1.本实用新型主要涉及工业机械制造的技术领域,具体涉及轻负载智能机器人工件式清理装备。
背景技术:
2.伴随着科技的高速发展,人们对智能化,自动化的需求也越来越高,尤其是对工业机械制造领域,智能机器人已经逐步代替人工在恶劣的环境中作业,智能机器人相较人工而言不仅可以无视作业环境,而且作业的精度会更高,因此智能机器人已经得到了广泛应用。
3.现有技术中,针对工件的切削、磨削、倒孔等常用清理作业往往是依靠加工中心来实现,然而加工中心受限于多旋转轴及刀库的空间设计,十分占用空间,如若搭配桁架机器人,桁架所需使用长度过长,进一步提高了工厂的空间使用成本,且加工中心自身成本就很高,因此现在亟需一种即能自动化完成各种清理作业,又轻便小巧的清理装备。
技术实现要素:
4.本实用新型主要提供了轻负载智能机器人工件式清理装备,用以解决上述背景技术中提出的技术问题。
5.本实用新型解决上述技术问题采用的技术方案为:
6.轻负载智能机器人工件式清理装备,包括框架,其特征在于,还包括:多轴机器人,传动连接于所述框架顶部:1组力控制浮动磨削组件,用于去除工件外观拉痕;2组360度双角度径向力控制浮动组件,其中一组用于去除内腔侧壁曲面颗粒或段屑毛刺,另一组用于去除工件上的连续硬毛刺;2组360度单角度径向力控制浮动组件,其中一组用于去除外轮廓表面颗粒或段屑毛刺,另一组用于加工刀纹抛光;2组单角度轴向力控制组件,其中一组用于去除孔边毛刺或孔边缘倒角,另一组用于去除工件外曲面轮廓颗粒或段屑毛刺;以及1组刚性切屑组件,用于去除工件毛刺或多余残留;共8个组件中的一个或多个,所述多轴机器人在操控下夹持工件在其中的一个或多个组件上进行清理作业。
7.优选的,所述多轴机器人为六轴机器人。
8.优选的,还包括工件传送组件,所述工件传送组件包括支撑件和第一驱动件;所述第一驱动件固设于所述框架并位于所述多轴机器人下方;所述支撑件由所述第一驱动件驱动可沿直线移动。
9.优选的,所述第一驱动件是第一气缸。
10.优选的,所述第一驱动件两侧还设有直线导轨,所述直线导轨固设于所述框架,所述支撑件通过固定在底部的滑块活动连接于所述直线导轨。
11.优选的,所述框架外侧还可拆卸连接有包裹整体装置的保护壳;所述保护壳顶部设有开口连通内外;所述框架顶部可拆卸连接有第二驱动件,其输出端传动连接有滑板并控制所述滑板在所述开口处移动,从而控制所述开口对外开启或是关闭。
12.优选的,所述第二驱动件是第二气缸。
13.与现有技术相比,本实用新型的有益效果为:本实用新型依靠多轴机器人夹持待加工工件,在8个组件中的一个或多个上进行清理作业包括但不限于进行切削、磨削、倒孔等,8个组件可以根据实际情况自行搭配,整体装置自动化程度高,清理角度多样灵活,可用性高,且体积小巧成本低廉,配合顶部的开口以及桁架机器人组线可以实现单台成站,多台成线的灵活搭配。
14.以下将结合附图与具体的实施例对本实用新型进行详细的解释说明。
附图说明
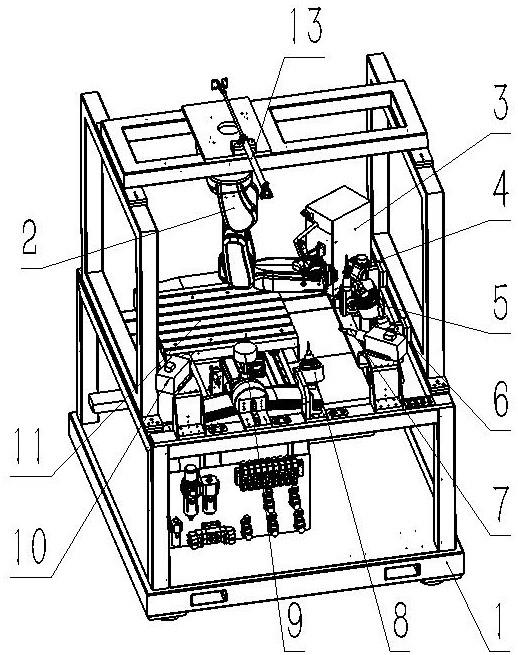
15.图1为本实用新型的整体结构内部轴侧示意图;
16.图2为本实用新型的8个组件结构示意图;
17.图3为本实用新型的工件传送组件结构示意图;
18.图4为本实用新型的外部结构轴侧示意图。
19.图中:1框架;
20.2多轴机器人;
21.3力控制浮动磨削组件;301安装架;
22.4第一360度单角度径向力控制浮动组件;401第一安装件;
23.5第一360度双角度径向力控制浮动组件;501第二安装件;
24.6第一单角度轴向力控制组件;601第三安装件;
25.7第二单角度轴向力控制组件;
26.8第二360度双角度径向力控制浮动组件;801第四安装件;
27.9第二360度单角度径向力控制浮动组件;901第五安装件;
