1.本发明涉及各类隧道、井巷和坑道等需要喷涂作业的工程设备技术领域,尤其适用于空间密闭的煤矿井下掘进工作完成后巷道混凝土的喷浆支护装备,具体为一种喷浆机器人智能控制系统。
背景技术:
2.现有技术中很多煤矿仍然采用人工喷浆的作业方法,受作业条件、自我保护意识、身体状况、工人情绪、责任心等因素的影响,人工喷浆作业巷道施工方面存在诸如:人工喷浆效率较低、喷浆凭经验喷涂不均、工人劳动强度大、存在安全隐患、喷浆作业造成尘肺病风险等问题。目前,在煤矿巷道喷浆作业中,有喷浆机械臂代替人工喷浆作业,需工人操作液压手柄或电控手柄完成。因此研发喷浆机器人代替喷浆臂是发展的必然趋势。控制系统作为机器人的大脑,是整个机器人的核心单元,故需要设计一个具有自主规划路径、智能安全管控、智能识别、自主定位、拟人化的喷浆机器人智能控制系统。
技术实现要素:
3.针对现有技术中人工喷浆的作业方法存在人工喷浆效率较低、喷浆凭经验喷涂不均、工人劳动强度大、存在安全隐患、喷浆作业造成尘肺病风险等问题,本发明提供一种喷浆机器人智能控制系统,该控制系统结构简单,扩展性强、功能齐全、能有效的提高现场施工质量和效率,保证人员安全和健康。
4.本发明是通过以下技术方案来实现:
5.一种喷浆机器人智能控制系统,包括喷浆机器人和机载控制单元;所述机载控制单元用于控制喷浆机器人实时工作;
6.所述喷浆机器人包括喷枪旋转机构、喷枪摆动机构、升降机构、旋转机构、行走机构、箱体和喷枪;所述旋转机构和箱体装配在行走机构上,所述升降机构的一端装配在旋转机构上,所述升降机构的另一端装配有喷枪旋转机构;所述喷枪摆动机构装配在喷枪旋转机构上,所述喷枪安装在喷枪摆动机构;
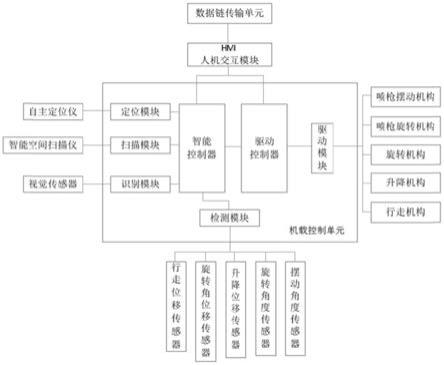
7.所述机载控制单元装配在箱体内,其中机载控制单元包括智能控制器和驱动控制器;智能控制器的输入端连接检测模块;智能控制器与驱动控制器互联;检测模块的输入端分别连接行走位移传感器、旋转角位移传感器、升降位移传感器、旋转角度传感器和摆动角度传感器;所述驱动控制器的驱动端连接驱动模块,所述驱动模块的输出端分别连接喷枪摆动机构;喷枪旋转机构、旋转机构、升降机构和行走机构;
8.所述行走位移传感器装配在行走机构上,旋转角位移传感器装配在旋转机构上,升降位移传感器装配在旋转机构上,旋转角度传感器装配在喷枪旋转机构上,摆动角度传感器装配在喷枪摆动机构上。
9.优选的,机载控制单元设有hmi人机交互模块,所述hmi人机交互模块的输入端分别连接智能控制器和驱动控制器的输出端,用于显示机器人的工作的完成机器人运行轨
迹、巷道三维模型、安全管理、设备运行数据存储以及操作指令的下发,报表管理。
10.进一步的,hmi人机交互模块的输入端连接数据链传输单元,hmi人机交互模块通过连接数据链传输单元,将hmi人机交互模块上存储的数据传送到中央集成控制室及将中央集成控制室的指令传送至机载控制单元。
11.优选的,喷浆机器人结构形状任意设定,所述机载控制单元设有电气通讯接口和模块化的控制单元。
12.优选的,智能控制器的输出端经定位模块连接自主定位仪,所述自主定位仪装配在箱体内。
13.优选的,智能控制器的输出端经扫描模块连接智能空间扫描仪,所述智能空间扫描仪装配在升降机构处,且智能空间扫描仪的摄像头朝向喷枪设置。
14.优选的,智能控制器的输出端经识别模块连接视觉传感器,用于完成喷浆机器人作业环境识别和作业状态中人员行为和物体状态识别。
