1.本实用新型涉及一种语音识别装置,具体是一种交互式语音识别装置。
背景技术:
2.语音识别作为人工智能下很火爆的一门学科,是当下研究的一个重要领域。现阶段语音识别大多实现于智能硬件中,比如和机器人进行人机交互。语音识别模块用于识别用户语音信息并解析用户意图,使用人机交互中心来根据语义匹配存储模块中的对应存储内容进行播报,完成人机交互。
3.但是,现有语音识别装置只能被动接受语音进行识别,无法进行图像识别,易造成识别干扰,从而没法准确的进行判断,在实际使用过程中效果很差,人机互动能力差。
技术实现要素:
4.本实用新型的目的在于提供一种交互式语音识别装置,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种交互式语音识别装置,包括机器人机身和设置在机器人机身顶部的机器人头部,所述机器人机身内设有可编程的控制单元,在机器人头部的前侧由上至下依序设有摄像头和显示器,所述摄像头和显示器分别与控制单元连接,通过摄像头、显示器和控制单元的配合进行图像识别;
7.在机器人头部的两侧设有扬声器,在显示器下方的机器人头部上设有麦克风,所述扬声器和麦克风分别与控制单元连接,通过扬声器、麦克风和控制单元的配合进行语音识别。
8.作为本实用新型进一步的方案:所述控制单元包括设置在机器人机身内的可编程控制器和无线通讯模块,所述无线通讯模块通过无线信号与外部终端连接,所述摄像头、显示器、扬声器和麦克风分别与可编程控制器连接。
9.作为本实用新型进一步的方案:所述机器人机身的底部设有行走底盘,在行走底盘内设有激光雷达传感器和超声波传感器,在行走底盘的前侧设有与激光雷达传感器和超声波传感器相配合的雷达检测孔和超声波感应孔;行走底盘、激光雷达传感器和超声波传感器分别与控制单元连接。
10.作为本实用新型进一步的方案:所述显示器采用集成触摸显示屏。
11.作为本实用新型进一步的方案:所述机器人机身的后侧面设有紧急停止按钮,所述紧急停止按钮与控制单元连接。
12.作为本实用新型进一步的方案:所述机器人机身的后侧开设有若干第一散热孔,在机器人头部的后侧开设有若干第二散热孔。
13.与现有技术相比,本实用新型的有益效果是:
14.本实用新型采用上述结构后,通过摄像头、显示器和控制单元的配合进行图像识
别,事先采集图像,并将其放在图像数据库中,在使用过程中,可将当前摄像头采集的图像与数据库的图像进行对比。再通过扬声器、麦克风和控制单元的配合进行语音识别。本实用新型结果紧凑,图像识别结果和语音识别结果相结合,可有效降低干扰,能够做出准确的判断,人机互动能力较好。
附图说明
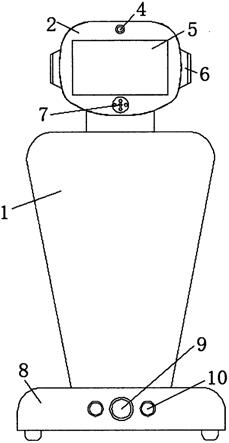
15.图1为一种交互式语音识别装置的主视图。
16.图2为一种交互式语音识别装置的后视图。
17.图3为一种交互式语音识别装置中机身内部的结构示意图。
18.图中:1、机器人机身;2、机器人头部;3、控制单元;301、可编程控制器;302、无线通讯模块;4、摄像头;5、显示器;6、扬声器;7、麦克风;8、行走底盘;9、激光雷达传感器;10、超声波传感器;11、紧急停止按钮;12、第一散热孔;13、第二散热孔。
具体实施方式
19.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
20.请参阅图1-3,一种交互式语音识别装置,包括机器人机身1和设置在机器人机身1顶部的机器人头部2,所述机器人机身1内设有可编程的控制单元3,在机器人头部2的前侧由上至下依序设有摄像头4和显示器5,所述摄像头4和显示器5分别与控制单元3连接,通过摄像头4、显示器5和控制单元3的配合进行图像识别;事先采集图像,并将其放在图像数据库中,在使用过程中,可将当前摄像头4采集的图像与数据库的图像进行对比。在机器人头部2的两侧设有扬声器6,在显示器5下方的机器人头部2上设有麦克风7,所述扬声器6和麦克风7分别与控制单元3连接,通过扬声器6、麦克风7和控制单元3的配合进行语音识别。图像识别结果和语音识别结果相结合,可有效降低干扰,能够做出准确的判断,人机互动能力较好。
21.其中,所述控制单元3包括设置在机器人机身1内的可编程控制器301和无线通讯模块302,所述无线通讯模块302通过无线信号与外部终端连接,所述摄像头4、显示器5、扬声器6和麦克风7分别与可编程控制器301连接。可在可编程控制器301内植入图像识别系统和语音识别系统。
