1.本实用新型涉及机器人技术领域,特别涉及一种机器人集成电控柜及机器人电气控制系统。
背景技术:
2.面对当下的疫情时代,整个社会对无人化消毒的需求急剧增长,医疗区域与办公场所等公共空间中日常消毒、清扫等工作可能造成工作人员与病毒直接接触增加了工作人员的感染几率。为了减少人员感染几率可以使用机器人代替工作人员进行工作。
3.但使用机器人进行工作时,由于目前市场上的产品多为控制系统分散布局于机器人本体,系统各部分耦合度高,无法快速进行迭代处理,不利于功能复用以及产品的快速迭代。因此,需要大量的不同工作类型的机器人。
4.因此,亟需一种机器人集成电控柜及机器人电气控制系统来解决上述问题。
技术实现要素:
5.本实用新型解决的技术问题在于,提供了一种机器人集成电控柜及机器人电气控制系统,解决了机器人现有系统各部分耦合度高,无法快速迭代不同作业方案的问题。
6.本实用新型解决其技术问题是采用以下的技术方案来实现的:
7.一种机器人集成电控柜,包括:主控制器模块、电源管理模块、运动控制模块、作业控制模块、充电控制模块、通信模块;主控制器模块分别与运动控制模块、作业控制模块通过通信协议通信连接,并通过以太网协议与通信模块通信连接;电源管理模块与运动控制模块之间通过通信协议连接,包括但不限于rs232、rs485、can协议;电源管理模块和充电控制模块通过通信协议通信连接。
8.在本实用新型的较佳实施例中,上述机器人集成电控柜还包括:伺服驱动模块和连接器模块;连接器模块分别与电源管理模块、运动控制模块及作业控制模块相连;伺服驱动模块分别于运动控制模块及电机相连。
9.在本实用新型的较佳实施例中,上述主控制器模块,用于对机器人进行控制;电源管理模块,用于与电池连接后分别给机器人集成电控柜的各模块进行供电;运动控制模块,用于获取机器人搭载的传感器采集的信号,并对伺服驱动模块进行控制;作业控制模块,用于控制机器人执行作业;充电控制模块,用于实现机器人的充电控制;伺服驱动模块,用于接收运动控制模块发出的指令对电机进行控制;通信模块,用于实现机器人与服务器的通信;连接器模块,用于实现机器人集成电控柜内各模块与机器人搭载的执行模块之间的供电与通讯。
10.在本实用新型的较佳实施例中,上述连接器模块包括:第一连接器、第二连接器、第三连接器、第四连机器和第五连接器。
11.一种机器人电气控制系统,其特征在于,机器人电气控制系统包括上述中任一的机器人集成电控柜以及机器人本体搭载的执行模块;机器人集成电控柜通过设置在电控柜
外壁的连接器模块与机器人本体搭载的执行模块相连,执行模块包括:充电组件、运动控制组件、作业组件、操控面板组件和电池组件。
12.在本实用新型的较佳实施例中,上述充电控制模块的充放电接口通过连接器模块与充电组件相连,充电组件包括:自动充电电极片与手动充电接口。
13.在本实用新型的较佳实施例中,上述运动控制模块和电源管理模块通过连接器模块与运动控制组件相连。
14.在本实用新型的较佳实施例中,上述作业控制模块和电源管理模块通过连接器模块与作业组件相连,作业组件包括:消毒作业组件、清扫作业组件和巡逻作业组件。
15.在本实用新型的较佳实施例中,上述操控面板组件包括:操控按钮和显示屏;运动控制模块、电源管理模块和主控制器模块通过连接器模块与操控按钮相连;显示屏通过通信模块与主控制器模块相连。
16.在本实用新型的较佳实施例中,上述电源管理模块通过连接器模块的控制接口与机器人搭载的电池组件相连,电池组件包括电池放电接口与电池通信接口。
