1.本发明涉及一种巡检机器人,特别是涉及基于双目视觉的吊轨式巡检机器人。
背景技术:
2.皮带输送机广泛应用于冶金、煤炭、交通、水电、化工等行业领域,其具备输送量大、结构简单、维修方便、成本较低、通用性强等特点。但是皮带输送机如果使用不当的话,往往会有一些故障现象发生,导致设备故障甚至关乎使用人员人身安全等。因此,在电厂等企业的输煤管廊,需要安排人工进行定期巡检,需要耗费大量的人力。随着科学技术的发展,目前也有部分电厂,在一些工作环境,试点巡检机器人部分代替人工进行一部分巡检工作。巡检机器人可按照既定线路,定时对输煤线路进行巡检,传送输煤皮带上的视频数据到远端控制中心,进行远程的故障筛查和诊断。如果在机器人巡检过程中,通过视频流数据发现输煤皮带的跑偏、皮带撕裂、异物或落煤情况,可及时通知相关人员到现场处理。但是,目前的巡检机器人,通常采用单景深的防爆摄像头来实现巡检,这对于远端控制中心来说,辨别上存在难度,往往只有经验较为丰富的工作人员,才能从视频流反应的画面中,准确判断故障类型,时常也会出现误判的情况。
技术实现要素:
3.鉴于现有技术存在的上述问题,本发明的目的是提供一种基于双目视觉的吊轨式巡检机器人,该巡检机器人可通过双目视觉方式,采集并传送视频流,实现更为准确的远程诊断。
4.为了实现上述目的,本发明一个方面提供的基于双目视觉的吊轨式巡检机器人,包括轨道组件和滑动设置于所述轨道组件上的作动部,其中,所述轨道组件上滑动设置有一滑动架,所述作动部包括设置在所述滑动架上的控制箱,所述控制箱底部悬挂设置有一电源,所述电源两侧对分别对设有左眼摄像头和右眼摄像头,所述左眼摄像头配置为采集左眼图像帧,所述右眼摄像头配置为采集右眼图像帧,所述控制箱配置为针对左眼图像帧及右眼图像帧进行预处理并合成视频流。
5.作为优选,所述左眼摄像头和/或所述右眼摄像头的一侧,设置有补光灯。
6.作为优选,所述轨道组件包括轨道架和设置在所述轨道架上的可拆卸滑轨,所述滑动架包括架体和设置在所述架体上的滑块,所述滑块构造为滑动卡接在所述可拆卸滑轨上。
7.作为优选,所述轨道架的一端设置有第一转动基台,另一侧设置有第二转动基台,所述第一转动基台内设置有皮带从动轮,所述第二转动基台内设置有皮带主动轮,所述皮带从动轮和所述皮带主动轮之间设置有皮带,所述皮带主动轮与一伺服电机连接,所述滑动架的所述架体上,通过一固定件与所述皮带连接。
8.作为优选,所述伺服电机上连接有一减速机。
9.作为优选,所述可拆卸滑轨平行设置有两个,所述滑块位置相对地各设置在所述
可拆卸滑轨12上。
10.作为优选,所述轨道架为一中空型材,其外侧设置有多个嵌槽,所述可拆卸轨道嵌设与所述嵌槽内。
11.作为优选,所述可拆卸滑轨相对地两侧,设置有滑槽,其截面呈“工”字型。
12.作为优选,所述控制箱在对左眼图像帧或右眼图像帧进行预处理时:
13.将所述第一图像帧和所述第二图像帧转化为灰度图像;
14.进行直方图均衡化处理和/或进行中值滤波以消除图像中的部分噪声。
15.本发明提供的基于双目视觉的吊轨式巡检机器人,可通过左眼摄像头和右眼摄像头分别采集巡检区域的图像信息,进而两路图像信息会分别经过预处理后合成为一路视频流,该视频流为包含左眼图像帧和右眼图像帧的三维视频流。如此一来,基于类似人眼的双目视觉原理,远程监控人员可以获得更好的景深效果,从而实现更为精准的视频判断结果。
附图说明
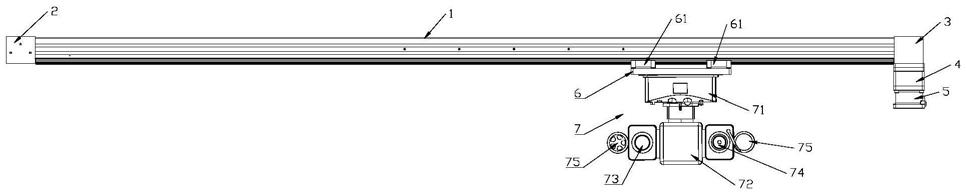
16.图1为本发明的基于双目视觉的吊轨式巡检机器人的结构示意图。
17.图2为本发明的基于双目视觉的吊轨式巡检机器人的另一个结构示意图(不包含作动部)。
18.图3为图2中沿a-a向的剖面结构示意图。
19.图4为图2中沿b-b向的剖面结构示意图。
20.图5为本发明的基于双目视觉的吊轨式巡检机器人的立体结构示意图。
21.图6为本发明的基于双目视觉的吊轨式巡检机器人的另一个立体结构示意图(不包含轨道架)。
22.附图标记:
