1.本发明涉及机械臂的运动控制领域,具体涉及一种机械臂的工作方法。
背景技术:
2.基于图像处理的智能机械臂是一个应用前景广阔的行业,以静态或动态目标以及机械臂为研究对象,通过采集和处理目标图像对目标进行识别定位,通过目标追踪获取目标运动状态并进行机械臂运动方程求逆解得到机械臂转角,实现目标抓取。其中,基于图像处理的智能机械臂技术是工业目标抓取、目标检测、制造自动化的核心技术;但是现有的控制方法中;控制机械臂向物品靠近时;需要对物品的三维坐标和机械臂的三维坐标进行分析;需要同时计算三个坐标之间的向量然后移动机械臂;这样计算复杂。
技术实现要素:
3.本发明提供一种计算简单的机械臂的工作方法为达到上述目的,本发明的技术方案是:一种机械臂的工作方法,其特征在于:通过机械臂实现,机械臂包括座体,在座体上设有转动装置;在转动装置上安装有夹持装置;夹持装置包括屈伸装置和夹持件;屈伸装置的一端与转动装置连接,屈伸装置的另一端与夹持件连接;屈伸装置包括第一屈伸支架、第二屈伸支架和第三屈伸支架;第一屈伸支架、第二屈伸支架和第三屈伸支架之间可相对活动;机械臂的工作方法,包括以下步骤:步骤(1).以座体为原点建立第一平面坐标系a;预设转动装置和第一屈伸支架铰接处与第一屈伸支架和第二屈伸支架节铰接处之间的距离l1;预设第一屈伸支架和第二屈伸支架铰接处与第二屈伸支架和第三屈伸支架铰接处之间的距离l2;预设第二屈伸支架和第三屈伸支架铰接处与夹持件之间的距离l3。
4.步骤(2).通过第一摄像装置获取物品的位置;转动装置驱动夹持装置转动使夹持装置的活动方向与物品对应。
5.步骤(3).以座体为原点,以机械臂物品为平面建立与第一平面坐标系a垂直的第二平面坐标系b。
6.步骤(4).确定第一坐标和第二坐标;第一坐标为物品在第二坐标系b中的坐标;第二坐标夹持件在第二坐标系b中能夹取物品的坐标。
7.步骤(5).通过第二摄像装置获取第一屈伸支架和第二屈伸支架铰接处与座体所在水平面在第二平面坐标系b中的高度距离y1;第二屈伸支架和第三屈伸支架铰接处与第一屈伸支架和第二屈伸支架铰接处在第二平面坐标系b中的高度距离y2;夹持件与第二屈伸支架和第三屈伸支架铰接处在第二平面坐标系b中的高度距离y3;通过勾股定理计算第一屈伸支架和第二屈伸支架铰接处与座体在第二平面坐标系b中的长度距离x1;第二屈伸支架和第三屈伸支架铰接处与第一屈伸支架和第二屈伸支架铰接处在第二平面坐标系b中长度距离x2;夹持件与第二屈伸支架和第三屈伸支架铰接处在第二平面坐标系b中长度距离x3;通过第二坐标(x,y)、公式x= x1+ x2+ x3;y= y1+ y 2+ y 3;cos θ1=x1/l1;cos (θ
1+
θ2)=x2/l2;cos (θ
1+
θ
2+
θ3)=x3/l3;计算θ1、θ2和θ3的角度;计算θ1、θ2和θ3的角度;以第一屈伸支架与水平面平行方向为始边,第一屈伸支架向上摆动为正方向;以第二屈伸支架与第一屈伸支架平行方向为始边,第二屈伸支架向上摆动为正方向;以第三屈伸支架与第二屈伸支架平行方向为始边,第三屈伸支架向上摆动为正方向;θ1为第一屈伸支架与底座所在水平面之间的夹角;θ2为第二屈伸支架与第一屈伸支架之间的夹角;θ3为第三屈伸支架与第二屈伸支架之间的夹角。
