1.本实用新型涉及食品、药品包装设备,尤其涉及一种巢板巢盒抓取装置及脱槽回巢机器人。
背景技术:
2.自动灯检机适用于制药企业对小容量导电液体异物和容器密封性检测,对于预充式注射器的自动化生产,要实现插满预充式注射器的巢板从巢盒中取出(也即脱巢)、空巢板放回巢盒(也即回巢)、以及巢盒自身的转运。现有的各类装置结构比较复杂、成本高且效率较低。
技术实现要素:
3.本实用新型要解决的技术问题是克服现有技术的不足,提供一种结构简单、成本低、使用方便的巢板巢盒抓取装置。
4.本实用新型进一步提供一种包含上述巢板巢盒抓取装置的脱槽回巢机器人。
5.为解决上述技术问题,本实用新型采用以下技术方案:
6.一种巢板巢盒抓取装置,包括可旋转的安装座,所述安装座边缘设有用于抓取巢板的真空吸盘,所述真空吸盘外侧设有用于抓取巢盒的卡钩。
7.作为上述技术方案的进一步改进:所述安装座为矩形结构且各侧边均设有至少一个所述真空吸盘,安装座各侧边均设有延伸部,所述延伸部上设有所述卡钩。
8.作为上述技术方案的进一步改进:所述卡钩与所述安装座对应的侧边之间具有夹角β,0
°
<β<90
°
。
9.作为上述技术方案的进一步改进:10
°
≤β≤20
°
。
10.作为上述技术方案的进一步改进:所述安装座上开设有多个通孔。
11.一种脱槽回巢机器人,包括可升降、平移、以及旋转的六轴机器人,还包括上述的巢板巢盒抓取装置,所述安装座与所述六轴机器人相连。
12.作为上述技术方案的进一步改进:所述安装座中部设有圆锥状的连接部,所述连接部与所述六轴机器人可拆卸连接。
13.与现有技术相比,本实用新型的优点在于:本实用新型公开的巢板巢盒抓取装置,在安装座边缘设有真空吸盘,对于插满预充式注射器的巢板,可以利用真空吸附固定巢板边缘,方便后续将巢板从巢盒中取出;安装座为可旋转结构并于真空吸盘外侧设有卡钩,可以通过旋转的方式使卡钩抓取巢盒的边缘部分,结构简单、成本低、使用非常方便。
14.本实用新型公开的脱槽回巢机器人,包括上述的巢板巢盒抓取装置,因而同样具有上述优点,通过六轴机器人带动安装座及其上的真空吸盘、卡钩整体升降、平移和旋转,能够有效地实现巢板与巢盒脱离、巢板放回巢盒及巢盒的转运。
附图说明
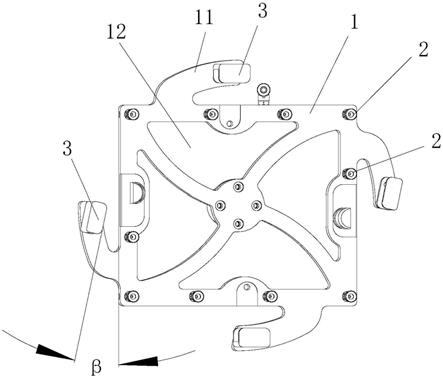
15.图1是本实用新型中巢板巢盒抓取装置的主视结构示意图。
16.图2是本实用新型中巢板巢盒抓取装置的立体结构示意图。
17.图3是本实用新型中脱槽回巢机器人第一视角的立体结构示意图。
18.图4是本实用新型中脱槽回巢机器人第二视角的立体结构示意图。
19.图中各标号表示:1、安装座;11、延伸部;12、通孔;13、连接部;2、真空吸盘;3、卡钩;4、六轴机器人;10、巢板;20、巢盒。
具体实施方式
20.以下结合说明书附图和具体实施例对本实用新型作进一步详细说明。
21.图1至图2示出了本实用新型巢板巢盒抓取装置的一种实施例,本实施例的巢板巢盒抓取装置,包括可旋转的安装座1,安装座1边缘设有用于抓取巢板10的真空吸盘2,真空吸盘2外侧设有用于抓取巢盒20的卡钩3。
22.该巢板巢盒抓取装置,在安装座1边缘设有真空吸盘2,对于插满预充式注射器的巢板10,可以利用真空吸附固定巢板10边缘,方便后续将巢板10从巢盒中取出,释放巢板10时,真空吸盘2停止吸附即可;安装座1为可旋转结构并于真空吸盘2外侧设有卡钩3,可以通过旋转的方式使卡钩3抓取巢盒20的边缘部分,释放巢盒20时,带动卡钩3反向旋转即可,结构简单、成本低、使用非常方便。
23.进一步地,本实施例中,安装座1为矩形结构且各侧边均设有至少一个真空吸盘2,安装座1各侧边均设有延伸部11,延伸部11上设有卡钩3。矩形结构的安装座1与巢板10、巢盒20上表面形状一致,安装座1各侧边分别设有真空吸盘2和卡钩3,保证可靠地抓取巢盒10、巢板20的各侧边。
