一种双y轴双z轴桁架机械手
技术领域
1.本实用新型涉及机械手的技术领域,更具体地说,是涉及一种双y轴双z轴桁架机械手。
背景技术:
2.桁架机械手是一种建立在直角x,y,z三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。然而,目前市面上的桁架机械手大多数都是单工位式的,即每次只能取一个料,无法实现双工位取料,这样的工作效率低下,不能满足企业的高速生产需求。因此,有必要发明一种双工位工作的桁架机械手。
技术实现要素:
3.本实用新型的目的在于克服现有技术中的上述缺陷,提供一种双y轴双z轴桁架机械手。
4.为实现上述目的,本实用新型提供了一种双y轴双z轴桁架机械手,包括y轴横梁、y轴移动座、y轴移动驱动装置、x轴横梁、x轴移动座、x轴移动驱动装置、z轴、z轴安装座、z轴移动驱动装置和夹持装置,所述y轴横梁设有两根,两根y轴横梁间隔布置,所述y轴移动座设有四个,所述y轴移动座分别通过y轴线性滑轨可滑动地安装在各自对应的y轴横梁上,所述y轴移动驱动装置设有四个并分别安装在各自对应的y轴移动座上,所述y轴移动驱动装置能够分别带动各自的y轴移动座沿着y轴方向移动,所述x轴横梁设有两根,所述x轴横梁的两端分别安装在相对应的两个y轴移动座上,所述x轴移动座设有两个,所述x轴移动座分别通过x轴线性滑轨可滑动地安装在各自对应的x轴横梁上,所述x轴移动驱动装置设有两个并分别安装在各自对应的x轴移动座上,所述x轴移动驱动装置能够分别带动各自的x轴移动座沿着x轴方向移动,所述z轴安装座设有两个并分别安装在各自对应的x轴移动座上,所述z轴设有两根并分别通过z轴线性滑轨与各自对应的z轴安装座的内部滑动连接,所述z轴移动驱动装置设有两个并分别安装在各自对应的z轴安装座上,所述z轴移动驱动装置分别与各自对应的z轴传动连接,所述z轴移动驱动装置能够带动各自的z轴上下移动,所述夹持装置设有两个并分别安装在各自对应的z轴的底部。
5.作为优选的实施方式,所述夹持装置包括安装板、夹持勾块和勾块平移驱动气缸,所述安装板安装在z轴的底部,所述勾块平移驱动气缸设有两个并分别安装在安装板的两侧,所述夹持勾块设有两个并分别通过安装块与各自对应的勾块平移驱动气缸的输出轴相连接,两个夹持勾块相错开,所述安装板的底部设有位于两个夹持勾块之间的线性滑轨连接块,所述夹持勾块分别通过其内侧设有的平移线性滑轨与线性滑轨连接块滑动连接。
6.作为优选的实施方式,所述y轴移动驱动装置包括y轴驱动电机和y轴驱动齿轮,所述y轴驱动电机安装在y轴移动座上,所述y轴驱动齿轮安装在y轴驱动电机的输出轴上,所述y轴驱动齿轮与安装在y轴横梁顶部的y轴齿条相啮合。
7.作为优选的实施方式,还包括支座,所述支座设有四个并分别安装在各自对应的y
轴横梁的两端底部。
8.作为优选的实施方式,还包括四个y轴延长轨道,每个支座上均设有升降板和升降驱动装置,所述升降板通过升降线性滑轨可升降地安装在支座上,所述升降驱动装置与升降板传动连接以带动其升降,所述升降板上设有旋转驱动装置,所述y轴延长轨道均包括y轴延长横梁、y轴延长滑轨和y轴延长齿条,所述旋转驱动装置与y轴延长横梁的底部一端传动连接,所述y轴延长滑轨和y轴延长齿条布置于y轴延长横梁的顶面上,所述升降驱动装置能够分别带动各自的y轴延长轨道升降,所述旋转驱动装置能够分别带动各自的y轴延长轨道旋转,从而使y轴延长轨道移动至y轴横梁的端部与y轴横梁相对接,或使y轴延长轨道移动至y轴横梁的端部下方并平行于x轴横梁布置以收纳起来。
9.作为优选的实施方式,所述旋转驱动装置包括旋转电机和减速机,所述减速机安装在升降板的底部,所述旋转电机安装在减速机上并与减速机的输入部位传动连接,所述减速机的输出部位与y轴延长横梁的底部一端相连接。
10.作为优选的实施方式,所述升降驱动装置设置为升降气缸,所述升降气缸朝上安装在支座的外壁上,所述升降气缸的输出轴与升降板的底部相连接。
11.作为优选的实施方式,所述x轴移动驱动装置包括x轴驱动电机和x轴驱动齿轮,所述x轴驱动电机安装在x轴移动座上,所述x轴驱动齿轮安装在x轴驱动电机的输出轴上,所述x轴驱动齿轮与安装在x轴横梁顶部的x轴齿条相啮合。
