械手机构连接,用于控制机械手机构抓取物品,所述接收机构设置在传动机构一侧,用于收集机械手机构抓取的物品,所述机械手机构包括:
5.底座,所述底座设置在所述转动机构上,所述底座上设置支撑杆、转动杆和弹簧,所述转动杆一端与底座转动连接,另一端与所述传动机构连接,所述弹簧一端与底座连接,另一端与转动杆另一端连接;
6.机械手组件,所述机械手组件包括:固定爪和活动爪,所述固定爪和活动爪通过转轴转动连接,所述固定爪与所述支撑杆连接,所述活动爪与所述转动杆另一端连接。
7.在本实用新型的一个实施例中,所述转动机构包括双轴舵机。
8.在本实用新型的一个实施例中,传动连杆,所述传动连杆一端与所述转动机构连接,所述传动连杆上设置手轮,所述手轮通过连接线与所述转动杆另一端连接,通过手轮的收线放线实现机械手组件的抓起和放开两个动作。
9.在本实用新型的一个实施例中,所述传动连杆为伸缩式机械杆。
10.在本实用新型的一个实施例中,所述伸缩式机械杆包括两节套在一起的同心外管和内管组成,并由箍环连接,可实现伸缩式机械杆自由的伸缩和紧固。
11.在本实用新型的一个实施例中,所述的接收装置包括:收集管、固定架和收集袋,所述固定架设置在所述传动机构上,所述收集管通过固定架与所述传动机构连接,所述收集袋设置在所述收集管出口处,所收集管入口正对所述机械手组件。
12.在本实用新型的一个实施例中,所述固定架设置两组。
13.在本实用新型的一个实施例中,所述收集管外部为锡箔材质,内部粘有泡沫软垫。
14.在本实用新型的一个实施例中,所述收集袋与所述收集管可拆卸连接。
15.在本实用新型的一个实施例中,所述传动机构上还设置开关盒所述的开关盒,所述开关盒上设置开关,所述开关控制转动机构转动。
16.本实用新型的上述技术方案相比现有技术具有以下优点:
17.本实用新型所述的一种便捷式机械手臂,当拾取狭小空间内的垃圾等物品时,将机械手机构伸人狭小空间内,通过传动机构控制活动爪活动,实现固定爪和活动爪之间的闭合和张开,通过固定爪和活动爪之间的闭合和张开实现物品的抓取,通过转动机构可以改变机械手机构的方向,适用于不同角度的物品的拾取,收集装置可以使垃圾安稳的降落到收集袋中,可以直接对垃圾进行集中收集及处理使,解决了施工过程中位置限制的狭小空间内垃圾不方便清理的问题。
附图说明
18.为了使本实用新型的内容更容易被清楚的理解,下面根据本实用新型的具体实施例并结合附图,对本实用新型作进一步详细的说明,其中
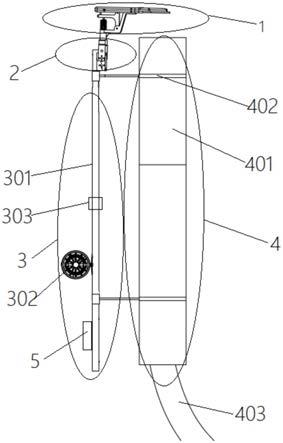
19.图1是本实用新型结构示意图;
20.图2是本实用新型机械手机构底座处的结构示意图;
21.图3是本实用新型机械手组件结构示意图。
22.说明书附图标记说明:1、机械手机构;2、转动机构;3、传动机构;4、接收机构;5、开关盒;101、底座;102、支撑杆;103、转动杆;104、弹簧;105、固定爪;106、活动爪;107、转轴;301、传动连杆;302、手轮;303、箍环;401、收集管;402、固定架;403、收集袋。
具体实施方式
23.下面结合附图和具体实施例对本实用新型作进一步说明,以使本领域的技术人员可以更好地理解本实用新型并能予以实施,但所举实施例不作为对本实用新型的限定。
24.参照图1-3所示,本实用新型的一种便捷式机械手臂,包括机械手机构1、转动机构2、传动机构3和接收机构4,所述机械手机构1设置在转动机构2上,所述转动机构2设置在传动机构3上,用于转动所述机械手机构1,所述传动机构3与所述机械手机构1连接,用于控制机械手机构1抓取物品,所述接收机构4设置在传动机构3一侧,用于收集机械手机构1抓取的物品,所述机械手机构1包括:
