1.本实用新型属于实训装置技术领域,具体涉及一种基于运动控制的实训用并联机器人。
背景技术:
2.鉴于目前市场上的并联机器人种类繁多,虽然功能齐全,应用领域广泛,但是缺乏一种能够应用于教学领域且满足实训教学的并联机器人。现有的大部分并联机器人在结构设计和运行程序方面已经实现结构化、标准化,为了符合工业化应用的需求,其主要的驱动装置隐藏于基板下方或者护罩腔室内,对于初步接触这种类型机器人的学生并不能使其充分了解它的运动结构和运行原理,所以这类成熟产品并不适用于培训学生对并联机器人进行具体的开发与操作实训。
技术实现要素:
3.本实用新型的目的是提供一种基于运动控制的实训用并联机器人,该并联机器人的内部机械结构充分开放,以适用于实训教学。
4.本实用新型提供了如下的技术方案:
5.一种基于运动控制的实训用并联机器人,包括:
6.静态基板,所述静态基板的上方竖直地安装多个电机座;
7.摆动机构,包括第一驱动装置、传动旋臂和运动平台;其中:
8.至少两个所述第一驱动装置间隔地安装于所述静态基板的电机座上;
9.所述传动旋臂安装于所述第一驱动装置的输出端,所述传动旋臂的输出端铰接运动平台,各个第一驱动装置通过相应的传动旋臂驱动所述运动平台上下摆动;
10.旋转机构,包括第二驱动装置和传动轴,其中:
11.所述第二驱动装置安装于所述静态基板的上方;
12.所述传动轴传动式连接所述第二驱动装置,且所述传动轴的另一端贯穿所述运动平台后连接应用终端,使所述应用终端由第二驱动装置驱动旋转;所述传动轴上安装万向节以配合所述摆动机构的摆角变化。
13.优选的,所述传动旋臂包括活动式连接的活动臂和支链组,所述活动臂键连接所述第一驱动装置的输出轴,所述支链组的下端安装于所述运动平台上;所述活动臂与所述支链组之间有一夹角。
14.优选的,所述支链组包括固定于所述活动臂的尾端的第一横杆和固定于所述运动平台上的第二横杆、以及平行地球铰接于所述第一横杆和第二横杆之间的支撑杆。
15.优选的,三组第一驱动装置和传动旋臂均匀地分布于所述静态基板上。
16.优选的,所述静态基板上均匀地设置三个避让槽,用于避让向下旋转的活动臂。
17.优选的,所述传动轴包括第一轴段、第二轴段、第三轴段和第四轴段;所述第一轴段键连接于所述第二驱动装置的输出端,所述第一轴段与所述第二轴段之间由第一万向节
连接;所述第二轴段的尾部沿轴向设有花键槽,所述第三轴段与第二轴段之间由所述花键槽键连接,使所述第三轴段可相对于所述第二轴段沿轴向滑动;所述第三轴段与所述第四轴段之间由第二万向节连接,所述第四轴段的尾部安装所述应用终端。
18.优选的,所述静态基板与所述运动平台的中央均安装轴承,所述第一轴段与所述第四轴段分别安装于相应的轴承内。
19.优选的,所述静态基板通过开放式的连接架安装于运行机台上,所述第二驱动装置位于所述连接架的下方。
20.优选的,所述第四轴段的尾端由法兰连接工装架,所述应用终端安装于所述工装架上,所述应用终端为吸盘或者夹爪。
21.本实用新型的有益效果是:
22.本实用新型摆动机构的第一驱动装置连接传动旋臂,通过传动旋臂连接运动平台,通过控制各个第一驱动装置的输出,使运动平台在三维空间内摆动。该并联机器人在静态基板上安装电机座,第一驱动装置安装于电机座上,摆动机构的内部机械结构充分开放,更适用于实训教学。
23.本实用新型旋转机构的第二驱动装置驱动传动轴旋转,带动应用终端旋转。第二驱动装置安装于静态基板的上方,传动轴的万向节适应摆动机构的摆角而旋转,其内部机械结构也充分开放。
24.本实用新型在传动轴的尾端安装工装架,工装架上可根据课程需要搭配不同的工装实现不同的功能,通用性高。
附图说明
25.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
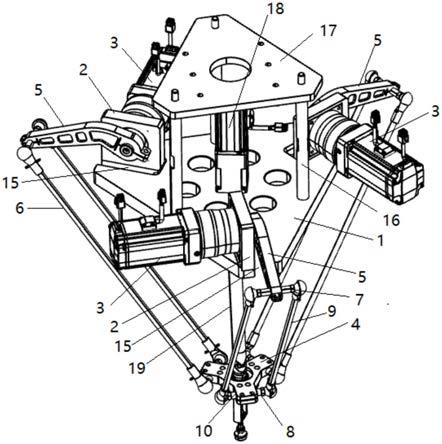
26.图1是本实用新型的整体结构示意图;
27.图2是本实用新型运动平台处的装配结构示意图;
28.图3是本实用新型的传动轴的外部结构示意图;
