1.本实用新型涉及工业机器人技术领域,特别是涉及一种便于调节的自动工业化机器人。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。工业机器人的常见形态是臂式的,它具有多节结构,所以可灵活移动。但也因为多节结构的灵活调节的特性,不方便进行校准定位调节。
3.因此,本领域技术人员提供了一种便于调节的自动工业化机器人,以解决上述背景技术中提出的问题。
技术实现要素:
4.本实用新型所要解决的技术问题是,克服现有技术的工业机器人不方便进行校准定位调节。
5.为了解决以上技术问题,本实用新型提供一种便于调节的自动工业化机器人,包括本体结构和定位件,所述本体结构包括底座、一号臂、二号臂、三号臂,所述底座呈长方体壳体结构,所述一号臂的底端固定在底座的顶壁中的轴承中,所述一号臂的顶部的前侧壁上固定有一个定位件、后侧壁上固定有二号电机,所述二号臂的底端与一号臂的顶端铰接,所述二号电机的转子端与二号臂连接,所述二号臂的顶端铰接有连接块,所述连接块的后侧壁上固定有三号电机、右侧壁上固定有四号电机,所述三号电机的转子与二号臂连接,所述二号臂的顶部的前端固定有一个定位件,所述三号臂的右部插入到连接块的通孔中,且右端与四号电机的转子连接;所述定位件的结构包括外壳、七号齿轮、三号角度位移传感器、二号定位杆、二号接近传感器,所述外壳呈圆柱体的壳体结构,所述七号齿轮设置在外壳的空腔的中部,所述七号齿轮的齿轮柱与二号臂或者连接块固定,所述三号角度位移传感器设置在外壳的空腔中,且转子端固定有八号齿轮,所述八号齿轮与七号齿轮啮合,所述二号定位杆的一端固定在齿轮柱上,所述二号接近传感器设置在外壳的壳内侧壁上。
6.作为本实用新型进一步的方案:所述连接块的左端固定有一个定位件,所述三号臂穿过外壳和七号齿轮的齿轮柱,并与齿轮柱固定,所述定位件检测三号臂的转动角度。
7.作为本实用新型进一步的方案:所述轴承的转子底端固定有锥形的一号齿轮,所述底座的前侧壁上固定有一号电机,所述一号电机的转子端探入到底座中,并固定有转轴,所述转轴内侧端固定有锥形的二号齿轮,所述二号齿轮与一号齿轮啮合,所述一号电机驱动二号齿轮转动,所述二号齿轮带动一号齿轮转动,使得轴承的转子带动一号臂水平转动。
8.作为本实用新型进一步的方案:所述底座的空腔中设置有一号角度位移传感器,所述一号角度位移传感器的转子端固定有四号齿轮,所述转轴上固定有三号齿轮,所述三
号齿轮与四号齿轮啮合,所述转轴带动三号齿轮转动,所述三号齿轮带动四号齿轮转动,使得一号角度位移传感器感应间接感应转轴的转动角度。
9.作为本实用新型进一步的方案:所述轴承的转子底端的中心部位固定有z型的一号定位杆,所述底座的空腔的底侧壁上设置有一号接近传感器,所述轴承的转子带动一号定位杆转动,使得一号定位杆的底端绕圆圈转动,当一号定位杆的底端转动至一号接近传感器的顶端时,一号接近传感器感应到一号定位杆的位置,以判断一号臂的水平角度,便于进行校准。
10.作为本实用新型进一步的方案:所述三号臂的左端固定有转头,所述转头的左端铰接有一个连接头,所述连接头与机械爪固定。
11.作为本实用新型进一步的方案:所述连接头的左侧壁的凹槽中设置有激光灯,所述激光灯便于确定连接头的朝向。
12.作为本实用新型进一步的方案:所述连接头与转头的铰接轴穿过转头、两端固定在连接头上,所述铰接轴上固定有五号齿轮,所述转头的空腔中设置有液压缸,所述液压缸的伸缩杆端固定有齿条,所述齿条与五号齿轮的底端啮合,所述液压缸伸缩后驱动齿条直线滑动,所述齿条带动五号齿轮转动,以驱动铰接轴转动。
