1.本实用新型属于建筑领域,具体涉及一种多传感器的建筑机器人。
背景技术:
2.近些年来,“建筑工业化”和“绿色建筑”为信息化与建筑工业化的深度融合提供了前所未有的发展机遇,而机器人技术则会将有力促进建筑业技术升级、生产方式和管理模式变革,塑造工业化、智能化的新型建筑业态。建筑机器人是保障施工人员安全、提升工作品质的必然选择;也是解决建筑从业人力资源日益短缺的必然选择;是更好的解决传统的手工作业方式粗放、建材使用浪费大等问题,构建节约型社会的时代诉求。建筑用机器人在工作当中需要考虑到机器人的移动过程、机械臂的使用过程等,具体包含了建筑用机器人在移动过程中的路径规划、实时避障检测、当前场景识别、机械臂控制等等。
3.当前众多实现机器人移动路径规划的过程中最基本的技术为需要对当前机器人所处环境进行地图建模工作,目前有人工地图模型输入和自主探索建模两种方法。在使用人工地图模型输入时极大的限制了机器人的工作范围,只适用于地图环境不易发生变化的场景,对于场景经常变化的环境不适用。而且人工地图输入时可能会发生各种各样的差错,为机器人的使用带来影响。
4.实用新型
5.本实用新型的目的在于克服上述现有技术的缺点,提出一种多传感器的建筑机器人,以解决先有技术中建筑机器人难以适应建筑施工环境复杂、障碍物种类多样的环境特点,建筑机器人可以按照需求进行移动。
6.为达到上述目的,本实用新型采用以下技术方案予以实现:
7.一种多传感器的建筑机器人,包括车体,车体上设置有系统主控箱体和机械臂,机械臂和系统主控箱体相邻设置;车体的下部连接有驱动设备,驱动设备的下部转动连接有车轮;所述车体的上部两端各设置有一个红外传感器;
8.所述车体下部设置有第二摄像头,所述第二摄像头在驱动设备的前方,所述机械臂的上端设置有第三摄像头,所述车体的前端设置有第一摄像头,所述车体上部设置有超声波传感器,超声波传感器在系统主控箱体的前方;所述第一摄像头为rgb-d深度摄像头;
9.所述系统主控箱体内设置有中央控制器;
10.所述机械臂、驱动设备、红外传感器、第一摄像头、第二摄像头、超声波传感器均电性连接至中央控制器。
11.本实用新型的进一步改进在于:
12.优选的,中央控制器为dspace控制系统单板。
13.优选的,车体内设置有锂离子电池,所述锂离子电池和机械臂、驱动设备、红外传感器、第二摄像头、第一摄像头、第三摄像头、超声波传感器及中央控制器均电性连接。
14.优选的,所述第二摄像头和第三摄像头均为carsanboqs8130。
15.优选的,所述驱动设备包括伺服电极驱动器和四个轮毂电机,伺服电机驱动器分
别和四个轮毂电机连接,每一个轮毂电机设置在一个车轮上。
16.优选的,伺服电极驱动器为acs806。
17.优选的,红外传感器为红外避障传感器。
18.优选的,所述超声波传感器为ht23c16t/r-1。
19.优选的,所述第二摄像头朝向地面。
20.与现有技术相比,本实用新型具有以下有益效果:
21.本实用新型公开了一种基于多传感器的建筑机器人,该建筑机器人在本体构成上,主体由机械臂加可移动基座构成。该建筑机器人在系统主控箱体的上有机械臂和多个摄像头,使用rgb-d摄像头完成外界图像信息采集工作;rgb-d摄像头与中央控制器结合,使建筑机器人可以在任意时间明确自己所处的位置,从而确保建筑机器人可以按照需求进行移动。本实用新型通过使用rgb-d摄像头识别当前的动态障碍物信息,完成动态障碍物检测,再结合使用红外传感器,判断机器人当前是否完成了实时避障,最后中央处理器将已有的路径传递至机器人,整体使得建筑机器人在室内外工作过程中可以以其他路径移动到目标位置。
附图说明
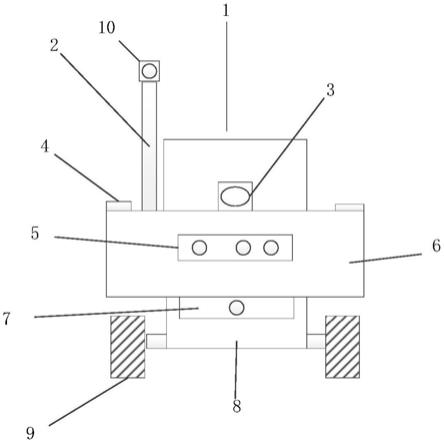
22.图1为本实用新型的系统结构图;
23.其中:1-.系统主控箱体;2.机械臂;3.超声波传感器;4.红外传感器;5.第一摄像头;6.车体;7.第二摄像头;8.驱动设备;9.车轮;10.第三摄像头。
具体实施方式
24.下面结合附图对本实用新型做进一步详细描述:
25.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制;术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性;此外,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
26.本实用新型的建筑机器人本体包括:第一摄像头5、第二摄像头7、红外传感器4、超声波传感器3等多种传感检测设备、四轮驱动系统8和机械臂2;rgb-d红外摄像头(kinect设备)
