1.本实用新型涉及移门的领域,尤其是涉及一种自动、手动双功能智能移门系统。
背景技术:
2.自动门是将人接近门的动作识别为开门信号的控制单元,通过驱动系统将门开启,在人离开后再将门自动关闭。
3.目前的自动门大多是以电机及控制器合成的一体机作为动力源,然后通过齿轮与同步带的配合实现传动,而同步带上的滑动组件带动门体发生移动从而实现启闭。
4.上述的一体机工作时需要通电,然而当发生意外情况而断电时,一体机就无法工作,门体无法开启,导致人员可能会被困在房屋内,存在明显不足。
技术实现要素:
5.为了改善因断电导致门板无法打开的问题,本技术提供一种自动、手动双功能智能移门系统。
6.本技术提供的一种自动、手动双功能智能移门系统采用如下的技术方案:
7.一种自动、手动双功能智能移门系统,包括矩形框架,所述矩形框架上滑移配合有朝向地面的滑动板,所述滑动板的底部开有缺口,所述门体上连接有安装耳,所述安装耳上铰接有转动臂,所述转动臂上螺纹连接有限位螺栓,所述限位螺栓的尾部延伸至缺口内。
8.通过采用上述技术方案,限位螺栓凭借其铰接处的摩擦,使其尾部位于缺口内。当一体机正常通电时,滑动板通过缺口带动限位螺栓移动,限位螺栓通过安装耳带动门体移动。当一体机意外断电时,使用者一手转动转动臂,转动臂将限位螺栓的尾部带出缺口,然后另一手推动门体移动。通过上述的方式,当一体机断电时,操作人员能够采用手动的方式实现门体的移动,从而减小了人员因一体机断电而受困的可能性。
9.可选的,所述转动臂上设有拉臂,所述拉臂的底部开有通孔,所述通孔内系有拉绳。
10.通过采用上述技术方案,拉绳的设置使得操作人员能够比较轻易的拉动转动臂转动,从而方便了实现手动移门。
11.可选的,所述安装耳的一侧设有固定板,所述固定板与安装耳之间螺纹连接有抵触螺栓和固定螺栓,所述固定螺栓上绕有扭簧,所述扭簧的一端抵触在抵触螺栓上,另一端抵触于限位螺栓的底部。
12.通过采用上述技术方案,在扭簧的推力作用下,能够确保一体机正常通电时,限位螺栓的尾部位于缺口内,从而减小因受其自身的重力作用而脱离缺口的可能性,有利于滑动板通过限位螺栓带动门体移动。
13.可选的,所述固定板与安装耳之间具有间距,所述转动臂远离其转动中心的一端位于固定板和安装耳之间。
14.通过采用上述技术方案,固定板对转动臂起保护作用,有利于减小滑动板通过限
位螺栓对转动臂施加作用力,转动臂发生弯曲形变的可能性。
15.可选的,所述安装耳上开有呈圆弧型的限位槽,所述限位槽与转动臂的转动中心同轴设置,所述限位螺栓的头部滑移在限位槽内。
16.通过采用上述技术方案,限位槽对限位螺栓的移动范围进行限定,确保扭簧始终能够对限位螺栓施加一定的推力。
17.可选的,所述矩形框架外设有一侧开口的防护罩,所述防护罩的两端均连接有防护端板,所述防护罩开口一侧的延边连接在墙体上。
18.通过采用上述技术方案,防护罩能够将矩形框架等部件包裹起来,以此不仅能够起到美观的作用,而且能够尽量减小灰尘进入矩形框架内,对滑动板的移动造成影响的可能性。
19.可选的,所述防护罩内腔顶面紧贴其开口一侧的位置设有安装条,所述矩形框架的外侧壁上开有供安装条嵌入的安装槽。
20.通过采用上述技术方案,安装条与矩形框架上的安装槽配合,对矩形框架位于防护罩内的安装位置实现定位,从而减小滑动板与门体之间的距离过大,导致限位螺栓的端部无法位于缺口内的可能性。
