1.本发明涉及轨道机器人领域,特别涉及一种高精度轨道机器人的轨道组件。
背景技术:
2.在发电站、变电站及输煤管廊等工作环境中,巡检工作是非常重要的一项日常任务,此项工作在很长时间内,都是全部由巡检员人工完成,这不仅是一项相当繁重的工作,也是一项具有危险性的工作。因此,近来,已有越来越多的企业,采用轨道机器人来执行巡检工作。目前,用于执行日常巡检的轨道机器人,是通过在管廊、变电站等场所铺设架空轨道,而后在轨道上部署巡检机器人,由于巡检机器人可根据工况灵活搭载高清摄像机及红外热成像仪,也可同时机器人配备有害气体、烟雾、光照度、温湿度等传感器以及定位装置和语音对讲系统等等,因此可大大简化巡检工作,使用户实时掌控巡检线路的信息。但是,目前常见的轨道机器人的轨道组件,大多由单个工字钢轨道构成,轨道机器人的行走机构沿轨道行走,随着运行时间的增加,磨损加重后,对于轨道机器人的在轨位置的定位是非常不利的。究其原因,最主要是行走机构在沿轨道行走时,方向性不佳,易于轨道发生不利的摩擦或碰撞。
技术实现要素:
3.鉴于现有技术存在的上述问题,本发明的一个方面的目的在于提供一种高精度轨道机器人的轨道组件,该轨道组件可使轨道机器人的行走机构在沿轨道行走时,保持较好的方向性,变相地降低磨损,提高定位精度。
4.为了实现上述目的,本发明一个方面提供的高精度轨道机器人的轨道组件,包括行走轨道和与所述行走轨道并列设置的导向轨道,所述行走轨道上挂载设置有作动部,所述作动部下方通过支撑杆悬挂设置有用于安装巡检用摄像头和/或传感器的安装基台,其中,所述作动部外侧设置有侧架,所述侧架上设置有滑杆,所述滑杆上设置有滑块,所述导向轨道构造为c字形轨道,所述滑块滑动适配于所述导向轨道内。
5.作为优选,所述行走轨道构造为工字型轨道。
6.作为优选,所述行走机构包括行走支架和设置在所述行走支架上的主动轮机构以及伺服电机,所述主动轮机构包括传动连接在所述伺服电机的输出端的主动轮轴,以及设置在所述主动轮轴上的主动轮。
7.作为优选,所述主动轮对设有两个,对应地,驱动两个所述主动轮的所述伺服电机设置有两个且由编码器同步。
8.作为优选,所述行走支架上还设置有两侧相对的从动轮机构,所述从动轮机构包括从动轮轴和设置在所述从动轮轴上的从动轮。
9.作为优选,所述行走支架上还设置有负重轮。
10.作为优选,所述行走支架上还设置有导向轮机构,所述导向轮机构包括导向轮轴和设置在所述导向轮轴上的导向轮。
11.作为优选,所述导向轨道的内侧壁,构造有多个滑槽,所述滑块的外侧构造有与所述滑槽匹配的凸棱。
12.本发明提供的高精度轨道机器人的轨道组件,通过设置导向轨道,可以对行走轨道上的行走机构的行进方向进行引导和约束,防止偏斜,变相降低零件磨损,从而提升工作过程中针对行走机构的定位精度。
附图说明
13.图1为本发明的高精度轨道机器人的轨道组件的立体结构示意图(包括作动部)。
14.图2为本发明的高精度轨道机器人的轨道组件的侧视结构示意图(包括作动部)。
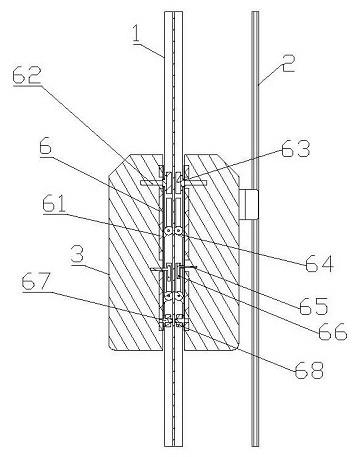
15.图3为图2中沿a-a向的剖面结构示意图。
16.图4为本发明的高精度轨道机器人的轨道组件的另一视角的结构示意图(包括作动部)。
17.图5为图4中沿b-b向的剖面结构示意图。
18.图中:1-行走轨道;2-导向轨道;3-作动部;4-支撑杆;5-安装基台;6-行走机构;11-第一滑槽;21-第二滑槽;31-侧架;32-滑杆;33-滑块;61-行走支架;62-主动轮轴;63-主动轮;64-负重轮;65-从动轮轴;66-从动轮;67-导向轮轴;68-导向轮。
具体实施方式
19.为使本领域技术人员更好的理解本发明的技术方案,下面结合附图和具体实施方式对本发明作详细说明。
20.此处参考附图描述本发明的各种方案以及特征。
21.通过下面参照附图对给定为非限制性实例的实施例的优选形式的描述,本发明的这些和其它特性将会变得显而易见。
22.还应当理解,尽管已经参照一些具体实例对本发明进行了描述,但本领域技术人员能够确定地实现本发明的很多其它等效形式,它们具有如权利要求所述的特征并因此都位于借此所限定的保护范围内。
23.当结合附图时,鉴于以下详细说明,本发明的上述和其他方面、特征和优势将变得更为显而易见。
