1.本实用新型涉及机械加工技术领域,尤其涉及一种基于机械臂和吸盘的工件抓取装置。
背景技术:
2.机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。
3.在机械臂可在工件加工装配过程中对工件进行抓取,需要在机械臂上安装与工件适配的夹具对工件进行固定,针对于表面光滑的工件,也可采用吸盘进行抓取,但是,由于工件在切削加工完毕后,其表面可能存在残留金属碎屑,会导致吸盘抓取失效,而现有技术中的机械臂上的吸盘缺少将工件表面金属碎屑清除的机构。
4.为解决上述问题,本技术中提出一种基于机械臂和吸盘的工件抓取装置。
技术实现要素:
5.一、实用新型目的
6.为解决背景技术中存在的技术问题,本实用新型提出一种基于机械臂和吸盘的工件抓取装置,具有能避免因工件表面残留的金属碎屑导致的抓取失效、抓取灵活度高的特点。
7.二、技术方案
8.为解决上述技术问题,本实用新型提供了一种基于机械臂和吸盘的工件抓取装置,包括机械臂,所述机械臂底端设有安装座,所述机械臂顶端设有用于驱动安装座转动的角度调节机构,所述安装座两侧均设有抓取机构;
9.所述抓取机构包括底板、竖座和吸盘,所述竖座固定安装在底板上,所述竖座底端与吸盘固定连接,所述竖座顶端固定安装有微型气泵,所述微型气泵底端固定连接有管体,所述管体贯穿竖座,所述管体底端与吸盘固定连接,所述管体底端固定设置有导气板,所述导气板上开设有多个导气孔;
10.所述底板顶端设有顶板,所述顶板底端固定安装有第一电动推杆,所述第一电动推杆伸缩端与底板固定连接,所述顶板开设有贯穿的滑孔,所述顶板顶端固定连接有固定座,所述安装座两侧均设有间距调节机构。
11.优选的,所述底板顶端固定连接有导向杆,所述顶板两侧均设导向孔,所述导向杆与导向孔内侧滑动连接。
12.优选的,所述导向杆设置两个,两个所述导向杆以底板的中轴线为对称轴对称分布。
13.优选的,所述间距调节机构包括第二电动推杆和滑杆,所述第二电动推杆固定安装在安装座的侧壁上,所述第二电动推杆伸缩端与固定座固定连接,所述滑杆一端与安装座的侧壁固定连接,所述滑杆与滑孔内侧滑动连接。
14.优选的,所述滑杆远离安装座的一端固定连接有限位块。
15.优选的,所述角度调节机构包括电机和转轴,所述电机固定安装在机械臂的顶端,所述电机输出端与转轴传动连接,所述转轴底端与安装座固定连接。
16.本实用新型的上述技术方案具有如下有益的技术效果:
17.1、本实用新型通过设置抓取机构抓取工件,吸盘贴附在工件表面,即可对工件进行吸附固定,通过设置微型气泵和管体,微型气泵向管体内排气,气流通过导气板上的导气孔吹向工件表面,可将工件与吸盘的接触面上的碎屑吹扫清除,使得吸盘能够紧密吸附在工件表面,避免抓取失效。
18.2、本实用新型通过设置间距调节机构和角度调节机构,间距调节机构能调节抓取机构的抓取间距,角度调节机构能调节抓取机构的抓取角度,从而使抓取机构在抓取工件时具有更高的灵活度。
附图说明
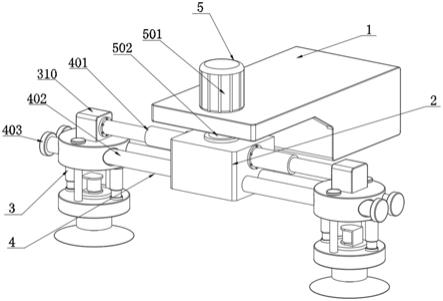
19.图1为本实用新型的整体结构示意图;
20.图2为本实用新型的抓取机构整体结构示意图;
21.图3为本实用新型的抓取机构爆炸结构示意图;
22.图4为本实用新型的竖座和吸盘正面剖视图;
23.图5为本实用新型的导气板整体结构示意图。
24.附图标记:1、机械臂;2、安装座;3、抓取机构;301、底板;302、竖座;303、吸盘;304、微型气泵;305、管体;306、导气板;307、顶板;308、第一电动推杆;309、滑孔;310、固定座;311、导向杆;312、导向孔;313、导气孔;4、间距调节机构;401、第二电动推杆;402、滑杆;403、限位块;5、角度调节机构;501、电机;502、转轴。
具体实施方式
25.为使本实用新型的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本实用新型进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本实用新型的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本实用新型的概念。