21.可选的,所述防护罩的底壁上开有视窗口。
22.通过采用上述技术方案,当限位螺栓的尾部位于缺口外时,人员通过视窗口,能够将限位螺栓的端部准确的移动至缺口内。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.当一体机断电时,操作人员能够采用手动的方式实现门体的移动,从而减小了人员因一体机断电而受困的可能性;
25.2.在扭簧的推力作用下,能够确保一体机正常通电时,限位螺栓的尾部能够位于缺口内,从而减小因受其自身的重力作用而脱离缺口的可能性,有利于滑动板通过限位螺栓带动门体移动。
附图说明
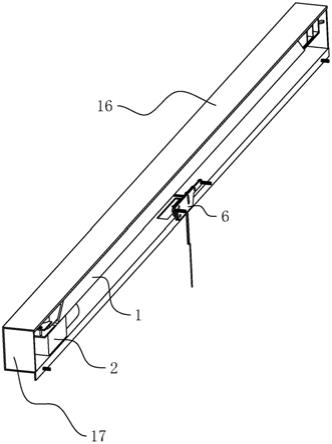
26.图1是用于体现本技术的结构示意图;
27.图2是用于体现本技术中防护罩、矩形框架、一体机之间连接关系的爆炸图;
28.图3是用于体现本技术中矩形框架、缺口、滑动板之间连接关系的结构示意图;
29.图4是用于体现本技术中视窗口、滑动板、安装耳之间连接关系的爆炸图;
30.图5是用于体现本技术中安装耳、转动臂、拉臂、固定板之间连接关系的爆炸图。
31.附图标记说明:1、矩形框架;101、安装槽;2、一体机;3、同步带;4、滑动板;41、缺口;5、支架;6、安装耳;61、限位槽;7、转动臂;8、限位螺栓;9、拉臂;10、通孔;11、拉绳;12、固定板;13、抵触螺栓;14、扭簧;15、固定螺栓;16、防护罩;17、防护端板;18、安装条;19、视窗口。
具体实施方式
32.以下结合附图1-5对本技术作进一步详细说明。
33.参照图1和图2,相关技术中的移门系统包括矩形框架1,矩形框架1的一端设有一
体机2,另一端设有从动齿轮,一体机2轴身上的主动齿轮与从动齿轮之间设有同步带3。
34.参照图2和图3,同步带3上设有滑移在矩形框架1内的滑动板4,滑动板4朝向地面。一体机2通电带动主动齿轮转动,主动齿轮通过同步带3带动从动齿轮转动,同步带3通过滑动板4带动门体移动。
35.本技术实施例公开一种自动、手动双功能智能移门系统。参照图2和图3,自动、手动双功能智能移门系统包括栓接在矩形框架1上的支架5,支架5与同步带3外侧壁相对主动齿轮的位置之间呈间隙设置。
36.间隙设置不仅使得主动齿轮带动同步带3运动时,同步带3不受支架5的摩擦影响。同时,由于间隙较小,因此能够减小同步带3与主动齿轮之间发生打滑而错齿的可能性。
37.参照图4和图5,滑动板4的底部开有缺口41,门体上栓接有安装耳6,安装耳6上铰接有转动臂7且铰接处的轴线垂直于门体的移动方向。
38.转动臂7上螺纹连接有限位螺栓8,限位螺栓8垂直于门体的移动方向,限位螺栓8的尾部延伸至缺口41内。
39.参照图3和图4,正常通电时,滑动板4通过缺口41带动限位螺栓8移动,限位螺栓8通过安装耳6带动门体移动,以此实现门体的自动启闭。
40.参照图4和图5,断电时,操作人员一手拉动转动臂7转动,转动臂7将限位螺栓8转出缺口41,然后另一手推动门体,门体同样能够实现启闭。
41.参照图2,通过上述的方式,当一体机2断电时,门体还是能够实现启闭,以此有利于减小人员因门体而受困的可能性。
42.参照图4和图5,由于安装耳6位于门体顶部的位置,高度较高,因此转动臂7上一体成型有拉臂9,拉臂9的底部开有通孔10,通孔10内系有拉绳11。拉绳11的设置使得人员能够更加方便的转动转动臂7。