17.本实用新型采用上述技术方案达到的技术效果是:将主控单元集成于一个电控柜内,包括主控制器模块、通信模块、电源管理模块、运动控制模块、作业控制模块、充电控制模块和伺服驱动模块等。然后通过电控柜外壁的连接器模块与机器人搭载的各执行模块的电气元件相连,以完成信息采集、运动控制及其他作业功能。将控制单元集成一体的方式,有利于控制单元的解耦合,可针对不同功能机器人做迭代处理,易于移植,提高新产品的开发效率。
18.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明。
附图说明
19.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本实用新型的实施例,并与说明书一起用于解释本实用新型的原理。
20.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
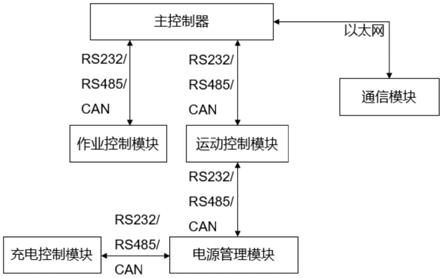
21.图1为本实用新型实施例示出的机器人集成电控柜的模块结构示意图;
22.图2为本实用新型实施例示出的机器人电气控制系统的原理示意图。
具体实施方式
23.为更进一步阐述本实用新型为达成预定实用新型目的所采取的技术手段及功效,下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型的实施例保护的范围。通过具体实施方式的说明,当可对本实用新型为达成预定目的所
采取的技术手段及功效得以更加深入且具体的了解,而且所附图式仅是提供参考与说明之用,并非用来对本实用新型加以限制。
24.请参阅图1,图1为本实用新型实施例示出的机器人集成电控柜的模块结构示意图。
25.下面结合图1对机器人集成电控柜的各个模块结构进行介绍:
26.在一实施方式中,机器人集成电控柜包括:主控制器模块、电源管理模块、运动控制模块、作业控制模块、充电控制模块、通信模块。主控制器模块分别与运动控制模块、作业控制模块通过通信协议通信连接,并通过以太网协议与通信模块通信连接;电源管理模块与运动控制模块之间通过通信协议通信连接;电源管理模块和充电控制模块通过通信协议通信连接。
27.具体地,主控制器模块为工控机,电源管理模块为电源管理板,运动控制模块为运动控制板,作业控制模块为作业控制板,充电控制模块为充电控制板,通信模块为4g路由器。其中,电源管理板、运动控制板、作业控制板、工控机之间通过通信协议连接,包括但不限于rs232、rs485、can等协议,电源管理板、充电控制板通过通信协议连接,包括但不限于rs232、rs485、can等协议,工控机、4g路由器通过ethernet通讯。
28.在一实施方式中,机器人集成电控柜还包括:伺服驱动模块和连接器模块;连接器模块分别与电源管理模块、运动控制模块及作业控制模块相连;伺服驱动模块分别于运动控制模块及电机相连。
29.其中,连接器模块可以但不限于包括:第一连接器、第二连接器、第三连接器、第四连机器和第五连接器。连接器模块中连接器的数量与机器人搭载的执行模块相关联。
30.具体地,连接器可以但不限于航空插头连接器,还可以是空中对接端子连接器等。
31.具体地,伺服驱动模块为伺服驱动器,该伺服驱动器不与连接器模块的连接器相连,直接通过线缆分别与电机和运动控制模块相连,以使得伺服驱动器可以通过电机来实现机器人的运动功能。
32.在一实施方式中,电源管理模块还通过线缆分别与机器人集成电控柜中的各个模块进行连接,以实现在电源管理模块在与电池连接后,对电池的电源经稳压降压电路分别给其它模块进行供电。具体地,机器人执行模块在与连接器连接后,电源管理模块可以给机器人所有元器件供电。