28.10刚性切屑组件;1001第六安装件;
29.11工件传送组件;1101支撑件;1102第一驱动件;1103直线导轨;
30.12保护壳;1201开口;1202滑板;
31.13第二驱动件。
具体实施方式
32.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更加全面的描述,附图中给出了本实用新型的若干实施例,但是本实用新型可以通过不同的形式来实现,并不限于文本所描述的实施例,相反的,提供这些实施例是为了使对本实用新型公开的内容更加透彻全面。
33.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上也可以存在居中的元件,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件,本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
34.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常连接的含义相同,本文中在本实用新型的说明书中所使用的术语知识为了描述具体的实施例的目的,不是旨在于限制本实用新型,本文所使用的术语“及/或”包括
一个或多个相关的所列项目的任意的和所有的组合。
35.请着重参照附图1-3,本实用新型提供了轻负载智能机器人工件式清理装备,包括框架1和多轴机器人2,多轴机器人2传动连接于框架1顶部,多轴机器人2可在编程或是软件操控下按指定命令多角度自由转动,整体装备还包括以下8个组件中的一个或多个,具体8个组件如下:
36.力控制浮动磨削组件3,通过底部的安装架301可拆卸连接于框架1一侧,该组件用于去除工件1.2mm左右外观拉痕,使得工件表面顺滑,本实用新型对该组件具体结构、型号、原理等不作要求,能实现上述功能即可,具体的,其型号优选serw-bls-20-1000自补偿力控砂带机;
37.第一360度单角度径向力控制浮动组件4,通过一侧的第一安装件401可拆卸连接于框架1一侧,该组件用于去除工件外轮廓表面0.2mm以下颗粒或段屑毛刺,本实用新型对该组件具体结构、型号、原理等不作要求,能实现上述功能即可,具体的,其型号优选serw-xy-5-pcd;
38.第一360度双角度径向力控制浮动组件5,通过一侧的第二安装件501可拆卸连接于安装架301,该组件用于去除工件内腔侧壁曲面0.5mm以下颗粒或段屑毛刺,本实用新型对该组件具体结构、型号、原理等不作要求,能实现上述功能即可,具体的,其型号优选serw-gn-700b-qt;
39.第一单角度轴向力控制组件6,通过一侧的第三安装件601可拆卸连接于框架1上,该组件用于去除孔边毛刺或孔边缘倒角,本实用新型对该组件具体结构、型号、原理等不作要求,能实现上述功能即可,具体的,其型号优选pdl-14-serw-dka-14;
40.第二单角度轴向力控制组件7,可拆卸连接于第三安装件601,该组件用于去除工件外曲面轮廓0.5mm以下颗粒或段屑毛刺,本实用新型对该组件具体结构、型号、原理等不作要求,能实现上述功能即可,具体的,其型号优选serw-1.5kw-8mm;
41.第二360度双角度径向力控制浮动组件8,通过侧面的第四安装件801可拆卸连接于框架1,该组件用于去除1.5mm以下连续硬毛刺,本实用新型对该组件具体结构、型号、原理等不作要求,能实现上述功能即可,具体的,其型号优选serw-gn-700b-xzc;
42.第二360度单角度径向力控制浮动组件9,通过侧面的第五安装件901可拆卸连接于框架1,该组件用于加工0.06mm左右刀纹抛光平顺光滑,本实用新型对该组件具体结构、型号、原理等不作要求,能实现上述功能即可,具体的,其型号优选serw-xy-5-gsl;