8.步骤(6).摆动第一屈伸支架、第二屈伸支架和第三屈伸支架;使第一屈伸支架与底座所在水平面之间的夹角为θ1;第二屈伸支架与第一屈伸支架之间的夹角为θ2;第三屈伸支架与第二屈伸支架之间的夹角为θ3;夹持件移动到第二坐标。
9.步骤(7).夹持件夹取物品;然后通过转动装置驱动夹持装置转动;带动物品转动到放置区域。
10.以上方法,通过转动装置驱动夹持装置的活动方向与物品对应;然后以夹持装置中线与物品中点构建第二平面坐标系b;第二平面坐标系b与第一平面坐标系a垂直;这样当夹持装置与物品处于同一平面时只需考虑x坐标和y坐标就能控制机械臂移动靠近物品;方法简单;通过x1、x2和x3计算第二坐标的x坐标;通过y1、y2和y3计算第二坐标的y坐标;然后计算出第一屈伸支架对应的摆动角度θ1;第二屈伸支架对应的摆动角度θ2;第三屈伸支架对应的摆动角度θ3。通过勾股定理和三角函数进行计算;方法简单通过确定第一屈伸支架、第二屈伸支架和第三屈伸支架的摆动正方向;这样能对θ1、θ2和θ3的正负数值进行区分;便于控制屈伸装置摆动。进一步的,转动装置包括转动舵机;转动舵机带动夹持装置转动;转动舵机连接有角度传感器。这样通过角度传感器能记录夹持装置的转动角度。
11.进一步的,步骤(1)还包括:以第一平面坐标系a中y轴为始边,顺时针转动为正方向;通过角度传感器记录夹持装置中线与第一平面坐标系a中y轴的夹角b的角度。
12.进一步的,步骤(2)具体为:以原点为起点,物品中点为终点构建第一延长线;通过第一摄像装置获取第一延长线与第一平面坐标系a中y轴的夹角a的角度;计算夹角a与夹角b之间的差值;转动舵机驱动夹持装置摆动;使夹持装置中线与第一延长线重合。
13.以上方法,通过夹持装置中线与第一延长线重合便于构建第二坐标系b。
14.进一步的,所述第一屈伸支架连接有第一驱动装置,第一屈伸支架通过第一驱动装置与转动装置连接;所述第二屈伸支架连接有第二驱动装置,第二屈伸支架通过第二驱动装置与第一屈伸支架连接;所述第三屈伸支架连接有第三驱动装置,第三屈伸支架通过第三驱动装置与第二屈伸支架连接;第一驱动装置、第二驱动装置和第三驱动装置都连接有角度传感器。
15.进一步的,所述步骤(1)还包括:以第一屈伸支架与水平面平行为初始状态设置第一屈伸支架与水平面之间的初始角度为0;以第二屈伸支架与第一屈伸支架平行为初始状态预设第二屈伸支架与第一屈伸支架之间的初始角度为0;以第三屈伸支架与第二屈伸支架平行为初始状态预设第三屈伸支架与第二屈伸支架之间的初始角度为0;通过角度传感器记录第一屈伸支架与水平面之间的当前角度、第二屈伸支架与第一屈伸支架之间的当前角、第三屈伸支架与第二屈伸支架之间的当前角度。
16.进一步的,步骤(6)具体为:计算第一屈伸支架与水平面之间的当前角度与θ1之间的差值;第一驱动装置驱动第一屈伸支架摆动;使第一屈伸支架与水平面之间的之间的角
度为θ1;计算第二屈伸支架与第一屈伸支架之间的当前角度与θ2之间的差值;第二驱动装置驱动第二屈伸支架摆动;使第二屈伸支架与第一屈伸支架面之间的之间的角度为θ2;计算第三屈伸支架与第二屈伸支架之间的当前角度与θ3之间的差值;第三驱动装置驱动第三屈伸支架摆动;使第三屈伸支架与第二屈伸支架面之间的之间的角度为θ3;夹持件移动到第二坐标。