29.图中标记为:1.静态基板;2.电机座;3.第一驱动装置;4.运动平台;5.活动臂;6.支链组;7.第一横杆;8.第二横杆;9.支撑杆;10.凸沿;11.上卡边;12. 下卡边;13.卡槽;14.卡缝;15.避让槽;16.支撑柱;17.连接板;18.第二驱动装置;19.传动轴;20.第一轴段;21.第二轴段;22.第三轴段;23.第四轴段;24. 第一万向节;25.第二万向节;26.花键槽;27.法兰组;28.工装架;29.吸盘。
具体实施方式
30.如图1和图2所示,一种基于运动控制的实训用并联机器人,包括:静态基板1、摆动机构和旋转机构。
31.静态基板1水平设置,其上方竖直地螺接或者焊接多个电机座2。
32.摆动机构包括第一驱动装置3、传动旋臂和运动平台4;其中三个第一驱动装置3沿圆周方向间隔均匀地安装于静态基板的电机座2上。第一驱动装置3 可选用伺服电机,伺服电机与控制器电连接。
33.传动旋臂安装于第一驱动装置3的输出端,传动旋臂的输出端铰接运动平台4,各个第一驱动装置通过相应的传动旋臂驱动运动平台4上下摆动。具体地,传动旋臂包括活动式连接的活动臂5和支链组6,活动臂5与支链组6之间有一夹角。活动臂5的一端键连接第一驱动装置3的输出轴,由第一驱动装置3直接驱动旋转。支链组6的下端安装于运动平台4上;支链组6包括固定于活动臂5的尾端的第一横杆7和固定于运动平台4上的第二横杆8、以及两根平行地球铰接于第一横杆7和第二横杆8之间的支撑杆9。支链组6跟随活动臂5上下移动,从而使运动平台4倾斜地摆动。
34.运动平台4为三叶型,运动平台的三个凸沿10上均设有上卡边11和下卡边12,上卡边11与下卡边12之间留有互相连通的卡槽13和卡缝14,卡缝14 位于凸沿10的边缘,第二横杆8嵌入该卡槽13内,然后由螺栓由卡缝14处锁紧上卡边111和下卡边12,使第二横杆8固定于运动平台4上。类似的,第一横杆7也由螺栓卡紧于活动臂的尾端。
35.静态基板1上沿圆周方向均匀地设置三个避让槽15,用于避让向下旋转的活动臂5,保证活动臂5具有足够的旋转行程。
36.静态基板1通过连接架安装于运行机台上,连接架固定安装于静态基板1 的上方,连接架包括三根支撑柱16和固定于支撑柱16顶部的连接板17,形成开放式的空间。
37.旋转机构包括第二驱动装置18和传动轴19,第二驱动装置18竖直地安装于静态基板1上且位于连接架的下方,便于观察到第二驱动装置。
38.传动轴19传动式连接第二驱动装置18,且传动轴19的另一端贯穿运动平台4后连接应用终端,使应用终端由第二驱动装置驱动旋转;传动轴19上安装万向节以配合摆动机构的摆角变化。第二驱动装置选用伺服电机,其也电连接控制器。
39.具体地,如图3所示,传动轴19包括依次连接的第一轴段20、第二轴段 21、第三轴段22和第四轴段23;第一轴段20键连接于第二驱动装置18的输出端,第一轴段20与第二轴段21之间由第一万向节24连接;第二轴段21的尾部沿轴向设有多个花键槽26,第三轴段22上端的中空管内部设有与花键槽 26匹配的键齿,第三轴段22与第二轴段21之间由花键槽26与键齿传动连接,当运动平台4摆动时,第三轴段22可相对于第二轴段21沿轴向滑动,以适应运动平台摆动产生的高度差,并且第三轴段22与第二轴段21同步旋转。第三轴段22与第四轴段23之间由第二万向节25连接,第四轴段23的尾部安装法兰组27,法兰组27的下方螺接工装架28,应用终端安装于工装架28上,应用终端为吸盘29或者夹爪。
40.其中,静态基板1与运动平台4的中央均安装轴承,第一轴段20与第四轴段23分别安装于相应的轴承内。
41.本实用新型的整体结构采用优质铝合金材料,在保证其结构强度的同时也大大的降低的整体重量,可以方便搬运与转移设备。机器人的传动旋臂采用碳纤维材质,能够满足末端载荷需求,降低了机器人本体的重量,提升了机械手臂的强度。
42.本实用新型的工作过程为:
43.实训时,启动第一驱动装置3和第二驱动装置18,观察第一驱动装置3驱动传动旋臂上下活动,实现运动平台4带动应用终端在三维空间内摆动;观察第二驱动装置18驱动传动轴19旋转,实现应用终端在竖直面内旋转。由于摆动机构和旋转机构均为开放式结构,且第一驱动装置3和第二驱动装置18均未受到结构件的阻挡,因此可直观地观察到各个机械零件之间的相互传动关系。
44.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。