12.作为优选的实施方式,所述z轴移动驱动装置包括z轴驱动电机和z轴驱动齿轮,所述z轴驱动电机安装在z轴安装座上,所述z轴驱动齿轮安装在z轴驱动电机的输出轴上,所述z轴驱动齿轮与纵向安装在z轴上的z轴齿条相啮合。
13.作为优选的实施方式,所述z轴在x轴方向的有效移动行程为2800mm,在z轴方向的有效移动行程为1000mm,所述z轴的最大承重为80kg。
14.与现有技术相比,本实用新型的有益效果在于:
15.1、本实用新型的结构简单、新颖,设计合理,设置有双x轴和双z轴,可同时夹取两个料,从而实现桁架机械手的双工位取料,提高了生产效率,可满足企业的高速生产需求。
16.2、本实用新型还设有y轴延长轨道,y轴延长轨道可与y轴相对接,从而延长机械手的y轴移动行程,而在不需要使用y轴延长轨道时,y轴延长轨道可旋转升降后收纳起来,节省了机械手的占用空间。
附图说明
17.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
18.图1是本实用新型实施例一提供的一种双y轴双z轴桁架机械手的结构示意图;
19.图2是本实用新型实施例一提供的一种双y轴双z轴桁架机械手的y轴驱动部位的结构示意图;
20.图3是本实用新型实施例一提供的一种双y轴双z轴桁架机械手的x轴驱动部位的结构示意图;
21.图4是本实用新型实施例一提供的一种双y轴双z轴桁架机械手的z轴驱动部位的结构示意图;
22.图5是本实用新型实施例一提供的一种双y轴双z轴桁架机械手的夹持部位的结构示意图;
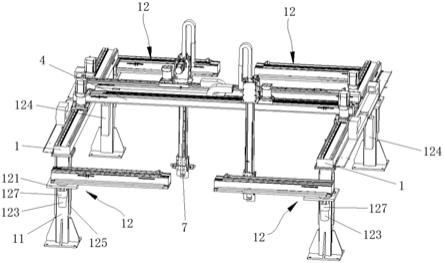
23.图6是本实用新型实施例二提供的另一种双y轴双z轴桁架机械手的结构示意图(y轴延长轨道收纳起来);
24.图7是本实用新型实施例二提供的另一种双y轴双z轴桁架机械手的结构示意图(y轴延长轨道与y轴相对接);
25.图8是本实用新型实施例二提供的另一种双y轴双z轴桁架机械手的y轴延长轨道部位的结构示意图。
具体实施方式
26.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.实施例一
28.请参考图1至图5,本实用新型的实施例提供了一种双y轴双z轴桁架机械手,包括支座11、y轴横梁1、y轴移动座2、y轴移动驱动装置3、x轴横梁4、x轴移动座5、x轴移动驱动装置6、z轴7、z轴安装座8、z轴移动驱动装置9和夹持装置10,下面将对各个组成部分的结构及其工作原理进行说明。
29.支座11设有四个,y轴横梁1设有两根并分别安装在同一侧的两个支座11的顶部,两根y轴横梁1间隔布置,y轴移动座2设有四个,y轴移动座2分别通过y轴线性滑轨21可滑动地安装在各自对应的y轴横梁1上,y轴移动驱动装置3设有四个并分别安装在各自对应的y轴移动座2上,y轴移动驱动装置3能够分别带动各自的y轴移动座2沿着y轴方向移动。
30.优选的,如图2所示,y轴移动驱动装置3可以包括y轴驱动电机31和y轴驱动齿轮32,y轴驱动电机31安装在y轴移动座2上,y轴驱动齿轮32安装在y轴驱动电机31的输出轴上,y轴驱动齿轮32与安装在y轴横梁1顶部的y轴齿条33相啮合。其中,y轴驱动电机31可以设置为台达公司生产的功率为1000w的减速一体电机。
31.x轴横梁4设有两根,每根x轴横梁4的两端分别安装在相对应的两个y轴移动座2上,x轴移动座5设有两个,x轴移动座5分别通过x轴线性滑轨51可滑动地安装在各自对应的x轴横梁4上,x轴移动驱动装置6设有两个并分别安装在各自对应的x轴移动座5上,x轴移动驱动装置6能够分别带动各自的x轴移动座5沿着x轴方向移动。
32.具体地,如图3所示,x轴移动驱动装置6可以包括x轴驱动电机61和x轴驱动齿轮62,x轴驱动电机61安装在x轴移动座5上,x轴驱动齿轮62安装在x轴驱动电机61的输出轴上,x轴驱动齿轮62与安装在x轴横梁4顶部的x轴齿条63相啮合。其中x轴驱动电机61可以设置为台达公司生产的功率为1000w的减速一体电机。
33.z轴安装座8设有两个并分别安装在各自对应的x轴移动座5上,z轴7设有两根并分
别通过z轴线性滑轨71与各自对应的z轴安装座8的内部滑动连接,z轴移动驱动装置9设有两个并分别安装在各自对应的z轴安装座8上,z轴移动驱动装置9分别与各自对应的z轴7传动连接,z轴移动驱动装置9能够带动各自的z轴7上下移动。
