1.本实用新型涉及机器人玩具技术领域,具体为一种鳐鱼机器人。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器。历史上最早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、拜、伏等能力。
3.目前的玩具基本上都是固定不可动的,要么就像一个组装模型,可玩性不高。
技术实现要素:
4.本实用新型的目的在于提供一种通过摆动轮与轮子的结合可以灵活的移动,摆动板的加入使得机器人变得灵活有趣的鳐鱼机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种鳐鱼机器人,包括机器人本体,所述机器人本体上对称设有主架板a、主架板b,主架板a与主架板b设置在同一水平高度,所述主架板a与主架板b之间采用连接支架盘配合连接,所述主架板a与主架板b靠近一端的衔接处下方设有直流电机a,直流电机a与主架板a、主架板b之间采用l型连接支架固定连接,直流电机a的转轴上设有摆动轮,所述主架板a与主架板b衔接处靠近一端的上方设有托架板,托架板与主架板a、主架板b之间采用连接柱固定连接,所述托架板的上方设有电池盒,电池盒的正上方设有遥控接收板,所述遥控接收板与托架板之间采用连接柱固定连接,所述主架板a与主架板b衔接处靠近另一端的下方中央设有直流电机b,直流电机b的转轴上设有轮子,所述主架板a与主架板b靠近另一端的上方设有主控板,主控板与主架板a、主架板b之间采用连接柱固定连接,所述主架板a与主架板b衔接处的一端端头处设有伺服电机,伺服电机的转轴上设有摆尾机构,所述摆尾机构与伺服电机的转轴之间配合安装。
6.优选的,所述遥控接收板上设有排线插头、排线插槽、单片机、电容,所述排线插头、排线插槽、电容分别与单片机连接,所述遥控接收板靠近一端的上方对称设有l型连接支架,l型连接支架与遥控接收板之间采用螺丝固定连接,所述l型连接支架上设有滑轮,滑轮与l型连接支架支架之间配合安装。
7.优选的,所述主架板a与主架板b底部靠近两侧对称设有支撑柱,所述主架板a、主架板b与支撑柱之间采用螺丝固定连接。
8.优选的,所述主控板上设有电容、开关、单片机、连接线插头以及信号收发器。
9.优选的,所述摆尾机构上设有摆臂,所述摆臂的一端与伺服电机的转轴固定连接,摆臂的另一端设有摆动板,摆动板与摆臂之间采用l型连接支架固定连接,所述摆动板在水平方向摆动的角度范围为0-180
°
。
10.与现有技术相比,本实用新型的有益效果是:
11.(1)主架板a与主架板b靠近一端的衔接处下方设有直流电机a,直流电机a与主架板a、主架板b之间采用l型连接支架固定连接,直流电机a的转轴上设有摆动轮,直流电机a驱动摆动轮转动,使机器人本体实现转向功能,机器人本体可以灵活的向各个方向转动;
12.(2)遥控接收板靠近一端的上方对称设有l型连接支架,l型连接支架与遥控接收板之间采用螺丝固定连接,l型连接支架上设有滑轮,滑轮与l型连接支架支架之间配合安装,滑轮的安装使得机器人本体本体的外观更加生动形象;
13.(3)该机器人本体通过摆动轮与轮子的结合可以灵活的移动,摆动板的加入使得机器人变得灵活有趣。
附图说明
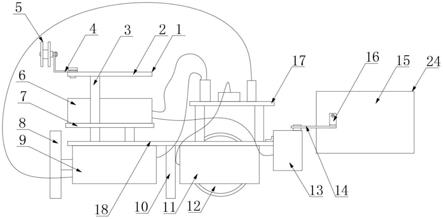
14.图1为本实用新型机器人本体侧视图;
15.图2为本实用新型机器人本体俯视图。
16.图中:1、机器人本体;2、遥控接收板;3、连接柱;4、l型连接支架;5、滑轮;6、电池盒;7、托架板;8、摆动轮;9、直流电机a;10、支撑柱;11、直流电机b;12、轮子;13、伺服电机;14、摆臂;15、摆动板;16、固定连接件;17、主控板;18、主架板a;19、主架板b;20、排线插头;21、排线插槽;22、单片机;23、电容;24、摆尾机构。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.请参阅图1-2,本实用新型提供一种技术方案:一种鳐鱼机器人,包括机器人本体1,机器人本体1上对称设有主架板a18、主架板b19,主架板a18与主架板b19设置在同一水平高度,主架板a18与主架板b19之间采用连接支架盘配合连接,主架板a18与主架板b19靠近一端的衔接处下方设有直流电机a9,直流电机a9与主架板a18、主架板b19之间采用l型连接支架4固定连接,直流电机a9的转轴上设有摆动轮8,直流电机a9驱动摆动轮8转动,使机器人本体1实现转向功能,机器人本体1可以灵活的向各个方向转动。
19.主架板a18与主架板b19衔接处靠近一端的上方设有托架板7,托架板7与主架板a18、主架板b19之间采用连接柱固定连接,托架板7的上方设有电池盒6,电池盒6的正上方设有遥控接收板2,遥控接收板2上设有排线插头20、排线插槽21、单片机22、电容23,排线插头20、排线插槽21、电容23分别与单片机22连接,遥控接收板2靠近一端的上方对称设有l型连接支架4,l型连接支架4与遥控接收板2之间采用螺丝固定连接,l型连接支架4上设有滑轮5,滑轮5与l型连接支架4支架之间配合安装,滑轮5的安装使得机器人本体1本体的外观更加生动形象。