33.在一实施方式中,主控制器模块,用于对机器人进行控制;电源管理模块,用于与电池连接后分别给机器人集成电控柜的各模块进行供电;运动控制模块,用于获取机器人搭载的传感器采集的信号,并对伺服驱动模块进行控制;作业控制模块,用于控制机器人执行作业;充电控制模块,用于实现机器人的充电控制;伺服驱动模块,用于接收运动控制模块发出的指令对电机进行控制;通信模块,用于实现机器人与服务器的通信;连接器模块,用于实现机器人集成电控柜内各模块与机器人搭载的执行模块之间的供电与通讯。
34.具体地,主控制器模块,用以完成整体机器人系统的调度,如开机自启动各工作模块、查询并预测电量、自动回充规划等。电源管理模块,用以将供电电池的电源经降压稳压电路分别给所有元器件供电,并与电池通讯,读取电压、容量等信息,上传给主控制器模块。运动控制模块,用以实现对伺服驱动模块的控制、对超声波模块的信息读取、防跌落及安全触边的信号接收。作业控制模块,用以完成机器人的消毒功能。如紫外消毒、喷雾消毒及擦
拭消毒等。充电控制模块,用以实现充电电极与充电桩对接后的自动充电功能。伺服驱动模块,用以接受运动控制模块的命令实现电机控制,完成机器人运动功能。4g路由模块,与主控制器模块相连,用以实现机器人本体与云端的通讯功能。连接器模块,用以实现电控柜内集成的控制单元与机器人各执行模块的供电与通讯。
35.本实施方式的机器人集成电控柜,将主控单元集成于一个电控柜内,包括主控制器模块、通信模块、电源管理模块、运动控制模块、作业控制模块、充电控制模块和伺服驱动模块等。电控柜内的各控制模块通过多种通信协议连接,有利于控制单元的解耦合,易于移植。
36.请参阅图2,图2为本实用新型实施例示出的机器人电气控制系统的原理示意图。
37.下面结合图2对机器人电气控制系统进行说明:
38.在一实施方式中,机器人电气控制系统,包括上述实施方式中任一的机器人集成电控柜以及机器人本体搭载的各个执行模块。其中,机器人集成电控柜通过设置在电控柜外壁的连接器模块与机器人本体搭载的执行模块相连,执行模块包括:充电组件、运动控制组件、作业组件、操控面板组件和电池组件。
39.具体地,机器人集成电控柜包括主控制器模块、电源管理模块、运动控制模块、作业控制模块、充电控制模块、通信模块、伺服驱动模块和连接器模块。其中,主控制器模块为工控机、电源管理模块为电源管理板、运动控制模块为运动控制板、充电控制模块为充电控制板、通信模块为4g路由器、作业控制模块可以但不限于消毒控制板还可以是清扫控制板和巡逻控制板等(作业控制板可匹配机器人的作业任务),伺服驱动模块为伺服驱动器、连接器模块可以但不限于航空插头连接器还可以是空中对接端子等连接器。
40.机器人本体搭载的执行模块包括充电组件、运动控制组件、作业组件、操控面板组件和电池组件等。其中,作业组件可以但不限于消毒组件还可以是其它组件,如清扫组件等(具体组件情况匹配机器人的作业任务),运动控制组件包括导航组件,电池组件包括锂电池,操控面板组件包括各类操控按钮和显示屏等。
41.具体地,机器人搭载的执行模块与电控柜外壁的连接器模块通过航空插头连接器进行可插拔连接或其它可拆卸式进行连接,以实现电源供电、信号采集及通信控制等功能。
42.在一实施方式中,充电控制模块的充放电接口通过连接器模块与充电组件相连,充电组件包括:自动充电电极片与手动充电接口。
43.具体地,可通过四芯航空插头,将充电控制板的充电接口与机器人本体充电模块相连。充电模块包括自动充电电极片与手动充电接口;充电输入接口与自动充电电极相连,充电输出接口与手动充电接口连接锂电池充电口。
44.在一实施方式中,运动控制模块和电源管理模块通过连接器模块与运动控制组件相连。
45.具体地,可通过二十八芯航空插头,将运动控制板及电源管理板的控制接口与机器人本体运动控制组件的各电气元件相连。其中,运动控制组件可以为导航组件包括imu、红外测距传感器、安全触边、超声波传感器与机器人灯光。运动控制板采集imu、红外测距传感器、安全触边与超声波传感器等电气元件的信号上传到工控机用于主控调度,控制电源管理板供电接口,完成灯光等显示。