15.优选的,智能控制单元通过算法解算出作业巷道模型、喷浆质量、喷浆回弹、人员的不安全行为、物的不安全状态;通过特征提取识别算法,识别出钢拱架、挂网与巷道位置及间距、巷道已喷面与待喷面搭接段位置等;时刻测量机器人绝对位置以及相对巷道相对位置,位置机器人姿态控制提供空间位置参数;完成具有自主规划路径、智能安全管控、智能识别、自主定位、自动避障和拟人化的喷浆作业。
16.优选的,机载控制单元系具有智能控制器和驱动控制器的冗余备份功能,提高系统的可靠性。
17.优选的,控制单元内还设有总线接口,用于机载控制单元的总线协议统一管理,提高控制系统的标准化、统一化和使用便捷化,便于系统扩展和接入不同的机械结构。
18.与现有技术相比,本发明具有以下有益的技术效果:
19.本发明提供了一种喷浆机器人智能控制系统,通过机载控制单元电源连接喷浆机器人进行实时控制,机载控制单元通过智能控制器能智能识别巷道作业面工况参数,自主决策,形成智能规划路径、智能安全管控、智能识别和拟人的工作模式,再通过智能控制器对驱动控制器的控制传输,使得喷浆机器人在驱动控制器的控制下进行工作,为煤矿井下混凝土巷道喷射施工提供科学的依据和控制方法。整个控制系统结构简单、扩展性强、功能齐全、能有效的提高现场施工质量和效率,保证人员安全和健康。本发明中电气接口标准,具有通用性和适应性,可满足不同的机械结构。
20.进一步的,机载控制单元设有hmi人机交互模块,所述hmi人机交互模块的输入端分别连接智能控制器和驱动控制器的输出端,用于显示行走位移传感器、旋转角位移传感器、升降位移传感器、旋转角度传感器和摆动角度传感器的检测信号,其中hmi人机交互模块主要包括数据存储器和显示器。完成机器人运行轨迹、巷道三维模型、安全管理、机器人操控、运行数据存储、报表管理等。
21.更进一步的,hmi人机交互模块的输入端连接数据链传输单元,用于将数据通过hmi人机交互模块传输至喷浆机器人,数据链传输单元包括接口管理器和无线交互器,提高机器人系统对外通讯的多样性和通用性,增大机器人的作业半径。
22.进一步的,智能控制器的输出端经定位模块连接自主定位仪,自主定位仪装配在箱体内,自主定位仪时刻测量机器人绝对位置以及相对巷道相对位置,位置机器人姿态控
制提供空间位置参数。
23.进一步的,智能控制器的输出端经扫描模块连接智能空间扫描仪,所述智能空间扫描仪装配在升降机构处,且智能空间扫描仪的摄像头朝向喷枪设置,便于对一些物体进行识别,提高了喷浆机器人整体的智能效果。
24.进一步的,智能控制器的输出端经识别模块连接视觉传感器,用于完成喷浆机器人作业环境识别和作业状态中人员行为和物体状态识别,提高了安全性能。
25.进一步的,箱体内还设有总线接口,用于将机载控制单元与喷浆机器人电源连接,便于对喷浆机器人的整体智能化操作。
附图说明
26.图1为本发明中喷浆机器人智能控制系统结构示意图;
27.图2为本发明中喷浆机器人结构示意图。
28.图中:1-喷浆机器人;2-喷枪旋转机构;3-喷枪摆动机构;4-智能空间扫描仪;5-视觉传感器;6-升降机构;7-旋转机构;8-行走机构;9-箱体;10-智能控制器;11-驱动控制器;12-自主定位仪;13-总线接口;14-喷枪。
具体实施方式
29.为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
30.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
31.下面结合附图对本发明做进一步详细描述:
32.本发明一个实施例中,提供了一种喷浆机器人智能控制系统,该控制系统结构简单,扩展性强、功能齐全、能有效的提高现场施工质量和效率,保证人员安全和健康。