26.如图1-5所示,本实用新型提出的一种基于机械臂和吸盘的工件抓取装置,包括机械臂1,机械臂1底端设有安装座2,机械臂1顶端设有用于驱动安装座2转动的角度调节机构5,安装座2两侧均设有抓取机构3;
27.抓取机构3包括底板301、竖座302和吸盘303,竖座302固定安装在底板301上,竖座302底端与吸盘303固定连接,竖座302顶端固定安装有微型气泵304,微型气泵304底端固定连接有管体305,管体305贯穿竖座302,管体305底端与吸盘303固定连接,管体305底端固定设置有导气板306,导气板306上开设有多个导气孔313;
28.底板301顶端设有顶板307,顶板307底端固定安装有第一电动推杆308,第一电动推杆308伸缩端与底板301固定连接,所述顶板307开设有贯穿的滑孔309,顶板307顶端固定连接有固定座310,安装座2两侧均设有间距调节机构4。
29.需要说明的是,启动第一电动推杆308向下推动底板301,底板301带动竖座302和
吸盘303下移,使吸盘303贴附在工件表面,即可对工件进行吸附固定,启动第一电动推杆308收缩即可将工件抓起,再通过机械臂1的移动,可将工件转移,在吸盘303与工件接触前,启动微型气泵304向管体305内排气,气流通过导气板306上的导气孔313吹向工件表面,可将工件与吸盘303的接触面上的碎屑吹扫清除,底板301顶端固定连接有导向杆311,顶板307两侧均设导向孔312,导向杆311与导向孔312内侧滑动连接,底板301升降时带动导向杆311顺着导向孔312滑动,导向杆311设置两个,两个导向杆311以底板301的中轴线为对称轴对称分布,可提高底板301升降时的稳定性。
30.如图1-3所示,间距调节机构4包括第二电动推杆401和滑杆402,第二电动推杆401固定安装在安装座2的侧壁上,第二电动推杆401伸缩端与固定座310固定连接,滑杆402一端与安装座2的侧壁固定连接,滑杆402与滑孔309内侧滑动连接,滑杆402远离安装座2的一端固定连接有限位块403,启动第二电动推杆401伸缩,第二电动推杆401可带动抓取机构3整体移动,顶板307可沿着滑杆402平稳滑动,从而能调节抓取机构3的抓取间距。
31.如图1所示,角度调节机构5包括电机501和转轴502,电机501固定安装在机械臂1的顶端,电机501输出端与转轴502传动连接,转轴502底端与安装座2固定连接,启动电机501带动转轴502转动,转轴502带动安装座2转动,从而能调节抓取机构3的抓取角度。
32.本实用新型的工作原理:通过设置抓取机构3用于抓取工件,启动第一电动推杆308向下推动底板301,底板301带动竖座302和吸盘303下移,使吸盘303贴附在工件表面,即可对工件进行吸附固定,启动第一电动推杆308收缩即可将工件抓起,再通过机械臂1的移动,可将工件转移,通过设置微型气泵304和管体305,在吸盘303与工件接触前,启动微型气泵304向管体305内排气,气流通过导气板306上的导气孔313吹向工件表面,可将工件与吸盘303的接触面上的碎屑吹扫清除,使得吸盘303能够紧密吸附在工件表面,避免抓取失效,在抓取完毕后,启动微型气泵304抽取管体305内的气体,可使管体305内保持负压状态,从而能大大提高吸盘303对工件抓取的牢固性,在松脱工件时,启动微型气泵304向管体305内排气,即可使吸盘303与工件快速分离,通过设置间距调节机构4和角度调节机构5,启动第二电动推杆401伸缩,第二电动推杆401可带动抓取机构3整体移动,顶板307可沿着滑杆402平稳滑动,从而能调节抓取机构3的抓取间距,启动电机501带动转轴502转动,转轴502带动安装座2转动,从而能调节抓取机构3的抓取角度,使抓取机构3在抓取工件时具有更高的灵活度。
33.应当理解的是,本实用新型的上述具体实施方式仅仅用于示例性说明或解释本实用新型的原理,而不构成对本实用新型的限制。因此,在不偏离本实用新型的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。此外,本实用新型所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。