1.本发明涉及制造业中机器人进行板材机械加工或者装配领域,具体是为机器人自动、快速、准确地抓取板材而设计研究的末端抓取机构。
背景技术:
2.在传统的板材机械加工、装配或者工位转移过程中,需要人工吊装、搬运,这种方式不仅费时费力,而且不利于板材保型,也影响板材加工或装配精度。
3.近年来随着机器人技术在制造业的快速推广,机器人设备被越来越多地应用于制造业,最常见的是在批量生产线上,机器人设备机械化地将某一固定类型零件从固定位置依照固定路径运送至固定目标位。若要更改其中某一要素,则需要重新进行机器人设备的软件设计或者程序设计。
4.针对生产中多变的板材加工需求,研制了一种用于机器人末端抓取不同形状板材的装置,此装置应用了机器人技术与视觉测量技术,可以识别不同类型的板材,于非固定位抓取板材,并且根据板材的所在位置与目标位置的关系,灵活选取运送路径,将板材保型运送至目标位置。
技术实现要素:
5.本发明提供了一种用于机器人末端抓取板材的抓取装置及使用方法此装置能准确且方便地抓取非固定形状的板材,将板材运转到指定位置,或者辅助操作人员将板材产品保持固定于在待加工或待装配产品的某一位置,以方便进行装配。
6.一种用于机器人末端抓取板材的抓取装置,其特征在于,所述的抓取装置包含主体框、气缸、防护爪、吸盘,所述的主体框的一端面板安装于机器人末端,两个防护爪分别铰接在主体框的两侧,每个防护爪的中部分别铰接在气缸的工作端,防护爪的开合受两个气缸的联动控制,所述的气缸装配在主体框的内部,所述主体框的另一端面板上安装有吸盘。
7.所述的抓取装置通过一个动力联接组件与机器人末端连接,该动力联动组件分别与视觉系统、位置检测系统和气动控制系统交联,所述的气缸受动力联接组件和气动控制系统控制。
8.所述的主体框的另一端面板上安装有四个吸盘,该吸盘与气动系统连接,气动系统连接受动力联接组件控制。
9.上述的用于机器人末端抓取板材的抓取装置的使用方法,其特征在于:1)将板材置于抓取装置的可控范围内;2)通过视觉系统和位置检测系统识别板材特征信息,获取板材几何坐标与机械坐标位置,将其反馈给机器人系统;3)机器人系统通过动力联接组件和气动系统控制气缸动作,气缸带动防护爪抓取板材,气动系统将吸盘抽真空,将板材吸附固定在吸盘上,达到板材在运转中稳定和保型的目的;4)机器人将板材运送到目标位置时,机器人系统通过动力联接组件和气动系统控制气缸动作,气缸带动防护爪松开板材,气动系统向吸盘内充气,解除吸盘对板材的吸附固定,实现板材的抓取运转目的。
10.本申请的有益效果在于:抓取装置的防护爪和吸盘受机器人的动力联接组件和气动系统控制,可以准确的实现对板材的抓取和吸附固定,并随机器人将板材移动到目标位置后,再进行释放,实现了在生产现场对板材的自动抓取和配送。
11.以下结合实施例附图对本申请做进一步详细描述。
附图说明
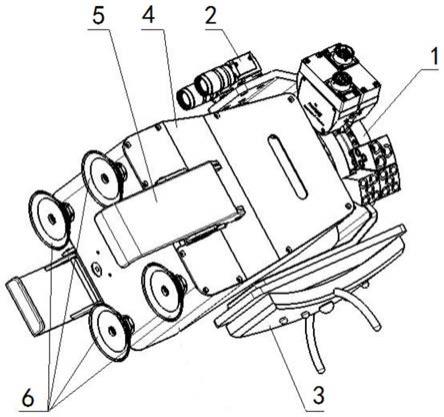
12.图1为抓取板材的抓取装置与机器人末端连接示意图。
13.图2为抓取板材的抓取装置结构示意图。
14.图3为抓取装置的主体框结构示意图。
15.图4为抓取装置的防护爪与气缸连接关系示意图。
16.图5为抓取板材的抓取装置使用状态示意图。
17.图中编号说明:1动力联接组件、2视觉系统、3位置检测系统、4主体框、5防护爪、6吸盘、7气缸、8后侧面板、9前侧面板、10斜撑、11铰轴、12板材。
具体实施方式
18.参见附图,本申请的用于机器人末端抓取板材的抓取装置,通过一个动力联接组件1与机器人末端连接,该动力联动组件1分别与视觉系统2、位置检测系统3和气动控制系统交联,如图1所示。
