1.本发明属于农业自动化设备领域,特别涉及一种农产品分拣机械臂。
背景技术:
[0002] 现阶段,农产品产后加工人工成本高昂,随着机器人技术的普及,机械臂开始广泛应用于农产品分拣作业中,中国专利号(202021731965 .5)公布了一种自动仓储用多功能分拣机械臂,能够有效提高物资分拣的准确性,并提高分拣搬运的工作效率,但在分拣过程中,对存在奇异点的分拣作业场景自适应性较差,因其底座设计自由度较少,在分拣过程中的灵活度较低。
技术实现要素:
本发明的目的旨在提供一种农产品分拣机械臂,以配合末端执行器完成自动夹取、分拣、放置农产品等连续性动作,灵活、精确、稳定、高效、大幅度节省人工成本。
[0003]
为解决上述技术问题,本发明提供一种农产品分拣机械臂,包括法兰联轴器,一字轴、u型转轴、第一臂组成前臂;十字万向轴、第二臂体、球笼式万向节组成后臂,其中球笼式万向节由前端螺纹杆球壳、钢球、球型槽、末端螺纹杆组成。
[0004]
进一步的,所述第一臂体顶端有所述法兰联轴器用于安装末端执行器。
[0005]
进一步的,所述法兰联轴器安装于所述一字轴上,所述一字轴两端与所述u型转轴相连接,并且所述u型转轴安装在所述第一臂体末端。
[0006]
进一步的,其特征在于,所述第一臂体和所述第二臂体之间通过所述十字万向轴相连接。
[0007]
进一步的,其特征在于,所述第二臂体末端通过所述前端螺纹杆与所述球笼式万向节连接,所述球笼式万向节通过所述球壳将所述钢球嵌入所述球型槽中,通过所述钢球在所述球型槽中运动实现所述球笼式万向节在多个自由度的运动,并通过所述后端螺纹杆安装在分拣机器上。
[0008]
由于采用上述方案,本发明的有益效果是:本发明是针对农产品产后加工自动化、智能化的实际需求所设计的一种农产品分拣机械臂,精简、紧凑、成本低,机械臂末端法兰联轴器可以连接末端执行器,实现能快速夹取分拣农产品并放置到指定位置的设计目的,机械臂底部的球笼式万向节可以使机械臂自由转动。本发明能有效地减少人工,有效提高了农产品产后加工的自动化能力,极大提升农产品分拣流水线的市场竞争性力。
附图说明
[0009]
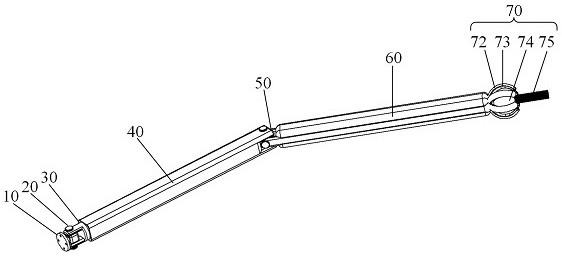
图1是本发明的机械臂整体结构图。
[0010]
图2是本发明的机械臂俯视图。
[0011]
图3是本发明的球笼式万向节结构图。
[0012]
图4是本发明的机械臂末端结构图。
[0013]
附图标记说明:10、法兰联轴器;20、一字轴;30、u型转轴;40、第一臂体;50、十字万
向轴;60、第二臂体;70、球笼式万向节;71、前端螺纹杆;72、球壳;73、钢球、74、球型槽;75、末端螺纹杆。
[0014]
具体实施方法在本发明的描述中,需要理解的是,涉及到方位描述,例如前端、末端、前、后等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0015]
在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相 连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接。可 以是机械连接,也可以是电连接。可以是直接相连,也可以通过中间媒介间接相连,可以是 两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以 根据具体情况理解上述术语在本申请中的具体含义。
[0016]
本发明的工作原理和使用方法如下,参考图1至图4,球笼式万向节70以末端螺纹杆75连接在分拣机器上,以电机驱动其转动,实现机械臂末端关节的自由运动,并因此驱动第二臂体60,其中,球笼式万向节70的球壳72将钢球73压入球型槽74中,使每个钢球73在对应槽内滚动,以带动球笼式万向节70组成的末端关节自由转动,第二臂体60和第一臂体40之间通过十字万向轴50连接,以电机驱动,使第一臂体40按指定轨迹运动,第一臂体40的末端安装有u型转轴30,通过电机控制,使u型转轴30可以带动机械臂末端做圆周运动,u型转轴30中间安装有一字轴20,一字轴20中间安装法兰联轴器10,在法兰联轴器10上可以搭载不同的末端执行器,由电机驱动,以实现末端执行器的灵活转动。
[0017]
本发明能够有效降低人力成本,传统分拣作业中通常采用人工分拣,采用分拣机械能够有效提高工厂自动化、智能化程度,显著分拣流水线分拣效率。
[0018]
上述的对实施例的描述是为便于该技术领域的普通技术人员能理解和应用本专利。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于这里的实施例,本领域技术人员根据本发明的揭示,不脱离本发明范畴所做出的改进和修改都应该在本发明的保护范围之内。
技术特征:
1.一种农产品分拣机械臂,包括法兰联轴器(10),一字轴(20)、u型转轴(30)、第一臂体(40)组成前臂;十字万向轴(50)、第二臂体(60)、球笼式万向节(70)组成后臂,其中球笼式万向节(70)由前端螺纹杆(71)、球壳(72)、钢球(73)、球型槽(74)、末端螺纹杆(75)组成。2.根据权利要求1所述的农产品分拣机械臂,其特征在于,所述第一臂体(40)顶端有所述法兰联轴器(10)用于安装末端执行器。3.根据权利要求1所述的农产品分拣机械臂,其特征在于,所述法兰联轴器(10)安装于所述一字轴(20)上,所述一字轴(20)两端与所述u型转轴(30)相连接,并且所述u型转轴(30)安装在所述第一臂体(40)末端。4.根据权利要求1所述的农产品分拣机械臂,其特征在于,所述第一臂体(40)和所述第二臂体(60)之间通过所述十字万向轴(50)相连接。5.根据权利要求1所述的机械臂,其特征在于,所述第二臂体(60)末端通过所述前端螺纹杆(71)与所述球笼式万向节(70)连接,所述球笼式万向节(70)通过所述球壳(72)将所述钢球(73)嵌入所述球型槽(74)中,通过所述钢球(73)在所述球型槽(74)中运动实现所述球笼式万向节(70)在多个自由度的运动,并通过所述后端螺纹杆(75)安装在分拣机器上。
技术总结
本发明提出了一种农产品分拣机械臂,包括法兰联轴器(10)、一字轴(20)、U型转轴(30)、第一臂体(40)、十字万向轴(50)、第二臂体(60)、球笼式万向节(70),本发明的机械臂第二臂体(60)末端连接有球笼式万向节(70)可以实现机械臂整体自由转动,第一臂体(40)末端连接有U型转轴(30)、一字轴(20)和法兰联轴器(10),有效提高末端执行器的灵敏度。本发明能有效降低人力成本,提高机械臂的自由度,同时提高农产品分拣流水线的分拣效率。拣流水线的分拣效率。拣流水线的分拣效率。
技术研发人员:杨旭海 周文皓 刘信君 李育峰 张茜 戚小琛 谭舒丹 何睿颖 马文宏
受保护的技术使用者:石河子市七合节能科技有限公司
技术研发日:2021.12.30
技术公布日:2022/2/11