25.底座101,所述底座101设置在所述转动机构2上,所述底座101上设置支撑杆102、转动杆103和弹簧104,所述转动杆103一端与底座101转动连接,另一端与所述传动机构3连接,所述弹簧104一端与底座101连接,另一端与转动杆103另一端连接;
26.机械手组件,所述机械手组件包括:固定爪105和活动爪106,所述固定爪105和活动爪106通过转轴107转动连接,所述固定爪105与所述支撑杆102连接,所述活动爪106与所述转动杆103另一端连接。
27.其中,优选的,所述转动机构2包括双轴舵机。
28.当拾取狭小空间内的垃圾等物品时,将机械手机构1伸人狭小空间内,通过传动机
构3控制活动爪106绕着转轴107转动,实现固定爪105和活动爪106之间的闭合和张开,通过设置弹簧104可以使活动爪106自动闭合,通过固定爪105和活动爪106之间的闭合和张开实现物品的抓取,通过转动机构2的双轴舵机转动,可以改变机械手机构1的方向,适用于不同角度的物品的拾取,当抓取到物品后将机械手机构1转动到对准接收机构4的方向,传动机构3控制机械手组件松开物品,接收装置可以使垃圾安稳的降落到收集袋403中,可以直接对垃圾进行集中收集及处理使,该装置解决了施工过程中位置限制的狭小空间内垃圾不方便清理的问题,且结构小巧,方便携带。
29.其中,优选的,所述传动机构3包括:传动连杆301,所述传动连杆301一端与所述转动机构2连接,所述传动连杆301上设置手轮302,所述手轮302通过连接线与所述转动杆103另一端连接,通过手轮302的收线放线实现机械手组件的抓起和放开两个动作。
30.通过旋转手轮302,手轮302可以拉动连接线收线和放线,当收线时连接线拉动转动杆103转动,转动杆103带动活动爪106张开,当放线时弹簧104带动转动杆103转动,带动活动爪106与固定爪105闭合,该装置结构简单,方便操作,更具实用性。
31.其中,优选的,所述传动连杆301为伸缩式机械杆。
32.传动连杆301设置成伸缩式机械杆,可改变伸缩式机械杆的长度以适用于不同人群及不同空间部位。
33.其中,优选的,所述伸缩式机械杆包括两节套在一起的同心外管和内管组成,并由箍环303连接,可实现伸缩式机械杆自由的伸缩和紧固。
34.当伸缩式机械杆伸缩至需要的长度时,通过箍环303可以实现伸缩式机械杆长度的固定,该装置可以实现伸缩式机械杆自由的伸缩和紧固。
35.其中,优选的,所述的接收装置包括:收集管401、固定架402和收集袋403,所述固定架402设置在所述传动机构3上,所述收集管401通过固定架402与所述传动机构3连接,所述收集袋403设置在所述收集管401出口处,所收集管401入口正对所述机械手组件。
36.机械手机构1拾取到物品后,可以通过收集管401进入到收集袋403,收集袋403可以将垃圾起来。
37.其中,优选的,所述固定架402设置两组。
38.通过设置两组固定架402,可以使收集管401稳定的固定在传动机构3上,保证装置的稳定性。
39.其中,优选的,所述收集管401外部为锡箔材质,内部粘有泡沫软垫。
40.所述收集管401外部为锡箔材质,内部粘有泡沫软垫,可大大减小垃圾及石块下落的重力势能,便于对垃圾的集中收集,且提高装置的使用寿命。
41.其中,优选的,所述收集袋403与所述收集管401可拆卸连接。
42.当收集袋403收集满后,收集袋403可以从收集管401拆卸下来,方便更换收集袋403。
43.其中,优选的,所述传动机构3上还设置开关盒5所述的开关盒5,所述开关盒5上设置开关,所述开关控制转动机构2转动。
44.通过设置开关盒5,操作人员可以方便的控制转动机构2的转动。
45.显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变
动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本实用新型创造的保护范围之中。