19.抓取板材的抓取装置包含主体框4、气缸7、防护爪5、吸盘6,如图2所示,所述的主体框的一端后侧面板8通过动力联接组件1安装于机器人末端,两个防护爪5分别铰接在主体框4的两侧,每个防护爪4的中部分别铰接在气缸7的工作端,每个防护爪4的尾部通过铰轴11与斜撑10的一端连接,斜撑10的另一端连接在气缸体上,所述的气缸7装配在主体框4的内部,防护爪5的开合受两个气缸7的联动控制,气缸7受动力联接组件1和气动控制系统控制;所述主体框4的另一端前侧面板9上安装有四个吸盘6,该吸,6与气动系统连接,气动系统连接受动力联接组件1控制。
20.上述的用于机器人末端抓取板材的抓取装置在使用时,必须将板材12置于抓取装置的可控范围内;通过视觉系统和位置检测系统识别板材特征信息,获取板材几何坐标与机械坐标位置,将其反馈给机器人系统;机器人系统通过位置标定法研究,以获得抓取基准点的位置坐标,和板材运送路径规划;机器人系统通过动力联接组件1和气动系统控制气缸7动作,气缸7带动防护爪4抓取板材12,气动系统将吸盘6抽真空,将板材12吸附固定在吸盘6上,如图5所示,达到板材在运转中稳定和保型的目的;板材12被抓取装置吸附固定后,机器人带动抓取装置将板材运送到目标位置,机器人系统再通过动力联接组件1和气动系统控制气缸7动作,气缸7带动防护爪4松开板材,气动系统向吸盘6内充气,解除吸盘6对板材12的吸附固定,实现板材12的抓取运转目的。
技术特征:
1.一种用于机器人末端抓取板材的抓取装置,其特征在于,所述的抓取装置包含主体框、气缸、防护爪、吸盘,所述的主体框的一端面板安装于机器人末端,两个防护爪分别铰接在主体框的两侧,每个防护爪的中部分别铰接在气缸的工作端,防护爪的开合受两个气缸的联动控制,所述的气缸装配在主体框的内部,所述主体框的另一端面板上安装有吸盘。2.如权利要求1所述的用于机器人末端抓取板材的抓取装置,其特征在于,所述的抓取装置通过一个动力联接组件与机器人末端连接,该动力联动组件分别与视觉系统、位置检测系统和气动控制系统交联,所述的气缸受动力联接组件和气动控制系统控制。3.如权利要求1所述的用于机器人末端抓取板材的抓取装置,其特征在于,所述的主体框的另一端面板上安装有四个吸盘,该吸盘与气动系统连接,气动系统连接受动力联接组件控制。4.如权利要求1或2或3所述的用于机器人末端抓取板材的抓取装置的使用方法,其特征在于:1)将板材置于抓取装置的可控范围内;2)通过视觉系统和位置检测系统识别板材特征信息,获取板材几何坐标与机械坐标位置,将其反馈给机器人系统;3)机器人系统通过动力联接组件和气动系统控制气缸动作,气缸带动防护爪抓取板材,气动系统将吸盘抽真空,将板材吸附固定在吸盘上,达到板材在运转中稳定和保型的目的;4)机器人将板材运送到目标位置时,机器人系统通过动力联接组件和气动系统控制气缸动作,气缸带动防护爪松开板材,气动系统向吸盘内充气,解除吸盘对板材的吸附固定,实现板材的抓取运转目的。
技术总结
一种用于机器人末端抓取板材的抓取装置及使用方法,此装置结构包含主体框、气缸、防护爪、吸盘,抓取装置通过一个动力联接组件与机器人末端连接,该动力联动组件分别与视觉系统、位置检测系统和气动控制系统交联,两个防护爪分别铰接在主体框的两侧,防护爪的开合受两个气缸的联动控制,吸盘连接在主体框的前侧面板上,机器人系统通过动力联接组件和气动系统控制气缸动作,气缸带动防护爪抓取板材,气动系统将吸盘抽真空,将板材吸附固定在吸盘上,达到板材在运转中稳定和保型的目的。达到板材在运转中稳定和保型的目的。达到板材在运转中稳定和保型的目的。
技术研发人员:杨翠 马鑫 毕瑜 侯宪法
受保护的技术使用者:中航西安飞机工业集团股份有限公司
技术研发日:2021.12.08
技术公布日:2022/2/11