27.进一步的,本实用新型的建筑机器人装置包括车体6,车体6的上部固定设置有系统主控箱体1和机械臂2,系统主控箱体1和机械臂2相邻设置,二者不接触;车体6上部的两侧分别设置有一个红外传感器4,该红外传感器型号为e18-d80nk-n。系统主控箱体1设置有可打开的透明包装外壳,外壳底部与建筑机器人车体6相连,外壳侧壁的底部设有多个小孔用于布线,方便中央控制器连接各种传感设备和信息获取装置。
28.车体6上部设置有超声波传感器3,型号为ht23c16t/r-1。超声波传感器3在系统主控箱体1的前方。
29.机械臂2的上端设置有第三摄像头10,第三摄像头10的型号为carsanboqs8130,第三摄像头10和中央控制器连接。
30.车体6的下部连接有驱动设备8,驱动设备8的下部转动连接有车轮9;具体的驱动设备8包括伺服电机驱动器和四个轮毂电机,驱动伺服电极驱动器同时连接有四个轮毂电机,伺服电机驱动器的型号为acs806,每一个轮毂电机设置在一个车轮9上。车轮9为具有防滑功能的、轮胎表面有突起的橡胶轮胎,以更好的适应建筑施工环境。
31.在驱动设备8前方,车体6的下部设置有第二摄像头7、第二摄像头10的具体型号均为carsanboqs8130,第二摄像头10的朝向地面,用于检测地面的坑洞信息。
32.在车体6的前端面上设置有第一摄像头5,第一摄像头5位rgb-d深度摄像头,用于检测空间立体固定障碍物信息。
33.供电模块设置在车体6的尾部,供电模块采用48v60ah锂离子电池;该供电模块为全车的各个中央控制器、摄像头、传感器和驱动设备提供电能;锂离子电池续航能力强,且轻便便于携带。
34.中央控制器设置在车体中央,本实用新型的中央控制器设置在系统主控箱体1中,传感设备及信息获取装置分布于车体6上,中央控制器采用dspace控制系统单板,主要由cpu与外围i/0集成部分以及ds1103及ds1104处理器板等部分组成。中央控制器通过无线连接和pc端连接,进而将摄像头拍摄的图像和已有的路径传递至pc端,同时还能够接收pc端的指令。
35.具体的,传感器包括超声波传感器3和红外传感器4,信息获取装置为三个摄像头。机械臂2设置于车体右前方,机械臂2的上端设置有第三摄像头10,第三摄像头10为普通摄像头。
36.两个红外传感器4和第一摄像头5配合使用,先通过第一摄像头5通过使用rgb-d摄像头识别当前的动态障碍物信息,传递至中央控制器,中央控制器将指令发送至驱动系统,驱动系统带动机器人绕开后,再结合使用红外传感器4,判断机器人是否已经绕开障碍物,从而完成实时避障。
37.紧急制动:当建筑机器人在运行过程时,前方突然发生物体掉落等危机情况时,超声波传感器3会及时检测到障碍物与车体之间的距离,当距离小于安全距离时,中央处理器控制驱动设备8紧急制动,停止前进。在此基础上,中央处理器中连接有该报警装置,报警装置和驱动模块8连接,当超声波传感器3装置检测到障碍物出现且距离过近时,报警装置会及时发出警报信号,且中央控制系统器会发出指令驱动设备8紧急制动,让建筑机器人及时避障。报警装置由声光报警两部分组成,且喇叭于小灯设置于中央控制器的包装顶部,便于观察。
38.场景识别:利用摄像头实时传递工作位置的图片信息,pc屏幕会实时显示当前机器人所处位置信息,当建筑机器人移动到工作地点之后,会停止移动。
39.本实用新型种的供电系统与中央处理器、两种摄像头、驱动模块相连,驱动系统与机器人车体的轮子、机械臂相连,用于驱动建筑机器人的运动。
40.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛
盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本实用新型对各种可能的组合方式不再另行说明。此外,本实用新型的各种不同的实施方式之间也可以进行任意组合,只要其不违背本实用新型思想,其同样应当视为本实用新型所公开的内容。
41.针对上述研究背景以及相关技术问题,本实用新型的目的是立足于建筑用机器人这一类型,克服建筑施工场所障碍物数量多、类型复杂、环境状况复杂易变的问题,从而使得建筑机器人可以随时明确该地图中自己的当前位置,更好实现建筑机器人的定位以及移动路径规划等功能。提高建筑机器人移动、工作的安全性,利用多种传感设备,完成对建筑机器人的整体检测控制。
42.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。