43.参照图4和图5,安装耳6相对矩形框架1的一侧设有固定板12,固定板12与安装耳6之间螺纹连接有抵触螺栓13和固定螺栓15。固定螺栓15上绕有扭簧14,扭簧14的一端抵触在抵触螺栓13上,另一端抵触于限位螺栓8的底部。
44.通过扭簧14对限位螺栓8的推力作用,能够将限位螺栓8推回缺口41内,以此方便了对限位螺栓8实现复位。
45.同时,扭簧14对限位螺栓8的持续推力作用,能够确保正常通电时,限位螺栓8的尾部位于缺口41内,以免限位螺栓8自身的重力使其脱离缺口41的可能性。
46.参照图4和图5,固定板12与安装耳6之间具有间距,转动臂7远离其转动中心的一端位于固定板12和安装耳6之间。固定板12能够对转动臂7起保护作用,有利于减小限位螺栓8将滑动板4施加的推力传递至转动臂7上,导致转动臂7变形的可能性。
47.参照图4和图5,安装耳6上开有呈圆弧型的限位槽61,限位槽61与转动臂7的转动中心同轴设置,限位螺栓8的头部滑移在限位槽61内。通过限位槽61对限位螺栓8的移动范围进行限定,确保扭簧14始终能够对限位螺栓8施加一定的推力。
48.参照图2和图3,由于矩形框架1直接暴露在外界时,不仅使得房屋不够美观,同时灰尘容易对滑动板4的滑动产生影响。
49.参照图1和图2,为此,矩形框架1外栓接有一侧开口的防护罩16,防护罩16的两端均粘接有防护端板17,防护罩16开口一侧底部的延边栓接在墙体上。
50.参照图2和图3,通过防护罩16对矩形框架1实现防护,不仅使得整个移门系统更加的美观,同时能够尽量减小灰尘进入矩形框架1,从而对滑动板4的滑动产生影响的可能性。
51.参照图2和图4,防护罩16内腔顶面紧贴其开口一侧的位置一体成型有安装条18,矩形框架1的外侧壁上开有供安装条18嵌入的安装槽101。
52.通过安装条18和安装槽101的配合,实现对矩形框架1安装位置的定位。确保矩形框架1与安装耳6之间的距离足够小,使得限位螺栓8的尾部能够位于滑动板4上的缺口41内。
53.参照图2和图4,由于矩形框架1位于防护罩16内,人员无法直接观察到滑动板4的位置,以此难以准确的将限位螺栓8的尾部移动至缺口41内。
54.为此,防护罩16的底壁上开有视窗口19,人员通过一体机2将滑动板4移动至视窗口19的位置。同时,手动移动门体,从而将限位螺栓8移动至视窗口19的位置。人员通过视窗口19,能够将限位螺栓8的端部准确的移动至缺口41内。
55.本技术中的自动、手动双功能智能移门系统不仅能够适用于门体上,同样适用于窗体结构上,另外其他各种场合的平移式启闭的结构均能适用。
56.本技术实施例一种自动、手动双功能智能移门系统的实施原理为:
57.当一体机2正常通电时,滑动板4通过缺口41带动限位螺栓8移动,限位螺栓8通过安装耳6带动门体移动。当一体机2意外断电时,使用者一手拉动拉绳11,拉绳11通过拉臂9带动转动臂7转动,转动臂7将限位螺栓8的尾部带出缺口41,然后另一手能够推动门体移动。通过上述的方式,当一体机2断电时,操作人员能够采用手动的方式实现门体的移动,从而减小了人员因一体机2断电而受困的可能性。
58.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。