24.进一步地,卡钩3与安装座1对应的侧边之间具有夹角β(例如安装座1的左侧边与左侧边上的卡钩3对应),0
°
<β<90
°
,也即卡钩3相对安装座1上对应的侧边倾斜布置,方便安装座1通过旋转带动卡钩3钩住巢盒20边缘下侧,或者方向旋转带动卡钩3与巢盒20分离,结构简单、可靠。
25.更进一步地,本实施例中,β=12
°
,可靠性好,抓取、释放巢盒20时所需转动的角度小,当然在其他实施例中,卡钩3的倾斜角度也可在10
°
至20
°
内进行调整。
26.进一步地,本实施例中,安装座1上开设有多个通孔12,一方面可以减轻安装座1的自重,另一方面方便通过通孔12观察抓取情况。
27.图3至图4示出了本实用新型脱槽回巢机器人的一种实施例,本实施例的脱槽回巢机器人,包括可升降、平移、以及旋转的六轴机器人4(例如沿z轴升降、沿x轴或y轴的平移、以及绕z轴的旋转),还包括上述的巢板巢盒抓取装置,安装座1与六轴机器人4相连。
28.该脱槽回巢机器人,包括上述的巢板巢盒抓取装置,因而同样具有上述优点,通过六轴机器人4带动安装座1及其上的真空吸盘2、卡钩3整体升降、平移和旋转,能够有效地实现巢板10与巢盒20脱离、巢板10放回巢盒20及巢盒20的转运。
29.进一步地,本实施例中,安装座1中部设有圆锥状的连接部13,连接部13与六轴机器人4可拆卸连接,安装座1与六轴机器人4之间的连接,结构简单、可靠,动作过程中的稳定性好,其中可以通过紧固件等实现可拆卸连接,方便更换不同规格的安装座1。
30.虽然本实用新型已以较佳实施例揭露如上,然而并非用以限定本实用新型。任何熟悉本领域的技术人员,在不脱离本实用新型技术方案范围的情况下,都可利用上述揭示的技术内容对本实用新型技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本实用新型技术方案的内容,依据本实用新型技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本实用新型技术方案保护的范围内。
技术特征:
1.一种巢板巢盒抓取装置,其特征在于:包括可旋转的安装座(1),所述安装座(1)边缘设有用于抓取巢板(10)的真空吸盘(2),所述真空吸盘(2)外侧设有用于抓取巢盒(20)的卡钩(3)。2.根据权利要求1所述的巢板巢盒抓取装置,其特征在于:所述安装座(1)为矩形结构且各侧边均设有至少一个所述真空吸盘(2),安装座(1)各侧边均设有延伸部(11),所述延伸部(11)上设有所述卡钩(3)。3.根据权利要求2所述的巢板巢盒抓取装置,其特征在于:所述卡钩(3)与所述安装座(1)对应的侧边之间具有夹角β,0
°
<β<90
°
。4.根据权利要求3所述的巢板巢盒抓取装置,其特征在于:10
°
≤β≤20
°
。5.根据权利要求2所述的巢板巢盒抓取装置,其特征在于:所述安装座(1)上开设有多个通孔(12)。6.一种脱槽回巢机器人,包括可升降、平移、以及旋转的六轴机器人(4),其特征在于:还包括权利要求1至5中任一项所述的巢板巢盒抓取装置,所述安装座(1)与所述六轴机器人(4)相连。7.根据权利要求6所述的脱槽回巢机器人,其特征在于:所述安装座(1)中部设有圆锥状的连接部(13),所述连接部(13)与所述六轴机器人(4)可拆卸连接。
技术总结
本实用新型公开了一种巢板巢盒抓取装置,包括可旋转的安装座,所述安装座边缘设有用于抓取巢板的真空吸盘,所述真空吸盘外侧设有用于抓取巢盒的卡钩。本实用新型进一步公开了一种脱槽回巢机器人,包括可升降、平移、以及旋转的六轴机器人,还包括上述的巢板巢盒抓取装置,所述安装座与所述六轴机器人相连。本实用新型具有结构简单、成本低、使用方便等优点。使用方便等优点。使用方便等优点。
技术研发人员:李伟
受保护的技术使用者:楚天科技股份有限公司
技术研发日:2021.08.16
技术公布日:2022/2/8