34.实施时,如图4所示,z轴移动驱动装置9可以包括z轴驱动电机91和z轴驱动齿轮92,z轴驱动电机91安装在z轴安装座8上,z轴驱动齿轮92安装在z轴驱动电机91的输出轴上,z轴驱动齿轮92与纵向安装在z轴7上的z轴齿条93相啮合。其中z轴驱动电机91可以设置为功率为750w的附带刹车的减速一体电机。
35.夹持装置10设有两个并分别安装在各自对应的z轴7的底部。
36.具体的,如图5所示,夹持装置10可以包括安装板101、夹持勾块102和勾块平移驱动气缸103,安装板101安装在z轴7的底部,勾块平移驱动气缸103设有两个并分别安装在安装板101的两侧,夹持勾块102设有两个并分别通过安装块104与各自对应的勾块平移驱动气缸103的输出轴相连接,两个夹持勾块102相错开,安装板101的底部设有位于两个夹持勾块102之间的线性滑轨连接块105,夹持勾块102分别通过其内侧设有的平移线性滑轨106与线性滑轨连接块105滑动连接。
37.优选的,z轴7在x轴方向的有效移动行程可以为2800mm,在z轴方向的有效移动行程可以为1000mm,z轴7的最大承重可以为80kg。
38.工作时,y轴移动驱动装置能够带动两个z轴上的夹持装置沿着y轴方向移动,x轴移动驱动装置能够带动两个夹持装置沿着x轴方向移动,z轴移动驱动装置能够带动两个夹持装置沿着z轴方向移动,从而实现两个夹持装置在x、y、z轴上移动,实现桁架机械手的双工位取料。
39.实施例二
40.请参考图6至图8,本实用新型的实施例二提供了另一种双y轴双z轴桁架机械手,包括支座11、y轴横梁1、y轴移动座2、y轴移动驱动装置3、x轴横梁4、x轴移动座5、x轴移动驱动装置6、z轴7、z轴安装座8、z轴移动驱动装置9、夹持装置10和y轴延长轨道12,其中,本实施例二的双y轴双z轴桁架机械手与上述实施例一的相同之处不再赘述,不同之处在于本实施例二在支座11上增设有用于延长y轴形成的y轴延长轨道12。
41.每个支座11上均设有升降板121和升降驱动装置,升降板121通过升降线性滑轨125可升降地安装在支座11上,升降驱动装置与升降板121传动连接以带动其升降。
42.优选的,升降驱动装置可以设置为升降气缸124,升降气缸124朝上安装在支座11的外壁上,升降气缸124的输出轴与升降板121的底部相连接。
43.升降板121上设有旋转驱动装置,y轴延长轨道12均包括y轴延长横梁122、y轴延长滑轨126和y轴延长齿条128,旋转驱动装置与y轴延长横梁122的底部一端传动连接,y轴延长滑轨126和y轴延长齿条128布置于y轴延长横梁122的顶面上。
44.具体而言,旋转驱动装置可以包括旋转电机123和减速机127,减速机127安装在升降板121的底部,旋转电机123安装在减速机127上并与减速机127的输入部位传动连接,减速机127的输出部位与y轴延长横梁122的底部一端相连接。
45.在需要延长机械手的y轴行程时,旋转驱动装置能够带动y轴延长轨道旋转,使y轴延长轨道旋转90度至与y轴横梁相平行,然后升降驱动装置能够带动y轴延长轨道上升,使y轴延长轨道上升至y轴横梁的端部并与y轴横梁相对接(如图7所示),此时y轴延长滑轨对接
y轴线性滑轨,y轴延长齿条对接y轴齿条,实现延长机械手的y轴行程,在不需要延长机械手的y轴行程时,升降驱动装置带动y轴延长轨道下降至y轴横梁的端部下方,然后旋转驱动装置带动y轴延长轨道旋转90度复位,使y轴延长轨道平行于x轴横梁布置以收纳起来(如图6所示)。
46.综上所述,本实用新型具有以下优点:
47.1、本实用新型的结构简单、新颖,设计合理,设置有双x轴和双z轴,可同时夹取两个料,从而实现桁架机械手的双工位取料,提高了生产效率,可满足企业的高速生产需求。
48.2、本实用新型还设有y轴延长轨道,y轴延长轨道可与y轴相对接,从而延长机械手的y轴移动行程,而在不需要使用y轴延长轨道时,y轴延长轨道可旋转升降后收纳起来,节省了机械手的占用空间。
49.上述实施例为本实用新型较佳的实施方式,但本实用新型的实施方式并不受上述实施例的限制,其他的任何未背离本实用新型的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本实用新型的保护范围之内。