附图说明
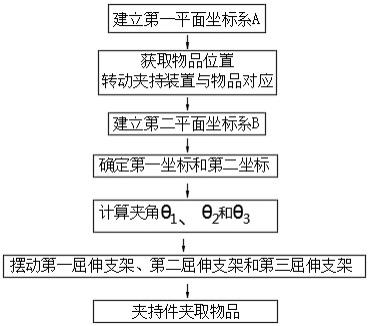
17.图1为本发明的流程图。
18.图2为夹持装置中线与第一延长线重合前的示意图。
19.图3为夹持装置中线与第一延长线重合后的示意图。
20.图4为夹持件移动到一第二坐标的示意图。
21.图5为夹持件移动到另一第二坐标的示意图。
22.图6为实现本发明的机械臂的示意图。
具体实施方式
23.下面结合附图和具体实施方式对本发明做进一步详细说明。
24.如图1-6所示;一种机械臂的工作方法,其特征在于:通过机械臂实现,机械臂用于夹持物品4。机械臂包括座体1,在座体1上设有转动装置2;在转动装置上安装有夹持装置3;转动装置包括转动舵机(图中未示出);转动舵机带动夹持装置3转动。夹持装置3包括屈伸装置和夹持件31;在本实施例中,转动装置2为回转驱动装置;夹持件31为抓手;转动装置2和夹持件31都是现有技术,在此不作累述。
25.屈伸装置的一端与转动装置2连接,屈伸装置的另一端与夹持件31连接;屈伸装置包括第一屈伸支架32、第二屈伸支架33和第三屈伸支架34;第一屈伸支架32、第二屈伸支架33和第三屈伸支架34之间可相对活动;所述第一屈伸支架32连接有第一驱动装置(图中未示出),第一屈伸支架通过第一驱动装置(图中未示出)与转动装置连接;所述第二屈伸支架33连接有第二驱动装置(图中未示出),第二屈伸支架通过第二驱动装置与第一屈伸支架连接;所述第三屈伸支架34连接有第三驱动装置(图中未示出),第三屈伸支架通过第三驱动装置与第二屈伸支架连接;转动舵机、第一驱动装置、第二驱动装置和第三驱动装置都连接有角度传感器。
26.机械臂的工作方法,包括以下步骤:步骤(1).以座体为原点建立第一平面坐标系a;预设转动装置和第一屈伸支架铰接处与第一屈伸支架和第二屈伸支架节铰接处之间的距离l1;预设第一屈伸支架和第二屈伸支架铰接处与第二屈伸支架和第三屈伸支架铰接处之间的距离l2;预设第二屈伸支架和第三屈伸支架铰接处与夹持件之间的距离l3。
27.以第一平面坐标系a中y轴为始边,顺时针转动为正方向;通过角度传感器记录夹持装置中线与第一平面坐标系a中y轴的夹角b的角度。
28.以第一屈伸支架与水平面平行为初始状态设置第一屈伸支架与水平面之间的初始角度为0;以第二屈伸支架与第一屈伸支架平行为初始状态预设第二屈伸支架与第一屈伸支架之间的初始角度为0;以第三屈伸支架与第二屈伸支架平行为初始状态预设第三屈
伸支架与第二屈伸支架之间的初始角度为0;通过角度传感器记录第一屈伸支架与水平面之间的当前角度、第二屈伸支架与第一屈伸支架之间的当前角、第三屈伸支架与第二屈伸支架之间的当前角度。
29.步骤(2).通过第一摄像装置获取物品的位置;转动装置驱动夹持装置转动使夹持装置的活动方向与物品对应。具体为:以原点为起点,物品中点为终点构建第一延长线;通过第一摄像装置获取第一延长线与第一平面坐标系a中y轴的夹角a的角度;计算夹角a与夹角b之间的差值;转动舵机驱动夹持装置摆动;使夹持装置中线与第一延长线重合。
30.步骤(3).以座体为原点,以机械臂物品为平面建立与第一平面坐标系a垂直的第二平面坐标系b。
