1.本实用新型涉及机柜技术领域,尤其涉及一种机柜巡检机器人。
背景技术:
2.机柜是电气设备中不可或缺的组成部分,是电气控制设备的载体。一般由冷轧钢板或合金制作而成。可以提供对存放设备的防水、防尘、防电磁干扰等防护作用。机柜一般分为服务器机柜、网络机柜、控制台机柜等;
3.目前巡检机器人巡检基本都是通过设置的摄像机给机柜内部署的服务器等it设备的指示灯进行拍照,并进行图像识别,以此判断设备的运行状态。但是机房内的机柜上绝大多数都会设有机柜门,机柜门的存在会影响巡检机器人的拍照质量,降低巡检机器人这一功能的可用性,同时现有的巡检机器人缺乏应急装置,一旦柜体内发生火灾,就会带来极大的损失。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种机柜巡检机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种机柜巡检机器人,包括机柜本体,所述机柜本体的外表面一侧安装有壳体,所述壳体的内部安装有升降机构,所述壳体的顶部固定连接有保护外壳,所述保护外壳的内部安装有第一电机,且第一电机的驱动轴与升降机构相连接,所述机柜本体的内部安装有横向移动机构,所述横向移动机构的内部安装有第二电机,所述横向移动机构安装有控制器,所述横向移动机构的顶部安装有监测组件,所述监测组件与机柜本体之间共同安装有灭火组件。
6.进一步的,所述升降机构包括螺杆,且螺杆与壳体之间转动连接,所述螺杆与第一电机的驱动轴之间固定连接,所述螺杆的外表面螺纹连接有第一滑座,第一电机带动螺杆转动,从而带动第一滑座移动,从而带动横向移动机构进行移动。
7.进一步的,所述横向移动机构包括滑杆和第二滑座,且控制器固定安装在第二滑座的外表面,所述第二滑座的外表面开设有通孔,且滑杆与通孔之间滑动连接,所述通孔的底部开设有安装槽,所述安装槽的
·
内部转动连接有齿轮,且齿轮与第二电机的驱动轴之间固定连接,所述滑杆的底部开设有凹槽,且凹槽的内顶部固定安装有齿条,且齿条与齿轮之间啮合连接,第二电机带动齿轮转动,从而通过齿条带动第二滑座移动,从而带动监测组件移动。
8.进一步的,所述第一滑座与滑杆之间固定连接,便于升降机构带动横向移动机构上下移动。
9.进一步的,所述机柜本体的内表面一侧开设有行程槽,且行程槽与壳体的内部相贯通,所述滑杆与行程槽之间滑动连接,便于滑杆上下移动。
10.进一步的,所述监测组件包括安装板,且安装板固定安装在第二滑座的顶部,所述
安装板的内端面固定安装有烟雾传感器、红外高清摄像头和红外温度传感器,烟雾传感器、红外高清摄像头和红外温度传感器均与控制器信号连接,便于监测信号的传输。
11.进一步的,所述灭火组件包括二氧化碳储存罐、连接软管和喷管,且二氧化碳储存罐固定安装在机柜本体的外表面,所述连接软管与二氧化碳储存罐之间安装有控制阀,所述连接软管与喷管之间固定连接,所述喷管固定安装在监测组件的顶部,当确定火灾位置时,打开控制阀,二氧化碳通过连接软管输送至喷管,然后通过喷管喷出灭火。
12.本实用新型的有益效果:
13.1、本实用新型在使用时,该机柜巡检机器人,监测组件安装在机柜内部,避免拍照受到柜门影响,再通过设置的升降机构、第一电机、横向移动机构和第二电机,可以带动监测组件对机柜内部进行全面监测。
14.2、本实用新型在使用时,该机柜巡检机器人,通过设置灭火组件、红外线传感器、烟雾传感器、升降机构、第一电机、横向移动机构和第二电机,可以快速确定发生火情的具体位置,然后通过灭火组件进行灭火,降低火灾带来的损失。
15.3、本实用新型在使用时,该机柜巡检机器人,通过二氧化碳进行灭火,因二氧化碳具有流动性好、喷射率高、不腐蚀容器和不易变质等优良性能,可以进一步降低损失。