13.作为本实用新型进一步的方案:所述转头的空腔中设置有二号角度位移传感器,所述二号角度位移传感器的转子端固定有六号齿轮,所述六号齿轮与齿条的端部啮合,所述齿条带动六号齿轮转动,使得二号角度位移传感器间接感应齿条的直线位移距离。
14.本实用新型的有益效果是:
15.(1)本实用新型设置定位件,当二号电机驱动二号臂绕着一号臂转动、三号电机驱动连接块绕着二号臂转动、四号电机驱动三号臂在连接块中转动时,带动定位件的七号齿轮转动,七号齿轮带动八号齿轮转动,三号角度位移传感器感应八号齿轮的转动角度,以计算出七号齿轮的转动角度,二号定位杆随着七号齿轮转动,当二号定位杆指向二号接近传感器时,二号接近开关感应到二号定位杆,以确定二号臂、或三号臂的实际角度。本实用新型方便调节机械臂的角度。
16.(2)本实用新型设置转头,液压缸伸缩后驱动齿条直线滑动,齿条带动五号齿轮转动,以驱动铰接轴转动,使得连接头绕着转头转动,使得机械抓转动;齿条移动时带动六号齿轮转动,使得二号角度位移传感器间接感应齿条的直线位移距离,以判断连接头的转动角度。本实用新型方便调节机械抓的角度。
附图说明
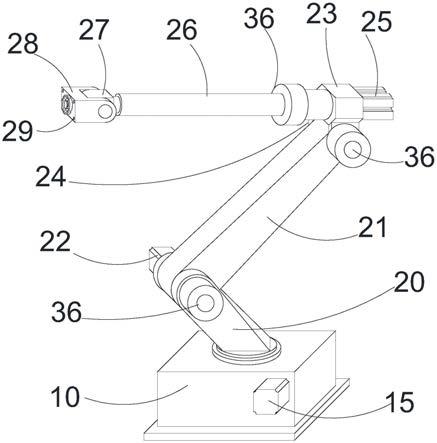
17.图1为本实用新型的立体图;
18.图2为底座的剖视图;
19.图3为定位件的剖视图;
20.图4为转头的剖视图。
21.其中:底座10、轴承11、一号齿轮12、一号定位杆13、一号接近传感器14、一号电机15、二号齿轮16、三号齿轮17、一号角度位移传感器18、四号齿轮19、一号臂20、二号臂21、二号电机22、连接块23、三号电机24、四号电机25、三号壁26、转头27、连接头28、激光灯29、铰接轴30、五号齿轮31、液压缸32、齿条33、二号角度位移传感器34、六号齿轮35、外壳36、七号
齿轮37、三号角度位移传感器38、八号齿轮39、二号定位杆40、二号接近传感器41。
具体实施方式
22.本实施例提供的一种便于调节的自动工业化机器人,结构如图1-4所示,包括本体结构和定位件,所述本体结构包括底座10、一号臂20、二号臂21、三号臂26,所述底座10呈长方体壳体结构,所述一号臂20的底端固定在底座10的顶壁中的轴承中,所述一号臂20的顶部的前侧壁上固定有一个定位件、后侧壁上固定有二号电机22,所述二号臂21的底端与一号臂20的顶端铰接,所述二号电机22的转子端与二号臂21连接,所述二号臂21的顶端铰接有连接块23,所述连接块23的后侧壁上固定有三号电机24、右侧壁上固定有四号电机25,所述三号电机24的转子与二号臂21连接,所述二号臂21的顶部的前端固定有一个定位件,所述三号臂26的右部插入到连接块23的通孔中,且右端与四号电机25的转子连接;所述定位件的结构包括外壳36、七号齿轮37、三号角度位移传感器38、二号定位杆40、二号接近传感器41,所述外壳36呈圆柱体的壳体结构,所述七号齿轮37设置在外壳36的空腔的中部,所述七号齿轮37的齿轮柱与二号臂21或者连接块23固定,所述三号角度位移传感器38设置在外壳36的空腔中,且转子端固定有八号齿轮39,所述八号齿轮39与七号齿轮37啮合,所述二号定位杆40的一端固定在齿轮柱上,所述二号接近传感器41设置在外壳36的壳内侧壁上。