31.步骤(4).确定第一坐标和第二坐标;第一坐标为物品在第二坐标系b中的坐标;第二坐标夹持件在第二坐标系b中能夹取物品的坐标。
32.步骤(5). 通过第二摄像装置获取第一屈伸支架和第二屈伸支架铰接处与座体所在水平面在第二平面坐标系b中的高度距离y1;第二屈伸支架和第三屈伸支架铰接处与第一屈伸支架和第二屈伸支架铰接处在第二平面坐标系b中的高度距离y2;夹持件与第二屈伸支架和第三屈伸支架铰接处在第二平面坐标系b中的高度距离y3;通过勾股定理计算第一屈伸支架和第二屈伸支架铰接处与座体在第二平面坐标系b中的长度距离x1;第二屈伸支架和第三屈伸支架铰接处与第一屈伸支架和第二屈伸支架铰接处在第二平面坐标系b中长度距离x2;夹持件与第二屈伸支架和第三屈伸支架铰接处在第二平面坐标系b中长度距离x3。在另一实施中,也可通过第二摄像直接装置获取x1、x2和x3的距离。
33.然后通过第二坐标(x,y)、公式x= x1+ x2+ x3;y= y1+ y 2+ y 3;cos θ1=x1/l1;cos (θ
1+
θ2)=x2/l2;cos (θ
1+
θ
2+
θ3)=x3/l3;计算θ1、θ2和θ3的角度;计算θ1、θ2和θ3的角度;以第一屈伸支架与水平面平行方向为始边,第一屈伸支架向上摆动为正方向;以第二屈伸支架与第一屈伸支架平行方向为始边,第二屈伸支架向上摆动为正方向;以第三屈伸支架与第二屈伸支架平行方向为始边,第三屈伸支架向上摆动为正方向;θ1为第一屈伸支架与底座所在水平面之间的夹角;θ2为第二屈伸支架与第一屈伸支架之间的夹角;θ3为第三屈伸支架与第二屈伸支架之间的夹角。
34.步骤(6). 计算第一屈伸支架与水平面之间的当前角度与θ1之间的差值;第一驱动装置驱动第一屈伸支架摆动;使第一屈伸支架与水平面之间的之间的角度为θ1;计算第二屈伸支架与第一屈伸支架之间的当前角度与θ2之间的差值;第二驱动装置驱动第二屈伸支架摆动;使第二屈伸支架与第一屈伸支架面之间的之间的角度为θ2;计算第三屈伸支架与第二屈伸支架之间的当前角度与θ3之间的差值;第三驱动装置驱动第三屈伸支架摆动;使第三屈伸支架与第二屈伸支架面之间的之间的角度为θ3;夹持件移动到第二坐标。
35.步骤(7).夹持件夹取物品;然后通过转动装置驱动夹持装置转动;带动物品转动到放置区域。
36.以上方法,通过转动装置驱动夹持装置的活动方向与物品对应;然后以夹持装置中线与物品中点构建第二平面坐标系b;第二平面坐标系b与第一平面坐标系a垂直;这样当夹持装置与物品处于同一平面时只需考虑x坐标和y坐标就能控制机械臂移动靠近物品;方法简单;通过x1、x2和x3计算第二坐标的x坐标;通过y1、y2和y3计算第二坐标的y坐标;然后计算出第一屈伸支架对应的摆动角度θ1;第二屈伸支架对应的摆动角度θ2;第三屈伸支架对
应的摆动角度θ3。通过勾股定理和三角函数进行计算;方法简单通过确定第一屈伸支架、第二屈伸支架和第三屈伸支架的摆动正方向;这样能对θ1、θ2和θ3的正负数值进行区分;便于控制屈伸装置摆动。进一步的,转动装置包括转动舵机;转动舵机带动夹持装置转动;转动舵机连接有角度传感器。这样通过角度传感器能记录夹持装置的转动角度。