1.本发明涉及气动驱动器技术领域,具体涉及一种通用型主动径向柔顺恒力末端执行器及其工作方法。
背景技术:
2.目前我国工业机器人领域的企业大多将目光放在机械臂本体、定位技术和算法领域,但高效的动作执行无法仅仅依靠机械臂本身完成,末端执行器也就越来越成为了高灵巧度、高协作性机器人应用的重要部件。通用型驱动器作为工业机器人解决方案的重要部分,其作用是给末端工具提供动力和降低工作过程中的振动影响。通过工业机器人,不仅可以大幅度降低人工成本,将重复任务分配给工业机器人,从而提高制造效率和成本效益,更可针对性地解决研发过程中生产过程复杂、资源浪费等问题。
技术实现要素:
3.为解决目前工业机器人末端执行器仅仅针对某一特定工序而设计,会造成生产成本增加和设计难度加大等问题,本发明提供一种通用型主动径向柔顺恒力末端执行器,该驱动器集成气动马达、新型填充材料和六维力传感器,在保证驱动器输出恒力情况下,同时实现吸收气动马达和末端工具工作过程中产生的振动,保证工业机器人在工作过程中的稳定性和可靠性。
4.为实现上述目的,本发明采用以下技术方案:
5.一种通用型主动径向柔顺恒力末端执行器,其特征在于,包括机器人末端连接器、分层式驱动缸体、主动径向柔顺模块、末端工具及六维力传感器,所述机器人末端连接器与工业机器人末端连接,所述六维力传感器设置在机器人末端连接器与分层式驱动缸体之间,所述分层式驱动缸体下部与主动径向柔顺模块相连,所述主动径向柔顺模块下部与末端工具连接。
6.所述的一种通用型主动径向柔顺恒力末端执行器,其特征在于,所述机器人末端连接器包括机器人末端上连接块、机器人末端下连接块及减振材料层一,所述减振材料层一设置在机器人末端上连接块与机器人末端下连接块之间。
7.所述的一种通用型主动径向柔顺恒力末端执行器,其特征在于,所述分层式驱动缸体包括分层式驱动缸体上盖板,分层式上驱动外缸、气动马达、分层式下驱动外缸及分层式驱动缸体下盖板,所述分层式驱动缸体上盖板固定设置在分层式上驱动外缸上,所述分层式驱动缸体下盖板固定设置在分层式下驱动外缸上;所述分层式驱动缸体中盖板设置在分层式上驱动外缸与分层式下驱动外缸之间,所述气动马达设置在分层式下驱动外缸内,且固定在分层式驱动缸体中盖板底部。
8.所述的一种通用型主动径向柔顺恒力末端执行器,其特征在于,所述主动径向柔顺模块包括杆端关节轴承一、伺服电动缸、杆端关节轴承二、动盘、菱形轴承座、深沟球轴承、末端工具连接螺杆及高速万向节联轴器;其中伺服电动缸一端连接3个杆端关节轴承
一,另一端连接3个杆端关节轴承二,分层式驱动缸体下盖板与杆端关节轴承一固定连接,杆端关节轴承二与动盘固定连接;所述末端工具连接螺杆与气动马达使用高速万向节联轴器连接,所述动盘和菱形轴承座通过固定连接,所述末端工具连接螺杆底部与末端工具相连。
9.所述的一种通用型主动径向柔顺恒力末端执行器,其特征在于,所述分层式上驱动外缸与分层式驱动缸体中盖板之间设有减振材料层二。
10.所述的一种通用型主动径向柔顺恒力末端执行器,其特征在于,所述分层式驱动缸体下盖板与分层式下驱动外缸之间设有减振材料层三。
11.所述的一种通用型主动径向柔顺恒力末端执行器,其特征在于,所述分层式下驱动外缸内部在位于气动马达与分层式下驱动外缸内壁之间设置填充材料。
12.所述的一种通用型主动径向柔顺恒力末端执行器,其特征在于,所述末端工具采用打磨设备。
13.所述的一种通用型主动径向柔顺恒力末端执行器的工作方法,包括如下步骤:
14.1)上电后在机械臂上输入待加工的工件尺寸参数,并判断机械臂是否处于初始工作位置,如果未在初始位置,控制机械臂调整至初始位置,开启气动马达并靠近工件开始工作;
15.2)在x轴、y轴方向上,机械臂按初始速度匀速运行,进入力反馈子程序进行作业工作,最后判断是否完成;
16.3)在力反馈子程序中,首先通过六维力传感器采集末端工具的受力数据,其中包括分别沿着x轴、y轴和z轴的法向力,经过滤波处理后得到法向力f
x
、fy和fz;
17.4)判断fz是否在预设恒力工作的范围内,即f
zmin
<fz<f
zmax