43.刚性切屑组件10,通过底部的第六安装件1001可拆卸连接于框架1,该组件用于去除工件0.5-5mm毛刺或多余残留,本实用新型对该组件具体结构、型号、原理等不作要求,能实现上述功能即可,具体的,其型号优选serw-1.5kw-12x75;
44.整体装备包含上述提到的共8个组件中的一个或多个, 作业时,多轴机器人2夹持待加工工件,在8个组件中的一个或多个上进行清理作业包括但不限于进行切削、磨削、倒孔等,8个组件可以根据实际情况自行搭配,可用性高,且避免了整个刀库的设计,以及相关的移动轴的设计,使得整体装置自动化程度高,清理角度多样灵活的同时,体积小巧成本低廉,其体积相对传统加工中心大致能缩小三分之二,体积的缩小使得设备的布置可以更为紧凑,厂房单位面积的产出也可以得到提高,配合自身成本的降低,可以进一步在成本上占据绝对优势。
45.考虑到多轴机器人2的具体实现,在上述实施例的基础上,本实用新型再提供一个优选的技术方案,多轴机器人2为六轴机器人,其型号优选irs300-7-70ts5,额定负载为7kg,六轴机器人的选择结构紧凑,且能实现所需的360度径向多角度转动,完成所需指令。
46.考虑到待加工工件可以自动上新与替换,在上述实施例的基础上,本实用新型再提供一个优选的技术方案,还包括工件传送组件,工件传送组件11包括支撑件1101和第一驱动件1102,第一驱动件1102固设于框架1并位于多轴机器人2下方,支撑件1101由第一驱动件1102驱动可沿直线移动,待加工工件由对应的固定工装固定于支撑件1101上,作业时,第一驱动件1102驱动支撑件1101,进而带动待加工工件送入整体装备内,然后控制多轴机器人2夹取待加工工件,在8个组件中的一个或多个上进行清理作业,工件传送组件11的设计可以实现待加工工件的自动上新与替换,适于实用。
47.考虑到第一驱动件1102的具体实现,在上述实施例的基础上,本实用新型再提供一个优选的技术方案,第一驱动件1102是第一气缸,其型号优选sc50x350tcm1,气缸的选择结构简单,安全可靠且成本低,适于实用。
48.考虑到第一驱动件1102驱动支撑件1101时的稳定性,在上述实施例的基础上,本实用新型再提供一个优选的技术方案,第一驱动件1102两侧还设有直线导轨1103,直线导轨1103固设于框架1上,支撑件1101通过固定在底部的滑块活动连接于直线导轨1103,直线导轨1103型号优选hgh-20ca2r1000z0c,直线导轨1103的设计摩擦阻力小、负载大、安装方便且使用寿命长,适于实用。
49.考虑到整体装置还可以配合桁架机器人组线,在上述实施例的基础上,本实用新型再提供一个优选的技术方案,请着重参照附图4,框架1外侧还可拆卸连接有包裹整体装置的保护壳12,保护壳12顶部设有开口1201连通内外,框架1顶部可拆卸连接有第二驱动件13,其输出端传动连接有滑板1202并控制滑板1202在开口1201处移动,从而控制开口1201对外开启或是关闭,多个装置并排成线时,配合装置上方的桁架机器人可以实现待加工工件的自动上新与替换,考虑到整体装置体积上相比加工中心的优势,本实用新型多个装置并排成线置于厂房长度方向或是插入完整的作业流水线中均可,适于实用。
50.考虑到第二驱动件13的具体实现,在上述实施例的基础上,本实用新型再提供一个优选的技术方案,第二驱动件13是第二气缸,其型号优选ma25x350scalb,气缸的选择结构简单,安全可靠且成本低,适于实用。
51.上述结合附图对实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的这种非实质改进,或未经改进将实用新型的构思和技术方案直接应用于其他场合的,均在本实用新型的保护范围之内。