1.本实用新型涉及一种太阳能光伏组件清洁设备,尤其涉及一种全地形自主移动太阳能光伏组件清洁机器人。
背景技术:
2.集中式大型地面光伏发电站在经历了井喷发展后,正面临转型,补贴力度逐年下降,平价发电成为新常态。通过提高现有电站的运维水平,提高每个光伏组件的发电效率,从而获得更高的资产回报率是电站业主的头等大事。
3.人工运维存在成本高、安全性低、地形适应能力差、无法24小时服务等缺点,以组件清洗任务为例:运维或外包人员无法在晚上无光条件下清洗,无法在地形复杂区域清洗,同时清洗成本难以下降。种种问题严重阻碍着发电效率的提升。根据统计数据,高频组件清洗可让平均发电效率提升5以上。按我公司每年发电10亿度计,高频组件清洗可使我公司每年多发5000万度电。
技术实现要素:
4.本实用新型为解决现有技术中存在的问题,提出了一种全地形自主移动太阳能光伏组件清洁机器人。
5.该机器人包括:位于底部驱动自身移动的全地形履带车,安装在全地形履带车上的关节清洗机械手,固定在全地形履带车上的储水箱;其中,全地形履带车中间部分为车架,主动轮固定连接在车架两端,主动轮下方设有从动支撑轮组,履带包裹在主动轮和从动支撑轮组的外圈。
6.进一步地,车架中部设有转台,关节清洗机械手安装在转台上的转盘上,便于关节清洗机械手向各方向转动。
7.进一步地,关节清洗机械手的末端设有喷水头。
8.进一步地,储水箱上部设有泵,泵的输入端与储水箱连接,泵输出端通过高压水管连接在喷水头上,将水箱内的水通过喷水头喷出。
9.进一步地,喷水头为t形结构,使喷出的清洗用水成“一”字形,适合于太阳能光伏组件清洗。
10.进一步地,喷水头的侧部设有连接在关节清洗机械手末端的工业相机,用于识别太阳能光伏组件的轮廓和边界。
11.进一步地,车架两侧设有激光雷达,用于控制小车与太阳能光伏组件之间的距离,同时对小车自身具有定位功能。
12.进一步地,从动支撑轮组上伸出一块弯板与主动轮在主动轮旋转平面上铰接,车架与从动支撑轮组通过连杆在垂于与全地形履带车移动方向的平面上铰接,从而构成独立悬架结构,使小车保持平稳移动。
13.本实用新型的技术效果在于:解决的光伏电站中太阳能光伏组件日常清洗维护问
题,基于光伏电站建立的三维点云地图,机器人通过激光雷达实现全地形小车在光伏电站内的无障碍移动,关节清洗机械手端部的工业相机具有视觉功能,能够判断识别周围的太阳能光伏组件是否需要进行清洗,并为识别出太阳能光伏组件的轮毂与边界,为喷水清洗提供依据。
附图说明
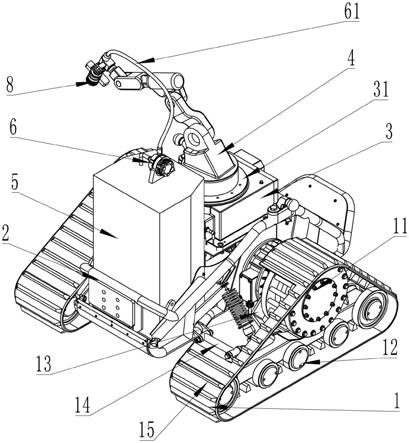
14.图1是本实用新型中机器人的轴测图;
15.图2是本实用新型中机器人的左视图。
16.图中,1.全地形履带车,2.车架,3.转台,31.转盘,4.关节清洗机械手,5.储水箱,6.泵,61.高压水管,7.喷水头,8.工业相机,9.激光雷达,11.主动轮,12.从动支撑轮组,13.弯板,14.连杆,15.履带。
具体实施方式
17.下面结合图1至图2对本实用新型的实施方式进行具体说明。
18.图1示意了机器人的整体结构,该机器人包括:位于底部驱动自身移动的全地形履带车1,安装在全地形履带车1上的关节清洗机械手4,固定在全地形履带车1上的储水箱5;全地形履带车1中间部分为车架2,主动轮11固定连接在车架2两端,主动轮11下方设有从动支撑轮组12,履带15包裹在主动轮11和从动支撑轮组12的外圈。
19.储水箱5上部设有泵6,泵6的输入端与储水箱5连接,泵6输出端通过高压水管61连接在喷水头7上;喷水头7的侧部设有连接在关节清洗机械手4末端的工业相机8;
20.从动支撑轮组12上伸出一块弯板13与主动轮11在主动轮11旋转平面上铰接,车架2与从动支撑轮组12通过连杆14在垂于与全地形履带车1移动方向的平面上铰接,从而构成独立悬架结构。