23.所述连接块23的左端固定有一个定位件,所述三号臂26穿过外壳36和七号齿轮37的齿轮柱,并与齿轮柱固定,所述定位件检测三号臂26的转动角度。
24.所述轴承11的转子底端固定有锥形的一号齿轮12,所述底座10的前侧壁上固定有一号电机15,所述一号电机15的转子端探入到底座10中,并固定有转轴,所述转轴内侧端固定有锥形的二号齿轮16,所述二号齿轮16与一号齿轮12啮合,所述一号电机15驱动二号齿轮16转动,所述二号齿轮16带动一号齿轮12转动,使得轴承的转子带动一号臂20水平转动。
25.所述底座10的空腔中设置有一号角度位移传感器18,所述一号角度位移传感器18的转子端固定有四号齿轮19,所述转轴上固定有三号齿轮17,所述三号齿轮17与四号齿轮19啮合,所述转轴带动三号齿轮17转动,所述三号齿轮17带动四号齿轮19转动,使得一号角度位移传感器18感应间接感应转轴的转动角度。
26.所述轴承11的转子底端的中心部位固定有z型的一号定位杆13,所述底座10的空腔的底侧壁上设置有一号接近传感器14,所述轴承11的转子带动一号定位杆13转动,使得一号定位杆13的底端绕圆圈转动,当一号定位杆13的底端转动至一号接近传感器14的顶端时,一号接近传感器14感应到一号定位杆的位置,以判断一号臂20的水平角度,便于进行校准。
27.所述三号臂26的左端固定有转头27,所述转头27的左端铰接有一个连接头28,所述连接头28与机械爪固定。
28.所述连接头28的左侧壁的凹槽中设置有激光灯29,所述激光灯29便于确定连接头28的朝向。
29.所述连接头28与转头27的铰接轴30穿过转头27、两端固定在连接头28上,所述铰接轴30上固定有五号齿轮31,所述转头27的空腔中设置有液压缸32,所述液压缸32的伸缩杆端固定有齿条33,所述齿条33与五号齿轮31的底端啮合,所述液压缸32伸缩后驱动齿条33直线滑动,所述齿条33带动五号齿轮31转动,以驱动铰接轴30转动。
30.所述转头27的空腔中设置有二号角度位移传感器34,所述二号角度位移传感器34的转子端固定有六号齿轮35,所述六号齿轮35与齿条33的端部啮合,所述齿条33带动六号齿轮35转动,使得二号角度位移传感器34间接感应齿条33的直线位移距离。
31.本实用新型的工作原理:当二号电机22驱动二号臂21绕着一号臂20转动、三号电机24驱动连接块23绕着二号臂21转动、四号电机25驱动三号臂26在连接块23中转动时,带动定位件的七号齿轮37转动,七号齿轮37带动八号齿轮39转动,三号角度位移传感器38感应八号齿轮39的转动角度,以计算出七号齿轮37的转动角度,二号定位杆40随着七号齿轮37转动,当二号定位杆40指向二号接近传感器41时,二号接近开关41感应到二号定位杆40,以确定二号臂21、或三号臂26的实际角度;当改变机械抓的角度时,液压缸32伸缩后驱动齿条33直线滑动,齿条33带动五号齿轮31转动,以驱动铰接轴30转动,使得连接头28绕着转头27转动,使得机械抓转动;齿条33移动时带动六号齿轮35转动,使得二号角度位移传感器34间接感应齿条33的直线位移距离,以判断连接头28的转动角度。本实用新型方便进行角度调节和校准。
32.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
33.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。