,若fz小于最小值,说明此时正压力未达到设置恒力值,则控制机器人下降至经pid计算后的输出值δz;若fz大于最大值,则控制机器人上升至经pid计算后的输出值δz;判断f
x
、fy是否超过其所限定的最大值,若超过则说明此时工作阻力过大,应根据pid计算结果降低打磨速度及进给速度;其余状态保持上一时刻状态继续工作。
18.本发明的有益效果是:
19.1)该驱动器通过机器人末端连接器与工业机器人末端连接,机器人末端连接器与分层式驱动缸体之间连接有六维力传感器,分层式驱动缸体的末端可以与打磨、抛光、装配等各种末端工具连接,当末端工具与驱动器连接,新型驱动器可以给末端工具提供稳定的转速和转矩,使末端工具能够适应实际生产中各种复杂使用场景。
20.2)通过对主动径向柔顺模块的伺服电动缸的控制,能根据零件的外形和传感器测量的数据,实时调整末端执行器的末端工具的位置姿态,贴合曲面,提高工作效率,使得所机器人在作业过程中具有灵巧作业空间大、作业位置和作业姿态调整控制便捷、构型简单、经济性好。
21.3)该驱动器模块具有通用性,采用通用型驱动器可以降低机器人末端执行器的研发和生产成本,因为该驱动器可以连接各种末端工具,可以提高机器人末端执行器的灵活性,可应用于打磨、抛光和螺栓装配等。
22.4)在分层式驱动缸体中,缸体连接处中间采用新型减振材料隔开,可以避免气动马达和末端工具工作中产生的振动向工业机器人末端传递,同时还可以使驱动器有一定的
轴向浮动。在分层式下驱动缸体的气动马达与驱动缸体之间设置新型填充材料,吸收气动马达产生的振动,通过上述两种布置方式,可以降低末端执行器的振动,提高末端工具在工作过程中的稳定性和可靠性。
23.5)在驱动器中集成有六维力传感器,可以实时测量在末端执行器工作过程中的力和力矩,可以将测量数据实时传输给机器人控制系统,使末端工具在工作过程中保持恒力。
附图说明
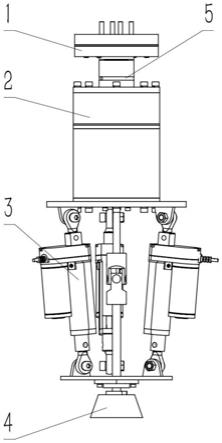
24.图1为本发明的总体结构示意图;
25.图2为本发明的机器人连接器示意图;
26.图3为本发明驱动器分层式驱动缸体的结构示意图;
27.图4为本发明主动径向柔顺模块结构示意图;
28.图5为本发明末端执行器的控制流程图。
29.图中:1为机器人末端连接器,2为气动驱动模块,3为主动径向柔顺模块,4为末端工具,5为六维力传感器;11、机器人末端上连接块;12、机器末端下连接块;13、减振材料层一;21、分层式驱动缸体上盖板;22、长螺栓;23、减振材料层二;24、分层式下驱动外缸;25、填充材料;26、气动马达;27、分层式驱动缸体下盖板;28、减振材料层三;29、分层式驱动缸体中盖板;210、分层式上驱动外缸;31、杆端关节轴承一,32为伺服电动缸,33、杆端关节轴承二;34、动盘;35、菱形轴承座;36、深沟球轴承;37、末端工具连接螺杆;38、高速万向节联轴器。
具体实施方式
30.以下结合说明书附图,对本发明作进一步描述。
31.如图1-5所示,一种通用型主动径向柔顺恒力末端执行器,包括机器人末端连接器1、分层式驱动器缸体2、末端工具连接器3、六维力传感器4、机器人末端上连接块11、机器末端下连接块12、减振材料层一13、分层式驱动缸体上盖板21、长螺栓22、减振材料层二23、分层式下驱动外缸24、填充材料25、气动马达26、分层式驱动缸体下盖板27、减振材料层三28、分层式驱动缸体中盖板29及分层式上驱动外缸210、杆端关节轴承一31、伺服电动缸32、杆端关节轴承二33、动盘34、菱形轴承座35、深沟球轴承36、末端工具连接螺杆37及高速万向节联轴器38。
32.机器人末端连接器1与工业机器人末端用4颗m6的螺栓连接。机器人末端连接器1与六维力传感器4上部用m4螺栓连接,六维力传感器4下部与分层式驱动缸体2使用m4螺栓连接,分层式驱动缸体2下部与末端工具连接器3采用m4螺栓连接,末端工具连接器3下部可以连接各种末端工具。
33.机器人末端连接器1,主要由机器人末端上连接块11、机器人末端下连接块12及减振材料层一13组成,减振材料层一13可以降低末端工具在工作过程中产生的振动,三个零件按照装配要求使用4颗m6螺栓连接,使用机器人末端连接器1可以实现将驱动器与工业机器人末端紧密连接。