33.具体的,该喷浆机器人智能控制系统,包括喷浆机器人1和机载控制单元;所述机载控制单元与喷浆机器人1电源连接,用于控制喷浆机器人1实时操作;
34.根据图2所示,喷浆机器人1包括喷枪旋转机构2、喷枪摆动机构3、升降机构6、旋转机构7、行走机构8、箱体9和喷枪15;所述旋转机构7和箱体9装配在行走机构8上,所述升降机构6的一端装配在旋转机构7上,所述升降机构6的另一端装配有喷枪旋转机构2;所述喷枪摆动机构3装配在喷枪旋转机构2上,所述喷枪15安装在喷枪摆动机构3;
35.所述机载控制单元装配在箱体9内,其中机载控制单元包括智能控制器和驱动控
制器;根据图1所示,智能控制器的输入端连接检测模块;智能控制器与驱动控制器互联;检测模块的输入端分别连接行走位移传感器、旋转角位移传感器、升降位移传感器、旋转角度传感器和摆动角度传感器;所述驱动控制器的驱动端连接驱动模块,所述驱动模块的输出端分别连接喷枪摆动机构3;喷枪旋转机构2、旋转机构7、升降机构6和行走机构8;
36.所述行走位移传感器装配在行走机构8上,旋转角位移传感器装配在旋转机构7上,升降位移传感器装配在旋转机构7上,旋转角度传感器装配在喷枪旋转机构2上,摆动角度传感器装配在喷枪摆动机构3上。
37.其中,智能控制器主要用于采集机器人智能传单元和外设传感器单元的数据,完成自诊断、自主规划路径、智能安全管控、智能识别、自主定位、自主学习、记忆和拟人化训练、故障智能诊断等功能。
38.驱动控制器主要根据智能控制器的解算结果,完成机器人执行机构的运动控制。
39.喷浆机器人1个执行机构的位移传感器和角度传感器。位移传感器通过专用电缆与智能控制器连接,角度传感器通过can总线或者modbus总线与智能控制器连接。它们的主要作用是测量机器人各机构准确的位置信息,实现对机器人运动的精准控制。
40.具体的,机载控制单元1设有hmi人机交互模块,所述hmi人机交互模块的输入端分别连接智能控制器和驱动控制器的输出端,用于显示行走位移传感器、旋转角位移传感器、升降位移传感器、旋转角度传感器和摆动角度传感器的检测信号,其中hmi人机交互模块主要包括:数据存储器和显示器。完成机器人运行轨迹、巷道三维模型、安全管理、机器人操控、运行数据存储、报表管理等,并与数据链传输单元进行机器人系统的数据交互。
41.其中,hmi人机交互模块的输入端连接数据链传输单元,用于将数据通过hmi人机交互模块传输至喷浆机器人1。数据链传输单元主要包括:接口管理器和无线交互器。接口管理模块是实现机器人系统通讯接口的标准化管理,提高机器人系统对外通讯的多样性和通用性。无线交互器保障机器人系统数据安全可靠的传输到中控系统或者集控中心,确保中控系统或者集控中心的操控指令能安全传输到机器人系统,增大机器人的作业半径。
42.具体的,所述喷浆机器人1结构形状任意设定,所述机载控制单元具有标准、统一的电气通讯接口和模块化的控制单元。
43.具体的,智能控制器的输出端经定位模块连接自主定位仪12,所述自主定位仪12装配在箱体9内,自主定位仪通过can总线与智能控制器连接,时刻测量机器人绝对位置以及相对巷道相对位置,位置机器人姿态控制提供空间位置参数。
44.具体的,智能控制器的输出端经扫描模块连接智能空间扫描仪4,所述智能空间扫描仪4装配在升降机构6处,且智能空间扫描仪4的摄像头朝向喷枪14设置。智能空间扫描仪4通过can总线与智能控制器2连接,完成机器人待作业巷道的三维扫描,通过特征提取识别算法,识别出钢拱架与巷道位置及间距、巷道已喷面与待喷面搭接段位置等。