22.具体的,所述机器人机身1的底部设有行走底盘8,在行走底盘8内设有激光雷达传感器9和超声波传感器10,在行走底盘8的前侧设有与激光雷达传感器9和超声波传感器10相配合的雷达检测孔和超声波感应孔;行走底盘8、激光雷达传感器9和超声波传感器10分别与控制单元3连接。通过行走底盘8、激光雷达传感器9和超声波传感器10的配合,实现机器人自主导航,同时可以自动避开障碍物。
23.进一步的,所述显示器5采用集成触摸显示屏,便于使用。
24.另外,所述机器人机身1的后侧面设有紧急停止按钮11,所述紧急停止按钮11与控制单元3连接。通过紧急停止按钮11,可以在突发状况时,紧急关闭机器人,使其停止移动。
25.进一步的,所述机器人机身1的后侧开设有若干第一散热孔12,在机器人头部2的后侧开设有若干第二散热孔13,可进行散热。
26.在本实施例中,向可编程控制器301内植入现有的图像识别程序和语音识别程序,
即可进行图像识别和语音识别,程序为现有技术,在此不再赘述。另外,需要说明的是,本申请所采用的控制单元3及与控制单元3连接的无线通讯模块302、摄像头4、显示器5、扬声器6、麦克风7、行走底盘8、激光雷达传感器9、超声波传感器10和紧急停止按钮11均为现有技术,各部件之间的连接,也均为现有技术,因此在此不再赘述其连接关系及原理。
27.本实用新型的工作原理是:使用时,机器人通过摄像头4、显示器5和控制单元3的配合,对当前图像进行采集和识别;然后,再通过扬声器6、麦克风7和控制单元3的配合,对当前语音进行采集和识别。最后,结合图像识别信息和语音识别信息,对指令做出判断,人机互动能力较好。
28.上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下做出各种变化。
技术特征:
1.一种交互式语音识别装置,包括机器人机身(1)和设置在机器人机身(1)顶部的机器人头部(2),其特征在于,所述机器人机身(1)内设有可编程的控制单元(3),在机器人头部(2)的前侧由上至下依序设有摄像头(4)和显示器(5),所述摄像头(4)和显示器(5)分别与控制单元(3)连接,通过摄像头(4)、显示器(5)和控制单元(3)的配合进行图像识别;在机器人头部(2)的两侧设有扬声器(6),在显示器(5)下方的机器人头部(2)上设有麦克风(7),所述扬声器(6)和麦克风(7)分别与控制单元(3)连接,通过扬声器(6)、麦克风(7)和控制单元(3)的配合进行语音识别。2.根据权利要求1所述的一种交互式语音识别装置,其特征在于,所述控制单元(3)包括设置在机器人机身(1)内的可编程控制器(301)和无线通讯模块(302),所述无线通讯模块(302)通过无线信号与外部终端连接,所述摄像头(4)、显示器(5)、扬声器(6)和麦克风(7)分别与可编程控制器(301)连接。3.根据权利要求1所述的一种交互式语音识别装置,其特征在于,所述机器人机身(1)的底部设有行走底盘(8),在行走底盘(8)内设有激光雷达传感器(9)和超声波传感器(10),在行走底盘(8)的前侧设有与激光雷达传感器(9)和超声波传感器(10)相配合的雷达检测孔和超声波感应孔;行走底盘(8)、激光雷达传感器(9)和超声波传感器(10)分别与控制单元(3)连接。4.根据权利要求1所述的一种交互式语音识别装置,其特征在于,所述显示器(5)采用集成触摸显示屏。5.根据权利要求1所述的一种交互式语音识别装置,其特征在于,所述机器人机身(1)的后侧面设有紧急停止按钮(11),所述紧急停止按钮(11)与控制单元(3)连接。6.根据权利要求1所述的一种交互式语音识别装置,其特征在于,所述机器人机身(1)的后侧开设有若干第一散热孔(12),在机器人头部(2)的后侧开设有若干第二散热孔(13)。
技术总结
本实用新型提供了一种交互式语音识别装置,包括机器人机身和设置在机器人机身顶部的机器人头部,所述机器人机身内设有可编程的控制单元,在机器人头部的前侧由上至下依序设有摄像头和显示器,所述摄像头和显示器分别与控制单元连接,通过摄像头、显示器和控制单元的配合进行图像识别;在机器人头部的两侧设有扬声器,在显示器下方的机器人头部上设有麦克风,所述扬声器和麦克风分别与控制单元连接,通过扬声器、麦克风和控制单元的配合进行语音识别;本实用新型结果紧凑,图像识别结果和语音识别结果相结合,可有效降低干扰,能够做出准确的判断,人机互动能力较好。人机互动能力较好。人机互动能力较好。
技术研发人员:吴强 孙小林
受保护的技术使用者:昆山壹年众生科技有限公司
技术研发日:2021.09.26
技术公布日:2022/2/11