34.通用型恒力柔性气动驱动器的核心部分为分层式驱动缸体2,分层式驱动缸体2主要由分层式驱动缸体上盖板21、长螺栓22(m6x75)、减振材料层二23、分层式下驱动外缸24、
填充材料25、气动马达26、分层式驱动缸体下盖板27、减振材料层三28、分层式驱动缸体中盖板29及分层式上驱动外缸210。分层式驱动缸体上盖板21上部与六维力传感器4采用6颗m4连接,分层式驱动缸体上盖板21、分层式上驱动外缸210、减振材料层二23、分层式驱动缸体中盖板29和分层式下驱动外缸24使用8颗长螺栓22(m6x75)依次连接。在分层式驱动缸体上盖板21和分层式驱动缸体下盖板27中间采用分层式驱动缸体中盖板29隔开,分层式驱动缸体2上部是给气动马达便于排气和气动马达26的气源管道的通道。防止下部的具有一定流动性的填充材料25进入上部和便于装配和后期拆装与维修。
35.填充材料25与气动马达26和分层式下驱动外缸24紧密贴合,当机器人末端执行工作时,填充材料25可以吸收气动马达的振动,可以有效防止末端工具在工作过程中发生较大振动。分层式下驱动外缸24与分层式驱动缸体下盖板27之间用减振材料层三28隔开,这样可以降低在末端工具在工作过程中末端工具与工件表面接触产生的振动,从而实现末端工具的高稳定性和可靠性。
36.杆端关节轴承一31、伺服电动缸32、杆端关节轴承二33、动盘34、菱形轴承座35、深沟球轴承36、末端工具连接螺杆37及高速万向节联轴器38;其中伺服电动缸43一端连接3个杆端关节轴承一31,另一端连接3个杆端关节轴承二33,分层式驱动缸体下盖板27与杆端关节轴承一31固定连接,杆端关节轴承二33与动盘34固定连接;末端工具连接螺杆37与气动马达26使用高速万向节联轴器38连接,动盘34和菱形轴承座35通过固定连接,末端工具连接螺杆37底部与末端工具4相连。
37.本发明的实施例中减振材料层一13、减振材料层二23及减振材料层三28均采用橡胶材料,填充材料25采用泡沫,所述减振材料层二23与填充材料25以及减振材料层三28与填充材料25之间通过环氧树脂胶黏剂,把泡沫和橡胶有机粘合在一起。
38.一种通用型主动径向柔顺恒力末端执行器的主动柔顺控制系统,其中伺服驱动控制系统在工业控制领域有着明显的领先优势,且应用范围广泛,对不同控制要求的场景有着很强的适应能力。针对本发明主动径向柔顺模块有直线往复运动的动作特点,结合控制精度高,响应速度快的实际控制要求,综合考虑伺服控制系统各方面的优缺点,将选择采用半闭环伺服控制系统对被控对象进行位置控制。由于本发明主动柔顺控制系统,不仅需要拥有强大的运动控制能力,而且需要强大的数据采集及运算能力,因此该系统在软件设计开发方面同样兼顾更高的要求。所以综合考虑软硬件各方面控制功能及设计要求,该主动柔顺控制系统更适合采用pc与可编程控制器相结合的控制系统架构。在实际运行过程中,上位机读取待加工的零部件的外形和传感器测量末端工具之间的倾斜角度所对应的动作文件向下位机发送动作控制指令,在接到指令后,采用位置控制方式的plc解析该指令信号,并将动作指令转换为高速脉冲信号和方向信号传递给伺服驱动器,伺服驱动器将信号转化为相应的电信号驱动动作执行机构做出相应的动作。
39.工作方法:
40.上电后在机械臂上输入待加工的工件尺寸参数,并判断机械臂是否处于初始工作位置,如果不是的话调整到初始位置,开启气动马达并靠近工件开始工作,x轴、y轴按初始速度匀速运行,进入力反馈信息作业子程序进行作业工作,最后判断是否完成。力反馈信息作业子程序通过六维力传感器获得的信息,经过滤波处理后得到法向力f
x
、fy和fz,判断fz是否在预设恒力工作的范围内,即f
zmin
<fz<f
zmax
,若fz小于最小值,说明此时正压力未达
到设置恒力值,则控制机器人下降至经pid计算后的输出值δz;若fz大于最大值,则控制机器人上升至经pid计算后的输出值δz;判断f
x
、fy是否超过其所限定的最大值,若超过则说明此时工作阻力过大,应根据pid计算结果适当降低打磨速度及进给速度;其余状态保持上一时刻状态继续工作。