21.图2示意了关节清洗机械手4的安装方式,车架2中部设有转台3,关节清洗机械手4安装在转台3上的转盘31上,便于关节清洗机械手4向各方向转动;关节清洗机械手4的末端设有喷水头7,喷水头7为t形结构;车架2两侧设有激光雷达9,用于控制小车与太阳能光伏组件之间的距离。
22.工作原理:全地形履带车1上装载着储水箱5和关节清洗机械手4,基于三维点云地图,依靠激光雷达定位,在光伏电站内进行巡检,巡检时,关节清洗机械手4在转台3的控制下,转向巡检路径一侧的太阳能光伏组件,关节清洗机械手4末端的工业相机8通过视觉影像判断其看到的太阳能光伏组件是否需要进行清洗,若不需要,全地形履带车1继续巡检,弱需要,则通过工业相机8进一步识别需要清洗的太阳能光伏组件轮廓,并开启泵6,通过t形的喷水头7冲洗太阳能光伏组件表面,清洗时,全地形履带车1继续向前移动,完成一块太阳能光伏组件的清洗后,工业相机8识别出太阳能光伏组件已清洗干净,驱使全地形履带车1继续进入巡检模式,查找下一块需要检测太阳能光伏组件。
23.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型实施例
技术方案的范围。
技术特征:
1.一种全地形自主移动太阳能光伏组件清洁机器人,其特征在于,该机器人包括:位于底部驱动自身移动的全地形履带车(1),安装在全地形履带车(1)上的关节清洗机械手(4),固定在全地形履带车(1)上的储水箱(5);其中,全地形履带车(1)中间部分为车架(2),主动轮(11)固定连接在车架(2)两端,主动轮(11)下方设有从动支撑轮组(12),履带(15)包裹在主动轮(11)和从动支撑轮组(12)的外圈。2.根据权利要求1所述的全地形自主移动太阳能光伏组件清洁机器人,其特征在于,所述车架(2)中部设有转台(3),关节清洗机械手(4)安装在转台(3)上的转盘(31)上,便于关节清洗机械手(4)向各方向转动。3.根据权利要求1所述的全地形自主移动太阳能光伏组件清洁机器人,其特征在于,所述关节清洗机械手(4)的末端设有喷水头(7)。4.根据权利要求3所述的全地形自主移动太阳能光伏组件清洁机器人,其特征在于,所述储水箱(5)上部设有泵(6),泵(6)的输入端与储水箱(5)连接,泵(6)输出端通过高压水管(61)连接在喷水头(7)上。5.根据权利要求3所述的全地形自主移动太阳能光伏组件清洁机器人,其特征在于,所述喷水头(7)为t形结构。6.根据权利要求4所述的全地形自主移动太阳能光伏组件清洁机器人,其特征在于,所述喷水头(7)的侧部设有连接在关节清洗机械手(4)末端的工业相机(8)。7.根据权利要求5所述的全地形自主移动太阳能光伏组件清洁机器人,其特征在于,所述车架(2)两侧设有激光雷达(9),用于控制小车与太阳能光伏组件之间的距离。8.根据权利要求1所述的全地形自主移动太阳能光伏组件清洁机器人,其特征在于,所述从动支撑轮组(12)上伸出一块弯板(13)与主动轮(11)在主动轮(11)旋转平面上铰接,车架(2)与从动支撑轮组(12)通过连杆(14)在垂于与全地形履带车(1)移动方向的平面上铰接,从而构成独立悬架结构。
技术总结
本实用新型提供了一种全地形自主移动太阳能光伏组件清洁机器人,该机器人包括:位于底部驱动自身移动的全地形履带车,安装在全地形履带车上的关节清洗机械手,固定在全地形履带车上的储水箱;其中,全地形履带车中间部分为车架,主动轮固定连接在车架两端,主动轮下方设有从动支撑轮组,履带包裹在主动轮和从动支撑轮组的外圈,主要用于行走在光伏电站之间,对太阳能光伏组件进行清洗。对太阳能光伏组件进行清洗。对太阳能光伏组件进行清洗。
技术研发人员:杨彦勇 赵倩倩 徐向东 马小兰 王振国 李培金
受保护的技术使用者:中节能宁夏太阳能发电有限公司
技术研发日:2021.04.22
技术公布日:2022/2/11