45.具体的,智能控制器的输出端经识别模块连接视觉传感器5,用于完成喷浆机器人1作业环境识别和作业状态中人员行为和物体状态识别。视觉传感器通过tcp协议与智能控制器连接,完成机器人作业环境识别和作业状态中人员行为和物体状态识别,运用特殊算法解算出作业巷道模型、喷浆质量、喷浆回弹、人员的不安全行为、物的不安全状态。
46.具体的,智能控制单元具有算法解算出作业巷道模型、喷浆质量、喷浆回弹、人员的不安全行为、物的不安全状态;通过特征提取识别算法,识别出钢拱架与巷道位置及间
距、巷道已喷面与待喷面搭接段位置等;时刻测量机器人绝对位置以及相对巷道相对位置,位置机器人姿态控制提供空间位置参数;完成具有自主规划路径、智能安全管控、智能识别、自主定位、自动避障和拟人化的喷浆作业。
47.具体的,机载控制单元系具有智能控制器和驱动控制器的冗余备份功能,提高系统的可靠性。
48.具体的,箱体9内还设有总线接口13,用于机载控制单元的总线协议统一管理,提高控制系统的标准化、统一化和使用便捷化,便于系统扩展和接入不同的机械结构。
49.本发明所提供了一种喷浆机器人智能控制系统,在使用时:
50.喷浆机器人1工作时,首先完成初始化:各单元模块完成自身自诊断和自主定位仪完成自身定位定姿;其次智能空间扫描仪4完成待作业对象的三维点云模型,并通过专用算法,识别出锚架位置及间距,巷道已喷面与待喷面搭位置关系;随之导入巷道设计文件,与扫描数据对比,计算出待喷面在巷道主方向上超欠挖状态、作业范围、超欠挖方量等,并按喷涂工艺要求完成作业区域划分;然后通过自主路径规划策略,生成喷涂路径规划文件,通过驱动解算,解算出各执行机构的运动参数;同时执行机构安装的传感器实时反馈运动姿态,驱动控制器实时做位置检测,智能控制器实时校准规划路径,保障喷涂路径的精准控制;喷涂作业过程中的数据实时通过数据链系统传输到后台控制中心,便于对喷浆路径和质量的实时分析和监控。
51.喷涂作业过程中,智能控制器会管控整个作业过程中的安全,划分作业红区,结合智能传单元检测的数据,发生红区报警后,智能控制器会做出停机、避险等报警信息,并控制喷浆机器人1自动执行对应解决措施。智能控制器不断自主学习,通过记忆喷浆过程状态参数,及时对拟人化的喷浆作业修正,不断进行记忆学习、再记忆再学习,持续完善自我的工艺经验库,不断提升喷浆质量。
52.喷涂完成后,智能控制器通过数据链反馈喷涂质量、回弹率统计、平整度、智能安全管控等数据,并给出历史喷涂与本次作业的数据对比,为后续作业和同类巷道喷浆设计提供支持。
53.本发明一种喷浆机器人智能控制系统深度结合成熟的人工喷浆工艺,采用智能空间扫描仪4进行作业对象的自动定位、自动扫描、自动提取、自动识别,利用先进的串联多关节臂架控制策略和轨迹规划算法,机器人按照工艺流程进行自主喷浆而无需人工干预。为了提高操作系统的可靠性,该机器人有手动、本地、遥控、智能操作模式等。一种喷浆机器人智能控制系统彻底解决人工喷浆效率较低、喷浆凭经验喷涂不均、工人劳动强度大、存在安全隐患、喷浆作业造成尘肺病风险等问题,提升煤矿喷浆设备的智能化水平,为智慧矿山的建设提供支撑。
54.本发明专利的设计思路和控制方法能够为井下混凝土喷浆装备和工艺提供科学的参考依据和现场经验,通过后期不断的优化控制系统的性能和工艺需求,能够极大的提高作业现场施工质量和效率,对井下混凝土喷浆装备的研制和工艺推广具有重要的实际工程意义。
55.最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何
修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。