23.1-轨道组件,2-第一转动基台,3-第二转动基台,4-伺服电机,5-减速机,6-滑动架,7-作动部,8-皮带,11-轨道架,12-可拆卸滑轨,21-皮带从动轮,31-皮带主动轮,61-滑块,62-固定件,71-控制箱,72-电源,73-左眼摄像头,74-右眼摄像头,75-补光灯,121-滑槽。
具体实施方式
24.为使本领域技术人员更好的理解本发明的技术方案,下面结合附图和具体实施方式对本发明作详细说明。
25.此处参考附图描述本发明的各种方案以及特征。
26.通过下面参照附图对给定为非限制性实例的实施例的优选形式的描述,本发明的这些和其它特性将会变得显而易见。
27.还应当理解,尽管已经参照一些具体实例对本发明进行了描述,但本领域技术人员能够确定地实现本发明的很多其它等效形式,它们具有如权利要求所述的特征并因此都位于借此所限定的保护范围内。
28.当结合附图时,鉴于以下详细说明,本发明的上述和其他方面、特征和优势将变得更为显而易见。
29.如图1至图6所示,本发明实施例提供的基于双目视觉的吊轨式巡检机器人,包括
轨道组件1和滑动设置于所述轨道组件1上的作动部7,其中,所述轨道组件1上滑动设置有一滑动架6,所述作动部7包括设置在所述滑动架6上的控制箱71,所述控制箱71底部悬挂设置有一电源72,所述电源72两侧对分别对设有左眼摄像头73和右眼摄像头74,所述左眼摄像头73配置为采集左眼图像帧,所述右眼摄像头74配置为采集右眼图像帧,所述控制箱71配置为针对左眼图像帧及右眼图像帧进行预处理并合成视频流。在本发明中,控制箱71可针对左眼图像帧及右眼图像帧进行合并生成三维视频流,而后再通过远程视频审核,用于及时发现巡检过程中发现的问题。优选地所述控制箱71在对左眼图像帧或右眼图像帧进行预处理时:
30.将所述第一图像帧和所述第二图像帧转化为灰度图像;
31.进行直方图均衡化处理和/或进行中值滤波以消除图像中的部分噪声。而在具体的算法选择上,例如将图像帧转化为灰度图像,或者基于直方图均衡化处理,或者进行中值滤波以消除噪声,均可采用常规算法进行。
32.由于巡检路线上各种环境,可能存在光线较弱的情况,因此,为了取得更好的成像效果,在本发明中,所述左眼摄像头73和/或所述右眼摄像头74的一侧,可设置有补光灯75。该补光灯可由控制箱71控制,根据光线传感器感应环境光,从而自动开启,且该补光灯75可选地为led矩阵等或者红外补光灯。
33.对于本发明中所述吊轨式巡检机器人来说,所述轨道组件1包括轨道架11和设置在所述轨道架11上的可拆卸滑轨12,所述滑动架6包括架体(图中未标注)和设置在所述架体上的滑块61,所述滑块61构造为滑动卡接在所述可拆卸滑轨12上。
34.在另一些实施例中,针对本发明的上述结构,所述轨道架11的一端设置有第一转动基台2,另一侧设置有第二转动基台3,所述第一转动基台2内设置有皮带从动轮21,所述第二转动基台3内设置有皮带主动轮31,所述皮带从动轮21和所述皮带主动轮31之间设置有皮带8,所述皮带主动轮31与一伺服电机4连接,所述滑动架6的所述架体上,通过一固定件62与所述皮带8连接。在所述伺服电机4工作时,由于滑动架6与所述皮带8固定连接,因此随着伺服电机4工作带动皮带8动作,进而拖动滑动架6沿轨道组件1动作。另外,针对伺服电机4来说,在本发明中,其上优选连接有一减速机5。
35.参见图6所示,在本发明中,为了提升滑移的稳定性,如图所示,所述可拆卸滑轨12平行设置有两个,所述滑块61位置相对地各设置在所述可拆卸滑轨12上。基于这样的设计,在本发明中,所述轨道架为一中空型材,其外侧设置有多个嵌槽,所述可拆卸轨道嵌设与所述嵌槽内。如图3和图4所示,轨道架11为一方管形型材,在型材的四个面,均设置有嵌槽,因此,可根据实际情况,选在在轨道架11的其中一个面或多个面上形成便于滑动的轨道。更进一步地,所述可拆卸滑轨相对地两侧,设置有滑槽,其截面呈“工”字型。
36.以上实施例仅为本发明的示例性实施例,不用于限制本发明,本发明的保护范围由权利要求书限定。本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明的保护范围内。