46.在一实施方式中,作业控制模块和电源管理模块通过连接器模块与作业组件相
连,作业组件包括:消毒作业组件、清扫作业组件和巡逻作业组件。
47.具体地,可通过二十芯航空插头,将作业控制板(如消毒控制板)及电源管理板的控制接口与机器人本体的作业组件(如,消毒组件)的各电气元件相连。其中,消毒组件可以包括:齿轮自吸泵、电磁阀、流量仪与液位传感器。在机器人搭载的作业组件为消毒组件时,消毒控制板采集流量仪与液位传感器的信号上传到工控机用于主控调度,通过调节源管理板供电接口,进一步控制齿轮自吸泵与电磁阀喷洒消毒液完成消毒作业。
48.在一实施方式中,操控面板组件包括:操控按钮和显示屏;运动控制模块、电源管理模块和主控制器模块通过连接器模块与操控按钮相连;显示屏通过通信模块与主控制器模块相连。
49.具体地,可以通过十二芯航空插头,将运动控制板、电源管理板及工控机的控制接口与机器人本体搭载的操控面板组件相连。操控面板组件包括:电源开关按钮、急停按钮、手/自动切换按钮、手动喷雾按钮等各类操控按钮以及显示屏、喇叭和麦克风等装置。电源管理板可以连接电源开关按钮,以完成机器人的开关机功能。运动控制板可以与急停按钮、手/自动切换按钮、手动喷雾按钮等相连,以完成人工手动喷洒消毒功能。工控机与显示屏相连,以完成机器人的信息显示与人机交互功能。
50.在一实施方式中,电源管理模块通过连接器模块的控制接口与机器人搭载的电池组件相连,电池组件包括电池放电接口与电池通信接口。
51.具体地,可通过七芯航空插头,将电源管理板的控制接口与电池组件(如,锂电池组)相连,电池组件的放电口连接电源管理板电池输入接口,电池组件通讯口连接电源管理板rs485通讯端口,以读取锂电池组bms信息,如电池电压、剩余电量等。然后将读取到的电池信息发送到到工控机,使得工控机可根据电池信息进行主控调度,并结合消毒任务进度等,以完成机器人自动回充等功能。
52.本实施方式的中,由于机器人集成电控柜与机器人本体搭载的执行模块主要通过五个可插拔航空插头连接。使得机器人需更换消毒方式或工作模式时,如紫外消毒、擦拭消毒,只需要将电控柜中的作业控制板更换或做相应调整,即可适配不同消毒方式或工作模式的机器人本体,大大减小机器人开发及装配周期。而且,通过航空插头对接的方式电控柜可快捷简便的适配于各种工作模式的机器人本体,比较容易的按需求安装于机器人本体任意位置。在作业元件体积较小时,如紫外灯消毒组件,电控柜可直接放置于机器人的行走底盘,其上安装作业平台(从上往下为作业平台、电控柜和行走底盘)。消毒元件体积较大时,如消毒液储蓄桶,电控柜可放置于作业平台之上(从上往下为电控柜、作业平台和行走底盘)。
53.本实施方式中,将电控柜与机器人本体模块化、弱耦合的方式连接,使电控柜可便捷、快速的移植于不同作业形式(如紫外消毒和擦拭消毒等)的机器人本体,甚至拓展到其他作业模式/功能的机器人本体,如清扫机器人、站岗机器人、巡逻机器人等。只需根据机器人本体功能开发相应作业控制模块,即可将新版本电控柜通过可插拔连接器快速的适配并安装于新型号机器人,节省开发成本的同时缩短开发周期。
54.以上结合附图详细描述了本实用新型的优选实施方式,但是本实用新型并不限于上述实施方式中的具体细节,上述实施例及附图是示例性的,附图中的模块或流程并不一定是实施本实用新型实施例所必须的,不能理解为对本实用新型的限制,在本实用新型的
技术构思范围内,可以对本实用新型的技术方案进行多种简单变型和组合,这些简单变型和组合均属于本实用新型的保护范围。