24.如图1至图5所示,本发明一个实施例提供的高精度轨道机器人的轨道组件,包括行走轨道1和与所述行走轨道1并列设置的导向轨道2,所述行走轨道1上挂载设置有作动部3,所述作动部3下方通过支撑杆4悬挂设置有用于安装巡检用摄像头(图中未示出)和/或传感器(图中未示出)的安装基台5,具体地第,该巡检摄像头可选用基于双目视觉的防爆摄像头,根据其使用工况,也可搭配补光灯或适当智能调节功能的补光系统,以此适用更为复杂的巡检环境。而且,更进一步地,本发明的中,在提升轨道定位精度之后,摄像头可配合ai系统,对巡检路线上所采集的图像信息,进行智能识别,有利于巡检机器人提供更好的成像质量。在本发明这一实施例中,更进一步,所述作动部3外侧可设置有侧架31,所述侧架31上设置有滑杆32,所述滑杆32上设置有滑块33,所述导向轨道2构造为c字形轨道,该c字形轨道开口侧朝向所述行走轨道1一侧,所述滑块33可与c字形轨道的滑槽形成相对紧密的间隙配
合,滑动适配于所述导向轨道2内。当然,也可在所述导向轨道的内侧壁,构造有多个滑槽,所述滑块的外侧构造有与所述滑槽匹配的凸棱。如此一来,由于导向轨道2的约束,作动部3在行进过程中,不易发生侧向偏转,因此变相减小了磨损。同样也因此,在本发明中所述行走轨道1可构造为工字型轨道,与一般常见的行进轨道一致即可。但本领域技术人员应可理解,进一步对工字钢轨道进行改进,形成更便于行走机构沿既定路线行走的轨道结构,也可适用于本发明。
25.再者,如图3所示,具体地,在本发明中,所述行走机构6包括行走支架61和设置在所述行走支架61上的主动轮机构以及伺服电机,所述主动轮机构包括传动连接在所述伺服电机的输出端的主动轮轴62,以及设置在所述主动轮轴62上的主动轮63。并且,从附图3还可以看出,优选地,所述主动轮对设有两个,对应地,驱动两个所述主动轮的所述伺服电机设置有两个且由编码器同步。
26.为了提升行走的稳定性,在另一些改进方案中,如图3所示,所述行走支架61上还设置有两侧相对的从动轮机构,所述从动轮机构包括从动轮轴65和设置在所述从动轮轴65上的从动轮66。
27.更进一步地,所述行走支架61上还设置有负重轮64。同时,所述行走支架61上还设置有导向轮机构,所述导向轮机构包括导向轮轴67和设置在所述导向轮轴上的导向轮68。
28.以上实施例仅为本发明的示例性实施例,不用于限制本发明,本发明的保护范围由权利要求书限定。本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明的保护范围内。
技术特征:
1.高精度轨道机器人的轨道组件,包括行走轨道和与所述行走轨道并列设置的导向轨道,所述行走轨道上挂载设置有作动部,所述作动部下方通过支撑杆悬挂设置有用于安装巡检用摄像头和/或传感器的安装基台,其中,所述作动部外侧设置有侧架,所述侧架上设置有滑杆,所述滑杆上设置有滑块,所述导向轨道构造为c字形轨道,所述滑块滑动适配于所述导向轨道内。2.根据权利要求1所述的高精度轨道机器人的轨道组件,所述行走轨道构造为工字型轨道。3.根据权利要求1所述的高精度轨道机器人的轨道组件,所述行走机构包括行走支架和设置在所述行走支架上的主动轮机构以及伺服电机,所述主动轮机构包括传动连接在所述伺服电机的输出端的主动轮轴,以及设置在所述主动轮轴上的主动轮。4.根据权利要求3所述的高精度轨道机器人的轨道组件,所述主动轮对设有两个,对应地,驱动两个所述主动轮的所述伺服电机设置有两个且由编码器同步。5.根据权利要求3所述的高精度轨道机器人的轨道组件,所述行走支架上还设置有两侧相对的从动轮机构,所述从动轮机构包括从动轮轴和设置在所述从动轮轴上的从动轮。6.根据权利要求3所述的高精度轨道机器人的轨道组件,所述行走支架上还设置有负重轮。7.根据权利要求3所述的高精度轨道机器人的轨道组件,所述行走支架上还设置有导向轮机构,所述导向轮机构包括导向轮轴和设置在所述导向轮轴上的导向轮。8.根据权利要求1所述的高精度轨道机器人的轨道组件,所述导向轨道的内侧壁,构造有多个滑槽,所述滑块的外侧构造有与所述滑槽匹配的凸棱。
技术总结
本公开涉及一种高精度轨道机器人的轨道组件,包括行走轨道和与所述行走轨道并列设置的导向轨道,所述行走轨道上挂载设置有作动部,所述作动部下方通过支撑杆悬挂设置有用于安装巡检用摄像头和/或传感器的安装基台,其中,所述作动部外侧设置有侧架,所述侧架上设置有滑杆,所述滑杆上设置有滑块,所述导向轨道构造为C字形轨道,所述滑块滑动适配于所述导向轨道内。本发明提供的高精度轨道机器人的轨道组件,通过设置导向轨道,可以对行走轨道上的行走机构的行进方向进行引导和约束,防止偏斜,变相降低零件磨损,从而提升工作过程中针对行走机构的定位精度。针对行走机构的定位精度。针对行走机构的定位精度。
技术研发人员:孙晓刚 张浩 刘畅 苏睿之 孙新佳 杨俊祥
受保护的技术使用者:北京华能新锐控制技术有限公司
技术研发日:2021.11.21
技术公布日:2022/2/11