附图说明
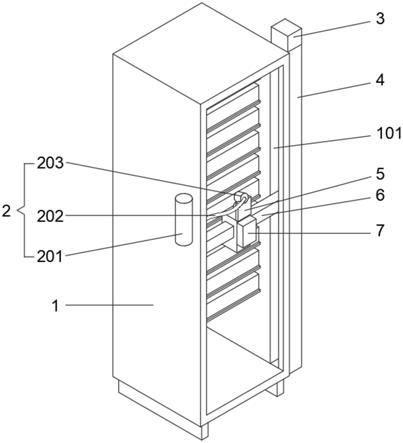
16.图1为本实用新型的整体结构示意图;
17.图2为本实用新型的监测组件结构示意图;
18.图3为本实用新型的升降机构安装示意图;
19.图4为本实用新型的横向移动机构结构示意图。
20.图例说明:
21.1、机柜本体;101、行程槽;2、灭火组件;201、二氧化碳储存罐;202、连接软管;203、喷管;3、保护外壳;4、壳体;5、监测组件;501、安装板;502、烟雾传感器;503、红外高清摄像头;504、红外温度传感器;6、横向移动机构;601、第二滑座;602、滑杆;603、齿条;604、齿轮;605、安装槽;606、凹槽;607、通孔;7、控制器;8、第一电机;9、升降机构;901、螺杆;902、第一滑座;10、第二电机。
具体实施方式
22.图1和图3所示,涉及一种机柜巡检机器人,包括机柜本体1,所述机柜本体1的外表面一侧安装有壳体4,壳体4的内部安装有升降机构9,壳体4的顶部固定连接有保护外壳3,保护外壳3的内部安装有第一电机8,且第一电机8的驱动轴与升降机构9相连接,机柜本体1的内部安装有横向移动机构6,横向移动机构6的内部安装有第二电机10,横向移动机构6安装有控制器7,横向移动机构6的顶部安装有监测组件5,监测组件5与机柜本体1之间共同安装有灭火组件2。
23.升降机构9包括螺杆901,且螺杆901与壳体4之间转动连接,螺杆901与第一电机8的驱动轴之间固定连接,螺杆901的外表面螺纹连接有第一滑座902。
24.机柜本体1的内表面一侧开设有行程槽101,且行程槽101与壳体4的内部相贯通,滑杆602与行程槽101之间滑动连接。
25.第一滑座902与滑杆602之间固定连接。
26.灭火组件2包括二氧化碳储存罐201、连接软管202和喷管203,且二氧化碳储存罐201固定安装在机柜本体1的外表面,连接软管202与二氧化碳储存罐201之间安装有控制阀,连接软管202与喷管203之间固定连接,喷管203固定安装在监测组件5的顶部。
27.图2所示,监测组件5包括安装板501,且安装板501固定安装在第二滑座601的顶部,安装板501的内端面固定安装有烟雾传感器502、红外高清摄像头503和红外温度传感器504。
28.图4所示,横向移动机构6包括滑杆602和第二滑座601,且控制器7固定安装在第二滑座601的外表面,第二滑座601的外表面开设有通孔607,且滑杆602与通孔607之间滑动连接,通孔607的底部开设有安装槽605,安装槽605的内部转动连接有齿轮604,且齿轮604与第二电机10的驱动轴之间固定连接,滑杆602的底部开设有凹槽606,且凹槽606的内顶部固定安装有齿条603,且齿条603与齿轮604之间啮合连接。
29.在使用机柜巡检机器人时,首先通过控制器7控制第一电机8启动,第一电机8带动螺杆901转动,从而带动第一滑座902移动,从而带动横向移动机构6和监测组件5进行移动,每移动一段距离,第一电机8停止运行,然后控制器7控制第二电机10启动,第二电机10带动齿轮604转动,从而通过齿条603带动第二滑座601移动,从而带动监测组件5移动,监测组件5通过红外高清摄像头503拍照,拍照后将信息发送至控制器7进行处理,同时烟雾传感器502与红外温度传感器504也将监测信号发送至控制器7进行处理,若发生火灾,控制器7升降机构9与横向移动机构6带动监测组件5移动,以便快速确定火灾具体位置,然后打开控制阀,二氧化碳通过连接软管202输送至喷管203,然后通过喷管203喷出进行灭火。
30.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。