20.遥控接收板2与托架板7之间采用连接柱固定连接,主架板a18与主架板b19衔接处靠近另一端的下方中央设有直流电机b11,直流电机b11的转轴上设有轮子12,直流电机b11上的轮子12在直流电机b11的驱动下使机器人本体1移动,主架板a18与主架板b19靠近另一端的上方设有主控板17,主控板17上设有电容、开关、单片机、连接线插头以及信号收发器。
21.主控板17与主架板a18、主架板b19之间采用连接柱固定连接,主架板a18与主架板b19底部靠近两侧对称设有支撑柱10,主架板a18、主架板b19与支撑柱10之间采用螺丝固定连接,主架板a18与主架板b19衔接处的一端端头处设有伺服电机13,伺服电机13的转轴上
设有摆尾机构24,摆尾机构24上设有摆臂14,摆臂14的一端与伺服电机13的转轴固定连接,摆臂14的另一端设有摆动板15,摆动板15与摆臂14之间采用l型连接支架4固定连接,摆动板15在水平方向摆动的角度范围为0-180
°
,摆尾机构24与伺服电机13的转轴之间配合安装,摆尾机构24摆动为机器人本体1提供前进的动力
22.该机器人本体通过摆动轮与轮子的结合可以灵活的移动,摆动板的加入使得机器人变得灵活有趣。
23.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种鳐鱼机器人,包括机器人本体(1),其特征在于:所述机器人本体(1)上对称设有主架板a(18)、主架板b(19),主架板a(18)与主架板b(19)设置在同一水平高度,所述主架板a(18)与主架板b(19)之间采用连接支架盘配合连接,所述主架板a(18)与主架板b(19)靠近一端的衔接处下方设有直流电机a(9),直流电机a(9)与主架板a(18)、主架板b(19)之间采用l型连接支架(4)固定连接,直流电机a(9)的转轴上设有摆动轮(8),所述主架板a(18)与主架板b(19)衔接处靠近一端的上方设有托架板(7),托架板(7)与主架板a(18)、主架板b(19)之间采用连接柱固定连接,所述托架板(7)的上方设有电池盒(6),电池盒(6)的正上方设有遥控接收板(2),所述遥控接收板(2)与托架板(7)之间采用连接柱固定连接,所述主架板a(18)与主架板b(19)衔接处靠近另一端的下方中央设有直流电机b(11),直流电机b(11)的转轴上设有轮子(12),所述主架板a(18)与主架板b(19)靠近另一端的上方设有主控板(17),主控板(17)与主架板a(18)、主架板b(19)之间采用连接柱固定连接,所述主架板a(18)与主架板b(19)衔接处的一端端头处设有伺服电机(13),伺服电机(13)的转轴上设有摆尾机构(24),所述摆尾机构(24)与伺服电机(13)的转轴之间配合安装。2.根据权利要求1所述的一种鳐鱼机器人,其特征在于:所述遥控接收板(2)上设有排线插头(20)、排线插槽(21)、单片机(22)、电容(23),所述排线插头(20)、排线插槽(21)、电容(23)分别与单片机(22)连接,所述遥控接收板(2)靠近一端的上方对称设有l型连接支架(4),l型连接支架(4)与遥控接收板(2)之间采用螺丝固定连接,所述l型连接支架(4)上设有滑轮(5),滑轮(5)与l型连接支架(4)支架之间配合安装。3.根据权利要求1所述的一种鳐鱼机器人,其特征在于:所述主架板a(18)与主架板b(19)底部靠近两侧对称设有支撑柱(10),所述主架板a(18)、主架板b(19)与支撑柱(10)之间采用螺丝固定连接。4.根据权利要求1所述的一种鳐鱼机器人,其特征在于:所述主控板(17)上设有电容、开关、单片机、连接线插头以及信号收发器。5.根据权利要求1所述的一种鳐鱼机器人,其特征在于:所述摆尾机构(24)上设有摆臂(14),所述摆臂(14)的一端与伺服电机(13)的转轴固定连接,摆臂(14)的另一端设有摆动板(15),摆动板(15)与摆臂(14)之间采用l型连接支架(4)固定连接,所述摆动板(15)在水平方向摆动的角度范围为0-180
°
。
技术总结
本实用新型公开了一种鳐鱼机器人,包括机器人本体,在机器人本体上对称设有主架板A与主架板B,主架板A与主架板B的衔接处下方设有直流电机A,直流电机A的转轴上设有摆动轮,主架板A与主架板B衔接处的上方设有电池盒,电池盒的正上方设有遥控接收板,遥控接收板一侧边缘的上方对称设有L型连接支架,L型连接支架上设有滑轮,靠近另一端的下方中央设有直流电机B,直流电机B的转轴上设有轮子,主架板A与主架板B靠近另一端的上方设有主控板,主架板A与主架板B的一端端头中央设有伺服电机,伺服电机转轴上设有摆动板,该机器人本体通过摆动轮与轮子的结合可以灵活的移动,摆动板的加入使得机器人变得灵活有趣。机器人变得灵活有趣。机器人变得灵活有趣。
技术研发人员:高一博 傅扬洋 陈楠忆 马振轩 袁嘉毅 王梓毅
受保护的技术使用者:高一博
技术研发日:2021.08.27
技术公布日:2022/2/11